转向柱能量吸收位移限制器
文献发布时间:2024-01-17 01:19:37
相关申请的交叉引用
本申请要求享有于2022年1月31日提交的序列号为63/304,994的美国临时专利申请的优先权权益,其公开内容以援引方式整体纳入本文。
技术领域
本文中描述的实施例涉及交通工具(vehicle,车辆)转向系统,并且更特别地涉及一种转向柱能量吸收位移限制器。
背景技术
交通工具(诸如汽车、卡车、运动型多用途车、跨界车、小型货车、船舶、飞机、全地形车、休闲车或其他合适的交通工具)包括各种转向系统方案,例如线控转向和驾驶员界面转向。这些转向系统方案通常包括转向柱,用以将转向输入转化为与转向联动装置相互作用的输出,以最终导致车轮(或其他元件)使该交通工具转向。某些转向柱能在多个位置之间进行轴向调节。在过去,能进行轴向调节的转向柱的功能在于提供手轮(hand wheel,方向盘)位置的灵活性,且还利于为不同身材的驾驶员提供更舒适的驾驶位置。但是,现在有机会实现大得多的伸缩行程,这也可以称为收纳(stow,收合)行程(即,当不需要手轮时)。例如可以将手轮重新定位在离驾驶员更远之处以允许他/她去做操作车辆/交通工具以外的事情,诸如在交通工具停泊时使用膝上型电脑做事。其他示例包括具有自动驾驶能力的交通工具,使得当交通工具处于自动驾驶模式时可以将手轮收纳。
某些转向柱需要将总能量吸收轴向位移距离(本文中也称为“行程距离”)限制于一个限定的位移。这通常例如是通过转向柱中的一个固定几何形状的部分(诸如停止上护套运动的固定铸造特征部)进行的。当处理“能收纳”的转向柱时,则另有具复杂性。当与期望的能量吸收行程距离相比时,可用的转向柱护套收纳/伸缩行程要大得多。传统上,不可收纳型转向柱的能量吸收行程大于转向柱的伸缩行程。在正常收纳起作用期间,护套必须能够行进通过能量吸收行程区域,但是固定的限制器特征的实施具有挑战性。
要求限制能量吸收行程的现有的能收纳柱使用火工销延伸装置(pyrotechnicpin-extension device),其在能量吸收事件中将运动限制销延伸到行进的上护套的路径中。火工装置是专业化的且需要与交通工具相互作用,以将柱安置于能量吸收模式/配置中。火工装置具有专业化的运输考虑,需要监控和专门的仓储,并且成本高。
发明内容
根据本公开的一个方面,一种转向柱组件包括伸缩式驱动支架。该转向柱组件还包括被操作性地联接到伸缩式驱动支架的第一护套。该转向柱组件进一步包括第二护套,其中第一护套能相对于第二护套以伸缩方式移动。该转向柱又进一步包括具有凸轮部分和阻挡部分的叠缩限制特征部(collapse limiting feature,塌缩限制特征),其中阻挡部分限定第一护套在第一位置中的第一行进范围,其中伸缩式驱动支架与凸轮部分之间的接触使阻挡部分偏离出第一护套路径,以允许第一护套具有更大的第二行进范围。
根据本公开的另一个方面,一种转向柱组件包括第一护套。该转向柱组件还包括第二护套。该转向柱组件进一步包括第三护套,其中第一护套和第三护套能相对于彼此以及相对于第二护套以伸缩方式移动。该转向柱组件又进一步包括具有凸轮部分和阻挡部分的叠缩限制特征,其中阻挡部分限定所述第一护套在第一位置中的第一行进范围,其中第三护套与凸轮部分之间的接触使阻挡部分偏离出第一护套路径,以允许第一护套具有更大的第二行进范围。
这些和其他的优点及特征将从结合附图的以下描述中变得更加明显。
附图说明
被视为本发明的主题在随附于本说明书的权利要求书中被特别指出并被明确要求保护。本发明的上述及其他特征和优点从下面结合附图的详细描述而变得明显,在图中:
图1大体绘示了一种具有根据本公开原理的转向系统的交通工具;
图2是根据一实施例的具有三个或更多个护套的转向柱组件;
图3A至图3D绘示了图2的转向柱组件在收纳模式下的运动期间的一系列位置;
