一种调节滚动轴承径向支承刚度的轴承游隙选取方法
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及滚动轴承动力学优化设计领域,具体涉及一种调节滚动轴承径向支承刚度的轴承游隙选取方法。
背景技术
健康轴承对其支承系统振动特性的影响主要体现在弹性支承和VC时变激励两个方面(Harris,2001;罗继伟,罗天宇,2009)。传统上认为,由于滚动轴承滚动体与滚道之间的赫兹接触静力变形关系(其中赫兹点接触为3/2次幂非线性,赫兹线接触为10/9次幂非线性),滚动轴承的刚度具有硬弹簧支承特性(Erwin,2001)。近年来,国内外研究者们陆续发现滚动轴承系统的动态支承刚度可能还包括软弹簧支承乃至软、硬弹簧支承特征共存的行为(Ehrich,1992;Zhang et al.,2015a)。支承刚度非线性带来的滞后共振特性影响轴承甚至整个转子系统的运行稳定性、按全性和寿命,因此评估和调节轴承的刚度特性是实际工程系统的必备环节。
轴承游隙作为滚动轴承生产、安装和工作过程中的一个基本品控参数。Oswald等人研究发现在较小的负工作游隙下,滚动轴承寿命可以最大化(Oswald et al.,2012)。Zhang等采用两自由度球轴承模型发现合理的选取轴承工作游隙能够有效的调节轴承变柔度振动共振的幅度、触发位置和非线性滞后特性,随后Jin等实验验证了上述研究结果(Zhang et al.,2015b;Jin et al.,2017)。另外,在精密机床加工或高速航空工业领域,通常认为调整滚动轴承到零乃至偏负工作游隙可提高轴承支承刚度的同时降低轴承调动(run-out)带来的振动和噪声行为(Harnoy,2002)。显然,调节轴承游隙对轴承支承刚度大小及其软、硬非线性弹簧特征具有显著的调节作用。由于滚珠轴承包含赫兹接触、轴承游隙和时变柔度参激等多种非线性因素,使得厘清滚动轴承支承刚度非线性特征与轴承游隙参数影响的动力学规律极其困难。谐波平衡-频/时转换(HB-AFT)方法利用AFT时域离散化技术,能够快速得到非线性项的频域信息,进而完成非线性系统的谐波平衡过程,实现对一般非线性系统稳态谐波响应的求解。一方面,张智勇和陈予恕将同伦延拓技术嵌入HB-AFT方法,结合Hsu求解Floquet单值矩阵的离散方法,能够快速并自动追踪滚动轴承系统的幅频响应曲线(张智勇,陈予恕,2014)。另一方面,按照非线性振动基础知识,根据系统主共振幅频响应曲线的软/硬滞后特征可以判定系统支承刚度特性(Kovacic,2011)。两方面结合,使得基于HB-AFT方法所得滚动轴承主共振幅频响应曲线滞后特性,定量选取轴承工作游隙来调节轴承支承刚度特性的策略成为可能。
发明内容
本发明的目的在于提供一种调节滚动轴承径向支承刚度的轴承游隙选取方法。
实现本发明目的的技术解决方案为:一种调节滚动轴承径向支承刚度的轴承游隙选取方法,包括以下步骤:
步骤1、获取滚动轴承几何尺寸、滚珠个数、接触刚度、等效阻尼这些基本参数;
步骤2、将步骤1滚动轴承基本参数输入两自由度滚动轴承变柔度振动方程,建立滚动轴承系统径向变柔度振动动力学模型;
