一种半正定规划的RSS-TOA联合定位方法
文献发布时间:2023-06-19 11:29:13
技术领域
本发明涉及定位技术领域,尤其涉及无线传感器网络的定位方法,具体地说是一种半正定规划的RSS-TOA联合定位方法。
背景技术
近年来,无线传感器网络定位技术在各领域得到了广泛的应用,比如污染监测,深海勘探,农业防灾等,在这些领域,无法用GPS/北斗等卫星进行定位,而易于实施的小规模的无线传感器网络来实现对人员等信息的定位就具有优势。其中,小规模的传感器节点定位技术的原理是通过得到噪声测量值来估计出目标源的位置坐标。通常使用的传感器定位噪声测量方式包括到达时间(TOA)、到达时差(TDOA)、到达角(AOA)和接收信号强度(RSS)。这四种测量方式在不同场景下各自有优缺点,最近,越来越多的研究涉及到这四种测量方式的混合,理论证明了可有效提高定位精度。其中RSS和TOA噪声测量的定位方法由于廉价且易于实现而被人们重视起来。
最近的研究主要有两种:
1.在最大似然估计(ML)准则原理上对RSS和TOA噪声测量模型进行估计求解,比如王韦刚等人的《一种改进的室内三维定位方法与实验》中的残差因子衰减(RBFR)方法,采用了抑制RSS和TOA噪声的偏差模型,再应用非线性算法求解,但RSS和TOA噪声测量模型具有高度非线性和非凸性,此外RBFR算法中利用拟牛顿法求解这类非线性问题本身就存在较大的误差,无法得到最佳的求解数值,也就无法实现精确的定位。
2.在最小二乘估计(LS)准则原理上对RSS和TOA噪声测量模型进行估计求解,比如杨超超等人的《一种基于TOA和RSS混合的室内定位算法》中的二步最小二乘(TSLS)方法,其将所有RSS和TOA噪声测量模型视为线性的,在此基础上利用泰勒展开构建新的约束条件,然后利用二步最小二乘法(TSLS)将目标位置的范围逐步缩小,最后估计出目标位置。但是,过度近似将带来误差,同时实验发现该求解算法的定位精度还不够理想,需要提高。
发明内容
本发明旨在解决以上现有技术的问题,提出了一种基于RSS的一种半正定规划的RSS-TOA联合定位方法。
本发明采用的技术方案如下:
一种半正定规划的RSS-TOA联合定位方法,包括以下步骤:
步骤1)设定在无线传感器网络的接收信号强度(RSS)信息与到达时间(TOA)信息定位中包含N个定位锚节点s
m
n
其中,m
步骤2)将所述定位锚节点的RSS信息模型转变为伪线性形式,TOA信息模型转变为线性形式,再使用加权最小二乘法准则(WLS),构建关于联合RSS测量信息以及TOA测量信息的目标函数优化方程,具体为:
首先分离出RSS信息的噪声测量误差
a
对其进行伪线性化处理,得到关于RSS信息的噪声测量误差的伪线性表达式:
α
其中,各个等价参数分别为
针对误差量,关于RSS信息下待定位目标源的LS估计为:
同理,分离出TOA信息的距离测量误差为:
b
针对该线性表达式,得到TOA信息下待定位目标源的LS估计为:
结合分离出来的RSS和TOA的LS估计,得到如下联合RSS测量信息以及
TOA测量信息的目标函数优化方程:
步骤3)利用凸优化技术将目标函数优化方程转化为约束情况下的目标函数
优化问题,从而求解关于x的非凸定位问题,具体为:
引入两个松弛辅助变量,t
(n
由此可以得到一个非凸约束条件的优化问题
步骤4)针对优化问题中约束条件是非凸的情况,利用半正定松弛最终构建
关于半正定规划SDP联合RSS和TOA定位方法,具体为:
首先,由于公式(10)中待定目标源变量的一次项与二次项均是非凸非线性的,故对x的一次项进行凸松弛,并将x的二次项改写为线性的矩阵表达式,由此得到关于非凸的约束条件的松弛变量表达式:
||x-s
||x-s
其中,r
然后,将所引入的半正定松弛变量表达式(11)、(12)代入原始的非凸约束条件中进行线性展开,由此表达式(10)中非凸的约束条件可以半正定转化为如下仿射约束条件:
n
β
联合上述公式(11)、(12)、(13)、(14)的凸的约束条件,最终可以得到如下的半正定规划问题:
步骤5)仅需要通过使用内点法求解上述半正定规划表达式,就可以快速的计算出待定位目标源x的位置坐标。
本发明的发明原理为:
首先,该算法通过联合RSS信息与TOA信息克服了RSS长距离定位和TOA短距离定位性能较差的缺点,其整体精度始终要优于单独使用TOA的算法或者是RSS的算法,此外,针对以往基于最大似然估计准则原理或者最小二乘估计准则原理的算法求解定位问题精度不足的问题,在本发明中,通过利用加权最小二乘法(WLS)估计准则,再利用半正定规划技术推导了一个新颖的凸优化SDP定位算法,其具有更好的鲁棒性,使得该算法可以达到最小二乘估计问题的全局最优点,以此找到更精确的目标节点位置,仿真结果表明其具有较好的定位精度。
本发明的有益效果为:
本发明在无线传感器网络定位中利用RSS和TOA噪声测量模型构建出目标定位方程,再利用半正定规划技巧,推出了一个联合RSS和TOA的SDP定位方法。通过采用联合RSS和TOA噪声测量模型的方法,相对于单独的RSS定位或者是TOA定位,其可以提高无线传感器网络中传感器节点信息的利用效率,从而克服了RSS和TOA定位易受环境中噪声的影响的缺点,提高了定位精度。
此外,以往基于最大似然估计准则原理或者最大似然估计准则原理的算法在求解RSS和TOA噪声测量模型时,往往利用的是非线性优化的算法,其本身就达不到求解定位问题的全局最优解,会造成估计误差较大的问题,而在本发明中,利用加权最小二乘法(WLS)估计准则,联合RSS和TOA噪声测量模型,由此利用半正定规划技术推导了一个新颖的凸优化SDP定位算法,通过引入关于待定位目标源x的半正定松弛条件以及待定位目标源x的二次项的线性表达式条件提升了该优化问题的凸性,并在此基础上将原始非凸的约束条件转化为仿射约束条件,进一步提高了原始定位问题的鲁棒性与松弛性,可以达到求解定位问题中的全局最优解,由此降低了定位误差,仿真表明其相比其他算法也具有较低的平均定位误差(ALE),有较好的理论和实际意义,在实际的传感器网络定位中具有一定的参考价值。
附图说明
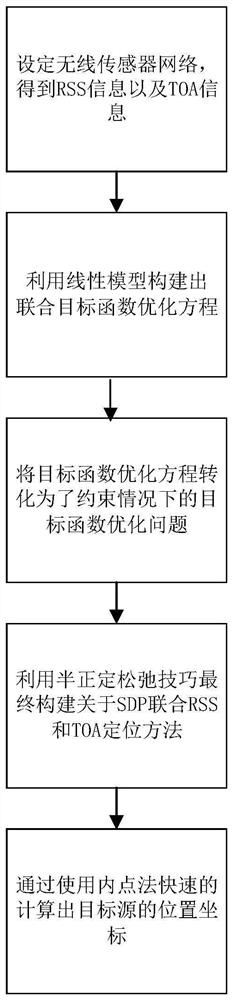
图1是本发明的一种半正定规划的RSS-TOA联合定位方法流程图;
图2是按照本发明算法与其它两种定位方法的平均定位误差随噪声变化情况对比图;
图3是按照本发明算法与其它两种定位方法的平均定位误差随锚节点数目变化情况对比图;
图4是按照本发明算法的平均定位误差随定位边界宽度变化情况对比图。
具体实施方式
下面结合附图和具体实施例对本发明做进一步说明。
如图1为本申请实施例提供的一种半正定规划的RSS-TOA联合定位方法的流程图,该定位算法包括如下步骤:
步骤1)设定在无线传感器网络的接收信号强度(RSS)信息与到达时间(TOA)信息定位中包含N个定位锚节点s
m
n
其中,m