图4A至图4C绘示了图2的转向柱组件在能量吸收模式下的运动期间的一系列位置;
图5是根据具有两个护套的一实施例的转向柱组件的正视图;
图6A至图6C绘示了图5的转向柱组件在收纳模式下的运动期间的一系列位置;以及
图7A和图7B绘示了图5的转向柱组件在能量吸收模式下的运动期间的一系列位置。
具体实施方式
以下讨论旨在本公开的各种实施例。尽管这些实施例中的一个或多个可能比其他实施例讨论和/或说明得更为详细,但是所公开的实施例不应被解释为或以其他方式用于限制本公开(包括权利要求)的范围。另外,本领域技术人员将理解的是,以下描述具有广泛的应用,并且任何实施例的讨论只是为了对该实施例进行说明,而非旨在暗示本公开(包括权利要求)的范围被受限于该实施例。
如所描述的,交通工具(诸如汽车、卡车、运动型多用途车、跨界车、小型货车、船舶、飞机、全地形车、休闲车或其他合适的交通工具)包括各种转向系统方案,例如线控转向和驾驶员界面转向。这些转向系统方案通常包括转向柱,用以将转向输入转为与转向联动装置相互作用的输出,以最终导致车轮(或其他元件)使交通工具转向。某些转向柱能在多个位置之间进行轴向调节。在过去,能进行轴向调节的转向柱的功能在于提供手轮位置的灵活性,且还利于为不同身材的驾驶员提供更舒适的驾驶位置。然而,现在有机会进行大得多的伸缩行程,其也可以称为收纳行程(即,当不需要手轮时)。例如可以将手轮重新定位到完全远离驾驶员之处以允许他/她做操作交通工具之外的事情,诸如在交通工具停泊时在膝上型电脑上工作。其他示例包括具有自动驾驶能力的交通工具,使得当交通工具处于自动驾驶模式时,手轮可被收纳。
现在参照附图,其中展示和描述了各种实施例,但并非对其进行限制,图中示出了容纳能量吸收组件的能轴向调节的转向柱组件的实施例。轴向可调节性可以由允许其间进行轴向运动的两个或更多个转向柱部分(例如护套、支架、导轨和/或类似物)之间的相对运动来产生。例如第一部分和第二部分(以及可能的第三部分)以相对伸缩、滑动或平移运动进行调节。
首先参照图1,其大体示出了根据本公开的原理的交通工具20。该交通工具20可以包括任何合适的交通工具,诸如汽车、卡车、运动型多用途车、小型货车、跨界车、任何其他客运交通工具、任何合适的商用交通工具或任何其他合适的交通工具。虽然交通工具20可以是具有车轮并在道路上使用的客运交通工具,但是本公开的原理可以应用于其他交通工具,诸如飞机、拖拉机、船舶或其他合适的交通工具。交通工具20可包括推进系统30,例如点火系统(ignition system)、电子系统或其组合。
在一些实施例中,交通工具20还可以包括转向系统40。该转向系统40可以被配置为驾驶员界面转向系统、自主驾驶系统或允许驾驶员界面和自主转向二者的系统。该转向系统可以包括输入装置42(诸如方向盘),其中驾驶员可以通过转动方向盘以机械方式提供转向输入。该转向柱组件44包括转向柱45,该转向柱45沿着从输入装置42到输出组件46的轴线延伸。输出组件46可包括小齿轮轴组件(pinion shaft assembly)、I型轴(I-shaft,中间轴)、万向节、线控转向部件或传统上相对于输入装置42定位的任何特征。
转向柱45可以包括至少两个能轴向调节的部分,例如相对于彼此能轴向调节的上护套48和下护套50。所述至少两个能轴向调节的部分可以进一步包括设置在上护套48与下护套50之间的至少一个中间护套49。该轴向运动可以包括滑动、伸缩、平移、其他轴向运动或其组合。转向柱组件44可以包括不同于护套48、49、50的部件,诸如安装支架、动力辅助壳体、输出组件、转向齿轮组件、本体结构的部件和/或另外的部件。轴向致动器组件52可以被设置用以致动上护套48(且在一些实施例中为中间护套49)相对于下护套50的轴向调节。
