具有控制单元的液压机和用于控制液压机的方法
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及一种根据权利要求1的具有控制单元的液压机,以及根据权利要求9的用于控制液压机的方法。
背景技术
这种类型的液压机设置用于在开环的、液压的回路中的液压-机械能量变换。所述液压机能够构造用于泵运行或者马达运行。为了对例如压力介质体积流量、工作压力、扭矩或者类似参数进行有效率地、符合需求地设置,构造具有可调节的挤压容积的液压机。为了进行调节,所述液压机具有电液调节单元,所述电液调节单元具有可电操控的先导阀和能够被它用压力介质供应的调节缸。
为了扭矩反转/负载反转,尤其为了从泵运行变换到马达运行(或者相反),能够构造具有可调节到零并且由此向两侧调节的挤压容积的液压机。
对于在开环的回路中的这种液压机的流体连接而言,一个能够与驱动机、例如内燃机或者电机联接;并且另一个能够与从动装置、例如传动机构、轮或轴耦接。这样的驱动装置能够例如是移动的作功机械的行驶驱动装置。
开环的液压回路优选地通过下述方式实现:将所述液压机在一侧通过工作管路进行流体连接;并且在另一侧与压力介质槽、尤其与罐进行流体连接。两个液压机能够优选地根据要求在泵运行中和在马达运行中工作。
所述液压机连接到低压和连接到工作管路的压力介质接头分别是持久的。因此,不设置像在闭合回路中为负载反转所必要的那样的压力侧交换装置。
这种驱动装置在开环的回路中能够以简单的方式添加液压工作负载,例如以差动形式构造的液压缸,其方式为,这些液压工作负载能够通过阀门装置与液压回路的压力侧和低压侧连接。
电子控制单元配属于所述液压机或者驱动装置,通过所述电子控制单元能够遵循要求和电子的反馈的运行参数来调节所述液压机或者驱动装置的运行参数。
在基于扭矩的行驶驱动的情况下,能够例如通过控制单元来调节工作管路的工作压力和调节能够与从动装置耦接的液压机的挤压容积。前者通过操控可与驱动机耦接的初级单元的调节单元来实现;后者通过操控可与从动装置耦接的次级单元的调节单元来实现。工作压力和提及的挤压容积的相应的实际值被检测并且电子地反馈到所述控制单元处。
液压机的调节参数的电子反馈的方案(替代了液压机械式反馈)由申请人的商品类型作为“电气化开环回路”液压机或者“EOC”液压机被公开,并且在文献EP 377 04 28 A1中说明。
液压机具有使用限制,为了可靠的运行而必须遵守该使用限制,以便防止短期的和长期的损伤。在此,需要阻止不同损伤机制。因此,例如依据开环回路的低压和抽吸的液压机的实际挤压容积,既不允许超过临界转速,也不允许超过调节动态,因为否则就能够例如在抽吸接头处出现气穴现象或者在驱动机构处出现过高的机械负载。另一方面必须限制例如调节单元的调节速度,以便将在末端位置中撞击时的机械负载保持在范围中并且因此确保疲劳强度。
提及的调节速度和调节动态在液压机的传统的构造中通过在液压机械式调节器或者在调节单元的调节活塞中的节流调节来实现,从而使到所述调节单元的调节室中的调节压力介质体积流量(该调节压力介质体积流量很大程度上决定了液压调节压力,并且因此对调节速度和调节动态产生影响)在所述使用限制的附近范围中节流/减小。
这样的液压机械式解决方案的缺点在于,它们在装置技术方面简单的构造时是固定的,即它们不能够调整并且因此是持久的。它的有效性虽然能够针对有问题的运行状态进行限制,但是这与在装置技术方面的较高的额外耗费相关。此外,因此也在非关键的运行范围中产生额外的液压节流损失,这对所述单元的效率产生负面的作用。
发明内容