步骤3、采用谐波平衡-频/时转换法求解步骤2中滚动轴承系统径向变柔度振动动力学模型,得到变柔度振动主共振幅频响应曲线,并判断系统的主共振位置;
步骤4、根据步骤3所得变柔度振动主共振幅频响应曲线的几何特征,判断现阶段滚动轴承支承刚度特征;
步骤5、结合滚动轴承系统实际工况要求,确定滚动轴承理想支承刚度特征;
步骤6、根据步骤4所得现阶段滚动轴承支承刚度特征,调增或调减轴承径向工作游隙,实现步骤5要求的滚动轴承理想支承刚度。
进一步的,步骤2中,将步骤1滚动轴承基本参数输入两自由度滚动轴承变柔度振动方程,建立滚动轴承系统径向变柔度振动动力学模型:
且
δ
θ
Ω=ω
式(1)至(5)中x、y为系统两自由度方向径向位移;F
进一步的,步骤3中,采用谐波平衡-频/时转换法求解步骤2中滚动轴承系统径向变柔度振动动力学模型,得到变柔度振动主共振幅频响应曲线,具体方法为:
步骤3.1、引入无量纲时间τ=N
步骤3.2、将方程(6)插入滚动轴承系统径向变柔度振动动力学模型,谐波平衡得如下非线性代数关系式:
g(P,Q,Ω)=0 (7)
其中谐波系数以P、Q表述为
步骤3.3、首先采用逆离散Fourier变换得到未知响应X的时域离散信息,再利用离散Fourier变换得到非线性力F的频域信息Q,经此建立由P表示的Q的形式:
式中,P
步骤3.4、采用Newton-Raphson迭代求解式(7)的P,进而求得系统变柔度振动主共振幅频响应曲线A(P,Ω),其中幅值A是由P和Ω表示的函数关系式。
进一步的,步骤4中,根据步骤3所得变柔度振动主共振幅频响应曲线的几何特征,判断现阶段滚动轴承支承刚度特征,具体方法为:
根据非线性振动基础知识,当滚动轴承变柔度振动主共振幅频响应曲线向左倾斜时,判定轴承支承刚度为软弹簧支承特征;当滚动轴承变柔度振动主共振幅频响应曲线向右倾斜时,判定轴承支承刚度为硬弹簧支承特征;当滚动轴承变柔度振动主共振幅频响应曲线未发生明显倾斜,即倾斜度小于设定阈值时,判定轴承支承刚度为准线性弹簧特征。
进一步的,步骤5中,结合滚动轴承系统实际工况要求,确定滚动轴承理想支承刚度特征,具体方法为:
根据实际工况,确定滚动轴承理想支承刚度特性的基本要求,如要求降低系统共振频率,则滚动轴承理想支承刚度特征为软弹簧支承特征;如要求提高系统共振频率,特别是增加支承刚性,则滚动轴承理想支承刚度特征为硬弹簧支承特征;如要求避免非线性支承带来的非线性振动和噪声行为,则滚动轴承理想支承刚度特征为准线性弹性支承特征。
进一步的,步骤6中,根据步骤4所得现阶段滚动轴承支承刚度特征,调增或调减轴承径向工作游隙,实现步骤5要求的滚动轴承理想支承刚度,具体方法为:
步骤6.1、对比步骤4所得现阶段滚动轴承支承刚度特征和步骤5要求的滚动轴承理想支承刚度,当现阶段滚动轴承支承刚度特征满足步骤5确定的轴承理想支承刚度特征的要求时,不需要调整;当现阶段轴承刚度比理想轴承刚度偏软时,调减轴承径向游隙使滚动轴承径向刚度变硬;当现阶段轴承刚度比理想轴承刚度偏硬时,调增轴承径向游隙使滚动轴承径向刚度变软;