转向齿轮组件54可以经由转向齿轮输入轴56连接到输出组件46。转向齿轮组件54可以被配置为齿条-小齿轮传动装置(rack-and-pinion)、循环球型转向齿轮、或与自主和驾驶员界面转向系统相关联的任何其他类型的转向齿轮装置。转向齿轮组件54随后可以经由输出轴60连接到驱动轴58。输出轴60被能操作地连接到转向齿轮组件54,使得转向齿轮输入轴56的旋转导致输出轴60的响应运动并且导致驱动轴使车轮62转向。
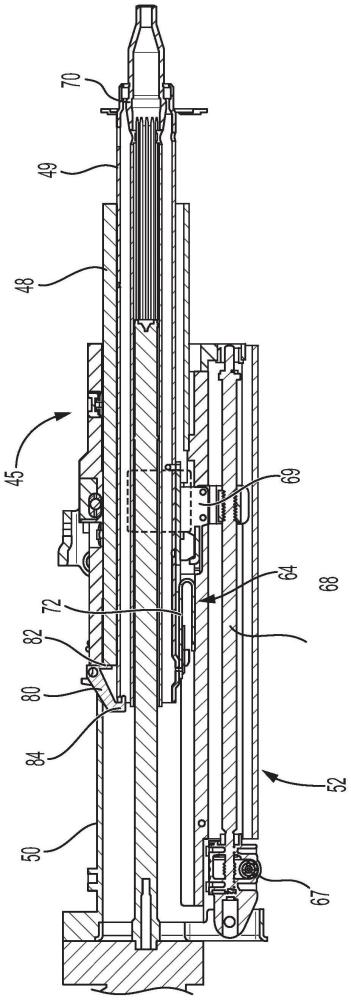
现在参照图2,其更详细地阐示了转向柱45的“三护套”实施例。特别地,转向柱45包括上护套48、中间护套49和下护套50。转向轴70被定位在上护套50内,并且可以具有连接到其一端的转向输入装置42。如本文中所述,上护套48能相对于中间护套49和下护套50轴向调节。中间护套49还能相对于下护套50轴向调节。该轴向能调节性允许在正常手动驾驶模式的轴向范围(可称为“舒适范围”)中运动。在舒适范围中,通过能量吸收系统64进行能量吸收是期望的并且是可行的。轴向能调节性还允许从转向柱45的伸出位置移离并到达可被称为“收纳”位置范围的缩回位置范围的运动。在某些实施例中,中间护套49和上护套48能缩回到将这些护套48、49中的每一者完全地或基本完全地定位在下护套50内(即,齐平)的程度。例如,在自动驾驶期间将输入装置42置于收纳位置可能是有益的。
在操作中,轴向致动器组件52在上护套48、中间护套49和下护套50之间实现轴向运动,以便在伸出位置、缩回位置和任何中间位置之间进行调节。轴向致动器组件52包括电机67,该电机被操作性地联接到导螺杆68以驱动导螺杆68旋转。具有螺母特征(部)的伸缩式驱动支架69与导螺杆68的外表面螺纹接合,使得导螺杆68的旋转导致伸缩式驱动支架69沿着导螺杆68轴向运动。伸缩式驱动支架69被操作性地联接到上护套48,以相对于下护套50而沿轴向驱动上护套48。上护套48与中间护套49的联接关系也提供了中间护套49的轴向运动。上护套48和伸缩式驱动支架69的操作联接可以被直接或间接地实现。在一个示例中,一个或多个机械紧固件(例如螺栓)可以将伸缩式驱动支架69联接到上护套48。在另一个非限制示例中,伸缩式驱动支架69可以利用摩擦夹具或类似物操作性地联接到上护套48。前面的示例仅仅是说明性的,也可以预期到其他联接组件。
能量吸收系统64被联接到上护套48,并且在上护套48正常轴向运动期间随上护套48一起进行轴向平移。但是,在能量吸收是有益的碰撞事件期间,随着上护套48从伸出位置朝向缩回位置快速移动,能量吸收系统64展开(unroll,解卷)一能量吸收条72以吸收碰撞能量。当上护套48处于舒适范围内时,通过能量吸收系统64进行能量吸收是有益的,但是在碰撞事件期间期望上护套48仅在一定范围叠缩(collapse,套缩)/行进。本文公开的实施例限制该叠缩运动,但是允许用于收纳转向柱45的全范围的轴向行进。
如图所示,叠缩限制特征部80被操作性地联接到下护套50,但也可以设想到叠缩限制特征部80被操作性地联接到另一结构。叠缩限制特征部80被示出为机械钩,该机械钩能围绕叠缩限制特征部80联接到下护套50的一轴线枢转,但要理解的是,可以利用具有不同几何形状的其他机械特征。叠缩限制特征部80被设置在上护套48的路径中,以便在碰撞事件期间在能量吸收行程之后阻止上护套48运动,但是允许在正常收缩/收纳操作期间经由上护套48和中间护套49的收缩运动而收纳整个转向柱。因此,叠缩限制特征部80提供了一种依赖于转向柱45的操作状态来操作的双模式组件。具体而言,在收纳/伸缩功能期间启用一种操作状态,而在能量吸收功能期间启用一单独的操作状态。