与此相对地,本发明以下述任务为基础:获得一种液压机,所述液压机具有针对超出它的运行限制的选择性保护,同时降低在装置技术方面的耗费。进一步的任务在于,获得一种用于控制这样的液压机的方法,通过该方法能够选择性地针对超出它的运行限制对这种液压机进行保护。
第一任务通过具有权利要求1的特征的液压机来解决,第二任务通过具有权利要求9的特征的方法来解决。
所述液压机的有利的改型方案在权利要求2至8中说明,所述方法的有利的改型方案在权利要求10至13中说明。
一种液压机设置用于在开环液压回路中运行。特别地,所述液压机的压力侧或压力接头设置用于与压力管路或工作管路持久地连接;低压侧或低压接头设置用于与低压容器(例如罐)持久地连接。所述液压机能够设置用于优选地作为可与驱动机耦接的液压泵使用,或者设置用于优选地作为可与从动装置耦接的液压马达使用。所述驱动机例如能够是可转速变化地或转速恒定地运行的电机、内燃机或者其他的机械的轴功率的初级来源。所述从动装置例如能够是车辆的、尤其是移动的作功机械的轴或轮或传动机构。为了调节所述液压机的挤压容积,尤其为了有效率地满足涉及该液压机的要求,所述液压机具有调节缸,所述调节缸具有被调节活塞限定的控制腔。为了与要求相关地进行调节,所述控制腔通过液压机的阀、尤其通过先导阀,一方面能够被调节压力介质供应;并且另一方面通过所述阀能够将调节压力介质从所述控制腔中排出。所述阀的操控以电的形式通过所述液压机的电子控制单元来实现,更确切地说与所述液压机的运行参数的要求和反馈的实际值相关。在开环回路中的液压机的调节参数的这种电子反馈在申请人方作为“电气化开环回路”液压机或者“EOC”液压机被熟知。根据本发明设置,电子控制单元具有液压机的至少一个运行限制,该运行限制与所述液压机的至少一个运行参数相关。在电子设置的运行限制的基础上,所述控制单元能够影响所述阀的操控,使得所述运行限制被考虑,即所述运行限制不被超出或违背。
利用根据本发明的控制单元能够在所述液压机处省去机械式液压装置,以便能够遵守运行限制。电子设置的运行限制能够实现所述控制单元的介入到操控中的选择性的干预,而这不同于在持久有效的、在装置技术方面的措施中的情况。这扩宽了所述液压机的使用范围,并且一方面节省了在装置技术和维护技术方面的成本;并且另一方面能够降低运行成本,因为在远离运行限制的地方的节流损失被消除并且更有效率地利用了压力介质能量和调节压力介质能量。当然,能够补充地设置事先提及的、用于限制所述液压机的机械式液压器件,例如用于冗余目的。
在使用至少两个这样的液压机时,这些液压机能够构造开环的回路。为此,所述液压机的压力侧通过工作管路进行流体连接。相反地,它们的低压侧与低压、低压容器或者罐进行流体连接。不设置压力侧交换装置。两个液压机分别具有能够调节到零并且由此向两侧调节的挤压容积,其中,为了相应的调节而分别地设置事先提及的、具有配属的调节缸的阀。所述调节压力介质优选地来源于所述工作管路,并且在相应的阀的压力接头处供使用。所述调节单元的压力介质槽优选地是低压、低压容器或者罐。为了保护所述驱动装置和它的组件、尤其为了保护液压回路和液压机,在所述控制单元中设置两个液压机的运行限制。不必要的是:为两个液压机分配各自的控制单元。申请人保留的是,独立权利要求针对这种的驱动装置。
所述要求例如能够包括所述液压机的额定工作压力、额定挤压容积或者基于或配属于这个额定挤压容积的运动学的额定参数,例如额定摆动角、额定转速、额定扭矩、额定压力介质体积流量、额定功率和/或这些额定参数的额定的时间梯度。
至少一个运行限制例如能够是所述液压机的允许工作压力、允许挤压容积、允许转速、允许扭矩、允许压力介质体积流量、允许功率或者这些参数的允许的时间梯度。
