一种用于公共区域消毒的智能机器人控制方法及其控制系统
文献发布时间:2023-06-19 12:22:51
技术领域
本发明涉及机器人技术领域,具体为一种用于公共区域消毒的智能机器人控制方法及其控制系统。
背景技术
随着人民生活的不断提高,人们迫切需要社会给他们提供舒适、卫生,免受疾病威胁、保障身心健康的生活活动场所,消毒工作则是改善卫生状况、预防疾病发生与流行的有力保障,因此在公共区域消毒必不可少。
消毒机器人是一种消毒类型的机器人,其内部装置消毒系统产生消毒气体,利用机器人的气动系统将消毒气体快速的在室内空间扩散,增加消毒的覆盖面和均匀性,能有效、无死角地杀灭空气中的致病微生物,消毒机器人能够根据设定的路线自动、高效、精准的对室内进行消毒。
现有的消毒机器人主要运用在室内,在室外难以针对特定环境区域进行消毒,为此我们提出了一种用于公共区域消毒的智能机器人控制方法及其控制系统。
发明内容
针对现有技术存在的上述不足,本发明提供了一种用于公共区域消毒的智能机器人控制方法及其控制系统。
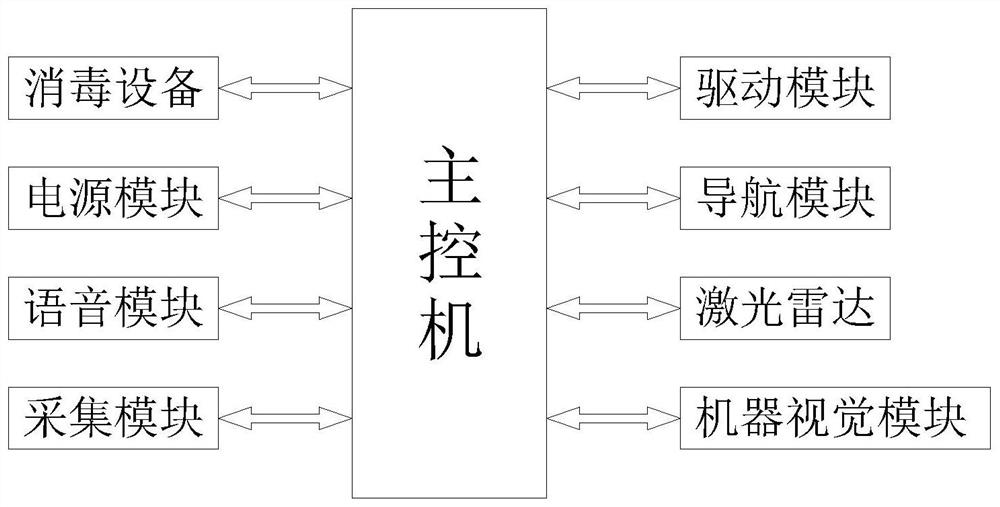
本发明提供如下技术方案:一种用于公共区域消毒的智能机器人控制系统,包括主控机、驱动模块、导航模块、激光雷达、机器视觉模块、消毒设备、电源模块、语音模块和采集模块
所述采集模块与主控机通讯连接,完成机器人自身位姿状态测量;
所述导航模块和激光雷达均与主控机通讯连接,主要用于环境地图构建和导航控制,并根据激光雷达传感器采集周围环境信息数据,以及采集模块采集的机器人运行数据完成环境地图构建;
所述驱动模块与主控机通讯连接,主要负责机器人驱动控制;
所述机器视觉模块与主控机通讯连接,且消毒设备与主控机通讯连接,主要用于对消毒区域的图像采集、处理与分析,并将分析的结果传送给主控机,主控机根据结果控制消毒设备对该区域进行消毒;
所述电源模块与主控机通讯连接,电源模块作为机器人的动力来源,主要将24V电压的转换成不同的电压,为主控机及各个模块供电;
所述语音模块与主控机通讯连接,用于语音提醒,告知消毒区域人员该区域需要进行消毒。
优选的,所述激光雷达激光雷达采集的环境信息与已有的环境信息进行匹配关联,实现机器人精确定位,在坐标系统中,激光雷达数据选用极坐标形式进行表达,其返回的观测数据以测量点的形式表达,以获得准确的位置信息。
优选的,所述采集模块主要包括两个部分,第一部分为加速度计,它主要完成对机器人在参考坐标系下的自身坐标系的X轴、Y轴和Z轴的加速度信号;第二部分为陀螺仪,它主要测量机器人在自身坐标系下的自身坐标系的X轴、Y轴和Z轴的角速度信号。
优选的,所述电源模块通过高速采样电流积分来计算真实电量,相对于电压估算电量更为精确,可实时对电池电量进行监测。
优选的,所述导航模块根据区域并生成环境地图,为机器人提供路径规划,并利用激光雷达对周围环境持续感知,当感知到未知的动态障碍物时,局部路径规划根据感知的障碍物信息,对短期内的运动轨迹进行调整。
优选的,所述机器视觉模块包括图像采集子单元、图像预处理子单元、图像分析子单元三个子单元组成;
相机标定单元主要完成对工业相机的标定,目的是为了确定相机的内外参数及以及相机相对世界坐标系的位置;
图像采集单元主要完成对相机的调用和相机是否正常工作的判断;
图像分析单元主要完成对图像的预处理,以及对图像进行分析获取目标的位置。
一种用于公共区域消毒的智能机器人控制方法,所述机器视觉模块对环境图像进行采集、处理与分析,而激光雷达采集周围环境信息数据,配合采集模块采集的机器人运行数据,并通过主控机分析,将分析结果导入导航模块中,导航模块中根据现有结果生成环境地图,并根据地图规划消毒路径,之后主控机根据路径控制驱动模块使机器人移动,并控制消毒设备对环境进行消毒。