对于叠缩限制特征部80的能枢转型实施例,扭簧与叠缩限制特征部80接触以将叠缩限制特征部80以旋转方式偏压到第一护套路径中。对于叠缩限制特征部80的能至少部分平移的实施例,能够线性偏压的其他类型的弹簧与叠缩限制特征部80接触,以便将叠缩限制特征部80偏压到第一护套路径中。
图3A至图3D绘示了在伸缩/收纳模式期间转向柱45的移动。特别地,当从转向柱45的伸出位置(图3A)移动时,中间护套49接触叠缩限制特征部80的凸轮部分82,由此将叠缩限制特征部80旋转到不阻止上护套48进一步伸缩运动(图3B和图3C)的位置。所以,上护套48和中间护套49自由伸缩到完全收纳位置(图3D)。虽然示出了叠缩限制特征部80的旋转,但是应理解,凸轮部分82可以是导致叠缩限制特征部80的平移或平移和旋转的组合的斜坡部(ramp,倾斜段)。
图4A至图4C绘示了能量吸收模式期间转向柱45的移动。特别地,当从转向柱的伸出位置(图4A)移动时,上护套48与伸缩式驱动支架69机械脱接,并且相对于静止的中间护套49移动(图4B)。由于相对于伸缩式驱动支架69而在上护套48上施加了足够的力,因此上护套48与伸缩式驱动支架69会脱接(脱离联接)。在一些实施例中,由于两个部件之间的螺栓连接部(或其他机械紧固件)的剪断而可能会发生脱接。其他实施例可能需要伸缩式驱动支架69相对于摩擦夹具或类似物进行滑动。如上文所讨论,上护套48和伸缩式驱动支架69的其他联接组件是可预期的并完全处于本文公开的实施例的范围内。这种替代的联接将需要替代的脱离联接过程,但是并不会限制本公开。在中间护套49与叠缩限制特征部80的凸轮部分82之间的接触并未将叠缩限制特征部80偏压出上护套48的路径的情况下,上护套48被叠缩限制特征部80的钩84(或通常称为“阻挡部分”的其它障碍物)阻挡,以在碰撞事件期间限定一位移限制(图4C)。
现在参照图5,其中转向柱的“两护套”实施例被更详细地阐示并用附图标记145表示。特别地,转向柱145包括上护套148和下护套150。转向轴170被定位在上护套150内并且可以具有连接到其一端的转向输入装置42。如本文中所述,上护套148相对于下护套150是能轴向调节的。能轴向调节性允许在正常手动驾驶模式轴向范围(可称为“舒适范围”)上移动。在该舒适范围上,通过能量吸收系统164进行能量吸收是期望的并且是可行的。所述“能轴向调节性”还允许从转向柱145的伸出位置移离并到达可被称为“收纳”位置范围的缩回位置范围。在一些实施例中,上护套148能被缩回上护套148到完全地或基本完全地定位在下护套150内(即,齐平)的程度。例如在自动驾驶期间将输入装置42置于收纳位置可能是有益的。
在操作中,轴向致动器组件52在上护套148与下护套150之间实现轴向运动,以便在伸出位置、缩回位置和任何中间位置之间进行调节。如结合“三护套”实施例所述的,轴向致动器组件52包括被操作性地联接到导螺杆68以驱动导螺杆68旋转的电机67。具有螺母特征部(nut feature)的伸缩式驱动支架69与导螺杆68的外表面螺纹接合,使得导螺杆68的旋转导致伸缩式驱动支架69沿着导螺杆68轴向运动。伸缩式驱动支架69被操作性地联接到上护套148,以相对于下护套150而沿轴向驱动上护套148。上护套148与伸缩式驱动支架69的操作性联接可以被直接或间接地实现。在一个示例中,一个或多个机械紧固件(例如螺栓)可以将伸缩式驱动支架69联接到上护套148。在另一个非限制示例中,伸缩式驱动支架69可以利用摩擦夹具或类似物而操作性地联接到上护套148。前面的示例仅仅是说明性的,也可以预期到其他联接组件。