至少一个运行参数(根据该运行参数设置至少一个运行限制)例如能够是所述液压机的当前工作压力、当前吸入压力、当前温度、当前挤压容积、当前转速、当前扭矩、当前压力介质体积流量、当前功率或者提及的运行参数的时间梯度。
所述要求例如能够依照操作者的期望被上一级控制装置传输到所述控制单元处。
在一种改型方案中,所述运行限制以自适应的方式,尤其以参数化的方式设置。因此,所述运行限制例如能够与所述液压机或者驱动装置(例如在不同的作功机械中)的应用相关地、或者与所述液压机或者驱动装置的偏离期望的特性相关地以较少耗费来匹配需求。如果采用传统的、在装置技术方面的措施,在这种情况下需要等待麻烦的改装,例如通过更换喷嘴或者调节活塞。
在一种优选的改型方案中,所述运行限制是允许挤压容积,并且与所述液压机的可检测的转速相关地设置。所述允许挤压容积能够补充地根据所述液压机的可检测的温度、可检测的工作压力和/或可检测的吸入压力进行设置。
根据液压机的使用或者构造(Verbau),液压机针对预确定或者优选的运行方式优化地构造。这种运行方式为了可与驱动机耦接的液压机而设置,例如泵运行。对于设置用于与从动装置耦接的液压机,这种运行方式例如是马达运行。
在相应的运行方式中,优化尤其涉及液压静力的工作腔的从低压到工作压力(反之亦然)的转换以及传动机构卸载。
因此,在一种改型方案中,在控制单元中分别单独地为液压机的可能的运行方式设置至少一个运行限制。
对于非优选的运行方式(即对于下述运行方式:液压机未针对该运行方式进行优化),在控制单元中优选地更严格或者更限制性地设置所述运行限制。
对于液压机的泵运行存在以下重要的运行限制:
抽吸能力限制。这种抽吸能力限制设置为允许挤压容积的与转速相关的限制。当构造为具有可摆动的斜盘的轴向活塞机时,这表示允许摆动角的与转速相关的限制。
传动机构负载限制。这种传动机构负载限制能够设置为允许工作压力的与挤压容积相关的限制,或者相反地设置作为允许挤压容积的与工作压力相关的限制。
在具有能够调节到零并且由此向两侧调节的挤压容积,尤其摆动角的改型方案的情况下,并且由于在开环回路中的液压机的不可改变的压力侧,在所述挤压容积的前缀符号和运行方式之间存在固定的相关性。
因此,在一种改型方案中控制单元设置为,根据挤压容积或者摆动角的前缀符号确定运行方式。
在一种改型方案中设置,控制单元从运行方式中选出配属的运行限制作为适用于控制的运行限制。
在一种改型方案中设置,控制单元从所述液压机的检测的摆动角中确定它的运行方式,尤其是泵运行。在驱动层面上,所述泵运行对应滑行运行或者减速运行(Verzögerungsbetrieb)。
在一种改型方案中并且尤其对于驱动的情况,控制单元设置用于对从动侧的液压机的摆动角在确定的滑行运行或者减速运行中根据检测的转速和/或检测的工作压力进行限制。
在一种改型方案中,通过所述控制单元能够将所述挤压容积或者摆动角的调节速度或者调节动态限制到最小挤压容积或者零挤压容积,尤其在一区间内,所述区间被最小挤压容积或者零挤压容积和在所述控制单元中保存的最大挤压容积的百分比值来限定。对于能够调节到零并且由此向两侧调节的挤压容积或者摆动角,所述区间能够从零向两侧地,尤其以不同的百分比值延伸。最大挤压容积沿着调节方向在零的一侧具有正的前缀符号;在零的另一侧具有负的前缀符号。
在一种改型方案中,最小挤压容积、最大挤压容积以及由它们分别限定的区间、尤其是百分比值,可参数化地保存在所述控制单元中。
在一种改型方案中,随着达到所述区间,即在即将达到最小挤压容积或者最大挤压容积时,能够通过控制单元将操控信号传输到所述调节单元处,所述操控信号引起调节速度或者摆动速度的减速。