步骤2)将所述定位锚节点的RSS信息模型转变为伪线性形式,TOA信息模型转变为线性形式,再使用加权最小二乘法准则(WLS),构建关于联合RSS测量信息以及TOA测量信息的目标函数优化方程,具体为:
首先分离出RSS信息的噪声测量误差
a
对其进行伪线性化处理,得到关于RSS信息的噪声测量误差的伪线性表达式:
α
其中,各个等价参数分别为
针对误差量,关于RSS信息下待定位目标源的LS估计为:
同理,分离出TOA信息的距离测量误差为:
b
针对该线性表达式,得到TOA信息下待定位目标源的LS估计为:
结合分离出来的RSS和TOA的LS估计,得到如下联合RSS测量信息以及TOA测量信息的目标函数优化方程:
步骤3)利用凸优化技术将目标函数优化方程转化为约束情况下的目标函数优化问题,从而求解关于x的非凸定位问题,具体为:
引入两个松弛辅助变量,t
(n
由此可以得到一个非凸约束条件的优化问题
步骤4)针对优化问题中约束条件是非凸的情况,利用半正定松弛最终构建关于半正定规划SDP联合RSS和TOA定位方法,
首先,引入关于非凸的约束条件的松弛变量表达式
||x-s
||x-s
其中,r
然后将表达式(10)中非凸的约束条件半正定转化为如下仿射约束条件:
n
β
联合上述公式(11)、(12)、(13)、(14)的凸的约束条件,最终可以得到如下的半正定规划问题:
步骤5)仅需要通过使用内点法求解上述半正定规划表达式(15),就可以快速的计算出待定位目标源x的位置坐标。
图2是对25米的平面区域内未知的目标源节点进行仿真定位的性能图。从图2可以看出,当噪声标准差数目从1dB增加到6dB时,SDP算法的平均定位误差从1.6m增加到6.6m,而TSLS算法的平均定位误差从3.8m增加到7.9m,RBFT的平均定位误差从4.0m到10m,这说明随着噪声标准差的变大,三种算法的平均定位误差都会变大,而SDP算法的定位精度始终要优于TSLS算法和RBFT算法。
图3是对25米的平面区域内未知的目标源节点进行仿真定位的性能图。从图3中可以看出,当边界宽度和噪声标准差一定时,三种算法的平均定位误差均随着锚节点数目的增加而逐渐减小,且在锚节点数目变得很多的时候,平均定位误差的变化趋势逐渐趋于平稳。这主要是由于锚节点的增多使得未知节点能够得到更多的RSS和TOA信息,从而使得定位误差减小,而当布置传感器数目较多的时候,RSS和TOA信息趋于饱和,这种变化趋势也会趋于平稳。最后,SDP算法的平均定位误差也始终要低于TSLS算法和RBFT算法。
图4是对联合SDP定位方法与仅使用RSS的SDP算法与仅使用TOA的SDP算法随定位边界宽度变化的平均定位误差的性能对比图。可以观察到RSS-TOA的联合定位算法的平均定位误差要低于单独使用RSS的算法以及单独使用TOA的算法。与此同时,随着仿真环境中设定的定位宽度的增加,所有算法的平均定位误差都会变大。此外,值得注意的是,单独使用RSS算法的平均定位误差在定位环境的边界宽度较小的情况下与联合RSS-TOA测量的性能更接近,单独使用TOA测量的算法在边界范围较大的情况下与联合RSS-TOA测量的性能更接近,而联合RSS-TOA克服了RSS长距离定位和TOA短距离定位性能较差的缺点,其整体精度始终要优于单独使用TOA的算法或者是RSS的算法。
以上结合本发明的具体实施例对本发明方案进行了详细说明,但本发明并不局限于上述实施例,在不脱离本申请的权利要求的精神和范围情况下,本领域的技术人员可做出各种修改或改进。