如结合“三护套”实施例所述,在上护套148正常轴向运动期间,能量吸收系统64被联接到上护套148并且随着上护套148一起轴向平移。但是,在能量吸收为有益的碰撞事件期间,随着上护套148从伸出位置朝向缩回位置快速移动,能量吸收系统64展开一能量吸收条72以吸收碰撞能量。当上护套148处于舒适范围内时,通过能量吸收系统64进行能量吸收是有益的,但是在碰撞事件期间期望上护套148仅在一定范围叠缩/行进。本文公开的实施例限制这种叠缩运动,但是允许用于收纳转向柱145的全范围的轴向行进。
现在参照图6A至图6C,叠缩限制特征部180被操作性地联接到下护套150,但可以设想到的是,叠缩限制特征部180被操作性地联接到另一结构。叠缩限制特征部180被示出为机械钩,该机械钩能绕叠缩限制特征部80联接到的下护套150的一轴线枢转,但要理解的是,可以利用具有不同几何形状的其他机械特征。叠缩限制特征部180被设置在上护套148的路径中,以便在碰撞事件期间在能量吸收行程之后阻止上护套148的运动,但是允许在正常收缩/收纳操作期间通过上护套148的收缩运动动收纳整个转向柱。因此,叠缩限制特征部180提供了一种依赖于转向柱145的操作状态来操作的双模式组件。具体而言,在收纳/伸缩功能期间启用一种操作状态,而在能量吸收功能期间启用一单独的操作状态。
对于叠缩限制特征部180的能枢转型的实施例,扭簧与叠缩限制特征部180接触以将叠缩限制特征部180以旋转方式偏压到第一护套路径中。对于叠缩限制特征部180的能至少部分平移的实施例,能够进行线性偏压的其他类型的弹簧与叠缩限制特征部180接触,以便将叠缩限制特征部180偏压到第一护套路径中。
图6A至图6C绘示了在伸缩/收纳模式期间转向柱145的移动。特别地,当从转向柱145的伸出位置(图6A)移动时,伸缩式驱动支架69接触叠缩限制特征部180的凸轮部分182,由此将叠缩限制特征部180旋转到不会阻止上护套148进一步伸缩运动(图6B)的位置。因此,上护套148自由伸缩到完全收纳位置(图6C)。虽然示出了叠缩限制特征部180的旋转,但应理解的是,凸轮部分182可以是导致叠缩限制特征部180的平移或平移与旋转的组合的斜坡部。
图7A和图7B绘示了能量吸收模式期间转向柱145的两护套实施例的移动。特别地,当从转向柱145的伸出位置(图7A)移动时,上护套148与伸缩式驱动支架69机械脱接,并且其行程与伸缩式驱动支架69无关。由于相对于伸缩式驱动支架69而在上护套148上施加了足够的力,上护套148与伸缩式驱动支架69发生脱接。在一些实施例中,由于两个部件之间的螺栓连接部(或其他机械紧固件)的剪断而可能会发生脱接。其他实施例可能需要伸缩式驱动支架69相对于摩擦夹具或类似物进行滑动。如上文所讨论的,上护套148和伸缩式驱动支架69的其他联接组件被预期并且完全处于本文公开的实施例的范围内。这种替代的联接将需要替代的脱接过程,但不会限制本公开。在伸缩式驱动支架69与叠缩限制特征部180的凸轮部分182之间的接触并未使叠缩限制特征部180偏离出上护套148的路径的情况下,上护套148被叠缩限制特征部180的钩184(或通常称为“阻挡部分”的其它障碍物)阻挡,以限定一位移限制(图7B)。
本文公开的实施例提供了一种装置80、180,用于一旦已经达到规定的行程距离时阻止转向柱45、145的能量吸收运动。装置80、180通过伸缩/收纳部件的运动而被以机械方式致动成接合和脱离接合。该装置在正常操作条件下提供无阻碍收纳/伸缩致动,但是一旦柱的能量吸收功能被占用和耗尽,则阻挡行进并阻止运动。
虽然仅结合有限数量的实施例详细描述了本发明,但容易理解的是,本发明不限于这些公开的实施例。而是,本发明可以被修改为包含虽在此前未描述但与本发明的构思和范围相称的任何数量的变化、改变、替换或等同布置。另外,虽然已经描述了本发明的各种实施例,但应理解的是,本发明的多个方面可以仅包括所描述的实施例中的一些。此外,任何一个实施例的任何特征、元件、部件或优点可以用在任何其他实施例上。因此,本发明不应被视为受到前述说明的限制。