此外,在一种改型方案中,通过控制单元能够求取摆动角的导数,或者求取基于所述挤压容积的运动学参数的导数,并且该导数能够与在所述控制单元中保存的因数相乘。乘积作为校正摆动角输入到当前要求的摆动角额定值中,并且在减小摆动角变化的意义上、即在减小所述摆动角的时间梯度的意义上起作用。以这种方式能够将在最大挤压容积和/或最小挤压容积的范围中到机械式挡块上的碰撞动态至少进行限制,并且保护所述液压机免受损伤。
在一种改型方案中,所述控制单元如此设置,使得通过它能够实现到最大挤压容积和/或最小挤压容积上的调节,从而不使用机械式挡块。取消这样的机械式挡块与成本节约相关。
运行限制的参数能够在驱动装置的目标机械处例如通过试验台测试、通过模拟或者交付测量(Abnahmemessung)来求取,并且因此能够保存在所述控制单元中。
为了能够使所述液压机的相应的实际挤压容积输入到调节和限制中,在一种改型方案中设置了用于检测确定所述挤压容积的运动学参数的相应的检测单元。这能够是与斜盘处于有效连接的摆动角传感器或者是与所述调节单元、尤其与它的调节活塞处于有效连接的位移传感器。补充地,尤其为了能够实现对压力、扭矩和/或功率的调节和限制,在一种改型方案中设置与压力侧,尤其与工作管路流体连接的压力传感器。当然,所述传感器与所述控制元件信号连接。
在一种改型方案中,所述液压机的挤压容积的运行限制与它的转速、工作压力和/或传动机构或者压力介质的温度相关地保存在所述控制单元中。
在一种改型方案中,设置速度调节器,通过所述速度调节器能够调节相应的液压机的挤压容积的时间梯度的运行限制。
根据本发明的方法用于控制液压机,所述液压机为了在开环的液压回路中运行而构造。为了调节它的挤压容积,所述液压机具有调节缸,所述调节缸具有被调节活塞限定的控制腔。通过阀能够给这个控制腔供应调节压力介质并且能够将调节压力介质从所述控制腔中排出。所述阀的电操控通过电子控制单元根据所述液压机的运行参数的要求和反馈的实际值来实现。为此,所述方法具有步骤“检测所述要求”;“检测反馈的实际值”;“根据二者求取偏差”;“根据所述偏差来求取所述阀的操控信号”以及“以此操控所述阀”。此外,在所述控制单元中根据所述液压机的至少一个运行参数设置所述液压机的至少一个运行限制。根据本发明,所述方法包括步骤“检测这至少一个运行参数”;并且据此“确定,所述运行限制是否被违背,或者会通过上面提及的操控被违背”;如果确定违背,那么进行步骤“如此影响所述操控信号或者作为基础的要求或者所述偏差,使得所述运行限制被遵守”。
在本方法的一种改型方案中,所述运行限制是允许挤压容积或者基于挤压容积的运动学参数,其中,至少一个运行参数是转速。
在一种改型方案中,检测至少一个附加的运行参数,根据所述附加的运行参数设置允许挤压容积的运行限制。这种附加的运行参数优选地是低压或者吸入压力、工作压力或者高压和/或温度。
在一种变型方案中,所述液压机的工作压力或高压、挤压容积、压力介质体积流量和/或扭矩被要求,其中,所述工作压力或高压、所述挤压容积或者基于这个挤压容积的运动学参数,和/或所述挤压容积的梯度或者与至少一个运行参数相关的参数被限制。
在一种变型方案中,至少一个运行限制和它的与至少一个运行参数的相关性在所述液压机处通过试验台测试、模拟或者交付测量来求取。
附图说明
下面根据附图对具有根据本发明的液压机的驱动装置的一种实施例进行详细阐述。其中:
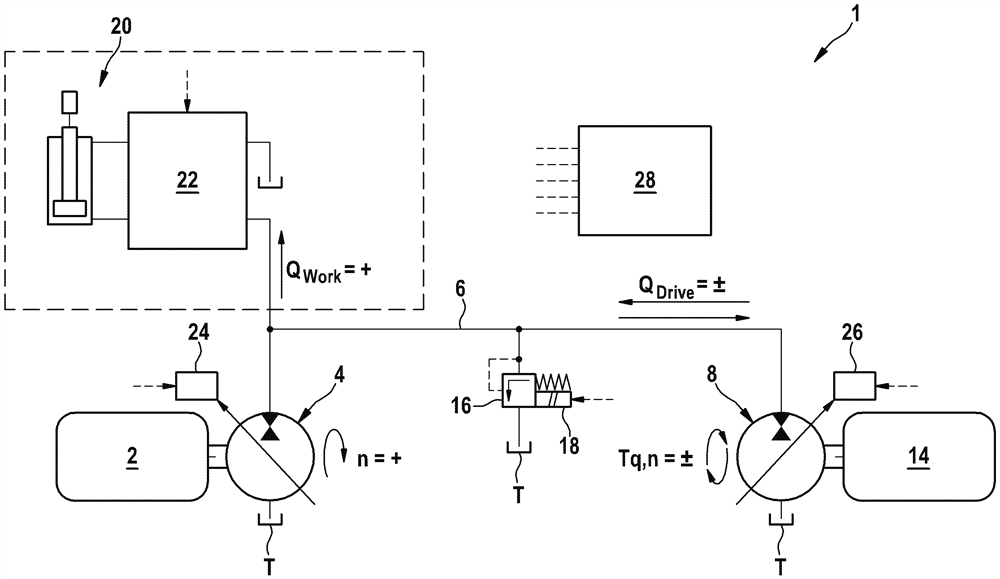
图1示出根据一种实施例的液压静力驱动装置1的示意图;
图2示出在常规的牵引运行中在泵运行中工作的第一液压机4的细节图。