与现有技术对比,本发明具备以下有益效果:
(1)为机器人移动提供路径,并对路径中的障碍物进行规避,使得机器人沿着规定的路径行驶,并在行驶中对区域进行消毒;
(2)具备导航功能,并对环境进行识别,锁定特定区域,并根据环境信息规划相应的路径,对特定区域进行消毒。
附图说明
图1为本发明结构示意图。
具体实施方式
为了使本公开实施例的目的、技术方案和优点更加清楚,下面将结合本公开实施例的附图,对本公开实施例的技术方案进行清楚、完整地描述,为了保持本公开实施例的以下说明清楚且简明,本公开省略了已知功能和已知部件的详细说明,以避免不必要地混淆本发明的概念。
请参阅图1,本发明提供如下技术方案:一种用于公共区域消毒的智能机器人控制系统,包括主控机、驱动模块、导航模块、激光雷达、机器视觉模块、消毒设备、电源模块、语音模块和采集模块
所述采集模块与主控机通讯连接,完成机器人自身位姿状态测量,采集模块主要包括两个部分,第一部分为加速度计,它主要完成对机器人在参考坐标系下的自身坐标系的X轴、Y轴和Z轴的加速度信号;第二部分为陀螺仪,它主要测量机器人在自身坐标系下的自身坐标系的X轴、Y轴和Z轴的角速度信号。
所述导航模块和激光雷达均与主控机通讯连接,主要用于环境地图构建和导航控制,并根据激光雷达传感器采集周围环境信息数据,以及采集模块采集的机器人运行数据完成环境地图构建;
导航模块根据区域并生成环境地图,为机器人提供路径规划,并利用激光雷达对周围环境持续感知,当感知到未知的动态障碍物时,局部路径规划根据感知的障碍物信息,对短期内的运动轨迹进行调整;
激光雷达激光雷达采集的环境信息与已有的环境信息进行匹配关联,实现机器人精确定位,在坐标系统中,激光雷达数据选用极坐标形式进行表达,其返回的观测数据以测量点的形式表达,以获得准确的位置信息。
所述驱动模块与主控机通讯连接,主要负责机器人驱动控制;
所述机器视觉模块与主控机通讯连接,且消毒设备与主控机通讯连接,主要用于对消毒区域的图像采集、处理与分析,并将分析的结果传送给主控机,主控机根据结果控制消毒设备对该区域进行消毒;
所述机器视觉模块包括图像采集子单元、图像预处理子单元、图像分析子单元三个子单元组成;
相机标定单元主要完成对工业相机的标定,目的是为了确定相机的内外参数及以及相机相对世界坐标系的位置;
图像采集单元主要完成对相机的调用和相机是否正常工作的判断;
图像分析单元主要完成对图像的预处理,以及对图像进行分析获取目标的位置。
所述电源模块与主控机通讯连接,电源模块作为机器人的动力来源,主要将24V电压的转换成不同的电压,为主控机及各个模块供电,电源模块通过高速采样电流积分来计算真实电量,相对于电压估算电量更为精确,可实时对电池电量进行监测。
所述语音模块与主控机通讯连接,用于语音提醒,告知消毒区域人员该区域需要进行消毒。
一种用于公共区域消毒的智能机器人控制方法,所述机器视觉模块对环境图像进行采集、处理与分析,而激光雷达采集周围环境信息数据,配合采集模块采集的机器人运行数据,并通过主控机分析,将分析结果导入导航模块中,导航模块中根据现有结果生成环境地图,并根据地图规划消毒路径,之后主控机根据路径控制驱动模块使机器人移动,并控制消毒设备对环境进行消毒。
以上实施例仅为本发明的示例性实施例,不用于限制本发明,本发明的保护范围由权利要求书限定。本领域技术人员可以在本发明的实质和保护范围内,对本发明做出各种修改或等同替换,这种修改或等同替换也应视为落在本发明的保护范围内。