步骤6.2、重新根据步骤3、步骤4计算并判断系统调节后的轴承支承刚度特征,并转至步骤6.1对比步骤4所得现阶段滚动轴承支承刚度特征和步骤5要求的滚动轴承理想支承刚度,调整轴承径向游隙,直至满足步骤5确定的轴承理想支承刚度特征情形,调整完毕。
一种调节滚动轴承径向支承刚度的轴承游隙选取系统,基于任一项所述的方法实现轴承游隙选取。
一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时,基于任一项所述的方法实现轴承游隙选取。
一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,基于任一项所述的方法实现轴承游隙选取。
本发明与现有技术相比,其显著优点为:1)本发明基于谐波平衡-频/时转换方法,通过两自由度滚动轴承模型的计算分析,可快速分析得到滚动轴承系统的变柔度振动主共振幅频响应曲线,并得到特定工作游隙下轴承支承刚度特性,减少了轴承刚度特征判断的工作量;2)本发明克服了人为主观基于经验调节轴承工作游隙带来的不利影响,基于动力学理论的定量方法提高了轴承刚度特性调节的精度;3)本发明采用的模型与方法与数值仿真结果吻合良好,对实际轴承支承系统刚度的调节乃至振动噪声控制具有重要价值。
附图说明
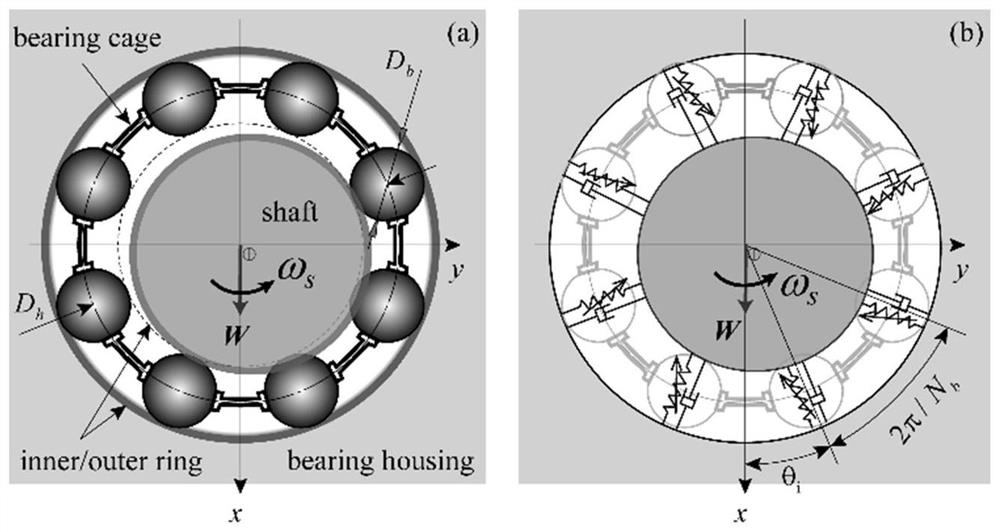
图1是本发明实施例两自由度球轴承变柔度振动动力学模型图,其中(a)是滚动轴承系统,(b)系统两自由度弹簧模型。
图2是本发明实施例轴承径向游隙为6.0μm时,系统变柔度振动主共振幅频响应曲线图。
图3是本发明实施例轴承径向游隙在0.2至-0.6μm范围调整时,系统变柔度振动主共振幅频响应曲线图。
图4是本发明实施例轴承径向游隙在-0.6至-1.4μm范围调整时,系统变柔度振动主共振幅频响应曲线图。
图5是本发明实施例轴承径向游隙为-1.2μm,时,系统变柔度振动主共振幅频响应曲线图。
图6是本发明实施例系统变柔度振动主共振幅频响应数值仿真验证瀑布图。
图7是本发明调节滚动轴承径向支承刚度的轴承游隙选取方法流程图。
具体实施方式
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本申请,并不用于限定本申请。
一种调节滚动轴承径向支承刚度的轴承游隙选取方法,包括以下步骤:
步骤1、获取滚动轴承几何尺寸、滚珠个数、接触刚度、等效阻尼这些基本参数;
步骤2、将步骤1滚动轴承基本参数输入两自由度滚动轴承变柔度振动方程,建立滚动轴承系统径向变柔度振动动力学模型为:
且
δ
θ
Ω=ω
步骤3、采用谐波平衡-频/时转换法求解步骤2中滚动轴承系统径向变柔度振动动力学模型的变柔度振动主共振幅频响应曲线,并判断系统的主共振位置,具体为:
步骤3.1、引入无量纲时间τ=N
步骤3.2、将方程(6)插入方程(1),谐波平衡得如下非线性代数关系式:
g(P,Q,Ω)=0 (7)
其中谐波系数以P、Q表述为
步骤3.3、首先采用逆离散Fourier变换得到未知响应X的时域离散信息,再利用离散Fourier变换得到非线性力F的频域信息Q,经此建立由P表示的Q的形式:
式中,P
步骤3.4、采用Newton-Raphson迭代求解式(7)的P,进而求得系统变柔度振动主共振幅频响应曲线A(P,Ω),其中幅值A是由P和Ω表示的函数关系式。