具体实施方式
图1示出根据一种实施例的液压静力驱动装置1的示意图。根据图1,构造成行驶和工作驱动装置的驱动装置1具有第一液压机4和第二液压机8,其中,所述第一液压机与驱动机2连接;所述第二液压机与这个第一液压机通过工作管路6流体连接、与从动侧的传动机构14耦接。所述液压机4、8分别具有电液调节单元24、26,通过所述电液调节单元能够对它们的挤压容积进行调节。相应的液压机4、8基于由申请人的商品类型已知的EOC液压机或者说“电气化开环回路(Electronified Open Circuit)”液压机,并且借助根据本发明设置的控制元件28来保护以防超出它们的相应的运行限制。这种组件保护在下文中进行进一步阐述。
所述驱动装置1通过限压阀16来确保以防过压,它的额定极限压力在示出的实施例中能够通过对电磁铁18的操控来设置。
此外,所述驱动装置1具有液压静力的工作负载20,该工作负载在示出的实施例中构造成液压缸。为了它的压力介质供应,所述工作管路6与液压缸20通过控制阀块22连接。
在常规的运行中,驱动机2以恒定的旋转方向转动,所述旋转方向根据图1以符号n=+来表示。于是第一液压机4是在泵运行中并且第二液压机8是在马达运行中。
所述液压机4、8分别构造有可调节的挤压容积。为此,根据图1,它们分别具有电液调节单元24、26,由所述电液调节单元来使所述液压机4、8的确定了相应的挤压容积的斜盘偏转。在此,挤压容积能够分别调节到零并且由此向两侧调节,即所述液压机4、8分别用所谓的“可完全摆动的”(durchschwenkbaren)挤压容积来构造。因此,即使所述液压机4、8与工作管路6和压力介质槽T的接头连接保持不变,也能够实现在液压回路中的体积流量反转,尤其用于行驶方向的倒转和用于从牵引运行到拖拽运行的转换(并且反之亦然)。
与倒转和转换相关的体积流量方向的变换QDrive=±和在从动装置处的扭矩方向Tq,n=±在图1中示出。
所述控制单元28与电液调节单元24、26、所述限压阀16的电磁铁18和控制阀22以信号发送的方式连接。该控制单元与更多的用于检测运行参数的检测单元以信号接收的方式连接,这在下文中进行阐述。
图2示出在常规的牵引运行中在泵运行中工作的第一液压机4的细节图。下面的考虑同样适用于第二液压机8,区别在于:它的传动轴与传动机构14耦接,而第一液压机4的传动轴与所述驱动机2耦接。
根据图2,电液调节单元24具有可电磁式操纵的、可被控制单元28操控的阀30,该阀具有压力接头,所述压力接头与工作管路6流体连接。阀30的低压接头或者罐接头与压力介质槽T流体连接。此外,阀30具有接头,所述接头与电液调节单元24的调节缸32的调节压力腔或者说控制腔连接。
在未通电的状态中,所述阀30的阀体被弹簧加载到末端位置中,在该末端位置中,工作管路6与调节缸32的控制腔连接。在电磁操纵阀30时,这个控制腔与低压T连接。替代地,所述电液调节单元24的阀30的能够相反地构造,使得在未通电的状态中,压力介质槽T与调节缸32的控制腔连接;并且在通电的状态中,所述控制腔与工作管路6连接。中间位置(在该中间位置中,所述控制腔不仅与工作管路6连接,而且与低压T连接)当然能够在两种变体中实现,例如借助控制边缘的负的重合或者短缺(Unterdeckung)来实现。
所述调节缸32的控制腔由调节活塞限定,第一液压机4的斜盘34在所述阀30的不通电的状态中被所述调节活塞朝向(正的)最大挤压容积+Vgmax的方向加载。值+Vgmax在本实施例中对于在泵运行中工作的第一液压机4来说如此限定,使得对于所述驱动机2的给定的转动方向和转速,由第一液压机4来提供最大的(正的)输送体积流量Q+max。在本实施例中,一种不依赖电的、液压机械式的控制单元36的弹簧加载的反活塞沿着相反的调节方向作用在斜盘34处。此外,所述反活塞与所述工作管路6持续地连接。因此,弹簧力以及工作压力和活塞面积的乘积沿着Vgmax的方向外摆地作用在所述反活塞处。