步骤4、根据步骤3所得变柔度振动主共振幅频响应曲线的几何特征,判断滚动轴承支承刚度特征,具体为:
根据非线性振动基础知识,判定滚动轴承支承刚度特征的原则为:
1)滚动轴承变柔度振动主共振幅频响应曲线向左倾斜时,轴承支承刚度为软弹簧支承特征;2)滚动轴承变柔度振动主共振幅频响应曲线向右倾斜时,轴承支承刚度为硬弹簧支承特征;3)滚动轴承变柔度振动主共振幅频响应曲线未发生明显倾斜时,轴承支承刚度可视为准线性弹簧特征。
步骤5、结合滚动轴承系统实际工况要求,确定滚动轴承理想支承刚度特征,具体为:
根据实际工况,确定滚动轴承理想支承刚度特性的基本要求,进一步判定滚动轴承理想支承刚度特征,原则为:
1)为降低系统共振频率,可调节轴承支承刚度具有软弹簧支承特征;2)为提高系统共振频率,特别是增加支承刚性,可调节轴承支承刚度具有硬弹簧支承特征;3)为避免非线性支承带来的非线性振动和噪声行为,可调节轴承支承刚度至准线性弹性支承特征范围。
步骤6、根据步骤4所得现阶段滚动轴承支承刚度特征,调增或调减轴承径向工作游隙,实现步骤5要求的滚动轴承理想支承刚度,具体为:
步骤6.1、对比步骤4所得现阶段滚动轴承支承刚度特征和步骤5要求的滚动轴承理想支承刚度,当现阶段滚动轴承支承刚度特征满足步骤5确定的轴承理想支承刚度特征的要求时,不需要调整;当现阶段轴承刚度比理想轴承刚度偏软时,调减轴承径向游隙使滚动轴承径向刚度变硬;当现阶段轴承刚度比理想轴承刚度偏硬时,调增轴承径向游隙使滚动轴承径向刚度变软;
步骤6.2、重新根据步骤3、步骤4计算并判断系统调节后的轴承支承刚度特征,并转至步骤6.1对比步骤4所得现阶段滚动轴承支承刚度特征和步骤5要求的滚动轴承理想支承刚度,调整轴承径向游隙,直至满足步骤5确定的轴承理想支承刚度特征情形,调整完毕。
本发明还提出一种调节滚动轴承径向支承刚度的轴承游隙选取系统,基于所述的方法实现轴承游隙选取。
一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时,基于所述的方法实现轴承游隙选取。
一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,基于所述的方法实现轴承游隙选取。
实施例
为了验证本发明方法的有效性,进行如下仿真。给定某型JIS6306球轴承具体参数如表1所示。
表1 JIS6306球轴承系统参数
对于如图1所示的两自由度球轴承变柔度振动动力学模型,采用谐波平衡-频/时转换法,快速求得系统变柔度振动主共振的幅频响应曲线随轴承径向工作游隙δ
综上所述,本发明可快速获取滚动轴承系统的变柔度振动主共振幅频响应曲线,进而得到特定工作游隙下轴承支承刚度特性,减少了轴承刚度特征判断的工作量,提高了轴承刚度特性调节的精度,对实际轴承支承系统刚度调节乃至其振动噪声控制具有重要价值。
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。
- 一种调节滚动轴承径向支承刚度的轴承游隙选取方法
- 一种滚动轴承游隙检测装置