替代地,所述反活塞的反作用力例如能够通过为使所述工作腔换向而设置的控制盘的扭转来产生,从而能够省去所述调节单元36,或者能够使这个调节单元更小地构造。根据图2,所述调节单元36的控制腔与所述工作管路6永久地压力介质连接。
所述液压机4、8的电液调节单元24、26在不通电的状态中根据在工作管路6中的工作压力如此作用,使得电液调节单元24将挤压容积Vg朝向负的最大值-Vgmax的方向调节到系统特定的工作压力之上;并且朝向正的最大值+Vgmax的方向调节到系统特定的工作压力之下。
为了检测用于控制和/或调节的必要的工作压力的实际值和摆动角,所述驱动装置1具有与工作管路6连接的压力传感器38和各一个与相应的斜盘34耦接的摆动角传感器40,它们与控制单元28信号连接。
正如已经阐述的那样,基于“EOC”单元的液压机4、8在一定条件下由于构造方式所决定能够分别在确定的运行状态中具有相应的斜盘34的较高的摆动角速度和/或较高的摆动角速度梯度。二者能够导致所述液压机4、8的非期望的负载。
这里应当尤其提到在机械式的-Vgmax或+Vgmax挡块处的斜盘34的较高的撞击速度。这个较高的撞击速度尤其导致传动机构、连接和调节系统元件以及摆动角传感器40的发送器与斜盘34的机械式连接的高负载。例如能够涉及摆动摇台的球形销以及调节活塞和/或反活塞的滑靴的以铰接形式构造的连接。
此外,高的摆动角速度和它的动态(即提及的梯度)在离开提及的挡块的地方也能够导致气蚀。这尤其涉及在泵运行中工作的那个液压机4、8的运行状态。这在行驶驱动的牵引运行状态中涉及液压机4,在拖拽运行中涉及液压机8。在此,必须在泵运行中将压力介质从罐T中通过根据图2的抽吸接头S吸入。在吸入时,在抽吸侧S上的(吸入)压力能够降低到压力介质的蒸汽压之下,从而能够出现气穴现象。由此产生了相应的液压机4、8的对应的运行限制,所述运行限制根据运行参数:转速、挤压容积和罐T中的压力(吸入压力)以及根据它们的时间梯度在控制单元28中设置。
根据本发明,所述控制单元28如此构造,使得这样的有问题的运行状态作为运行限制保存在该控制单元中。在此,通过所述控制单元持续地将当前运行状态(所述当前运行状态基于所述摆动角、摆动角速度、摆动角速度梯度和/或工作压力的运行参数的检测或者求取)利用运行限制进行调整。
根据这个调整的结果,尤其如果当前运行状态被确定为接近运行限制或者超过这个运行限制,则通过操控调节单元24和/或26或者补充地操控限压阀16来进行所述控制单元28的校正干预。所述干预能够作为摆动角、摆动角速度、摆动角速度梯度和/或工作压力的额定值的额定值校正来进行。补充地或者替代地能够设置干预驱动机2的转速的额定值。相应的原始的额定值优选地来源于操作界面的操纵(例如行驶踏板或者控制杆的偏移)或者来源于上一级的驱动策略。
通过根据本发明的构造和控制单元28的干预能够将提及的负担降低到不紧要的程度。
此外,正如在开头说明的那样,能够省去相应的挤压容积的液压的和/或机械式的限制装置或者挡块。当然,尤其在电子器件或者传感器件损坏时,为了冗余并且作为后备解决方案能够将这些装置留做备用。
为了限制所述斜盘34在它的末端挡块-Vgmax/+Vgmax处的撞击速度,在所述控制单元28中优选地设置下述装置:一旦所述斜盘34进入到保存在控制单元28中的摆动角区间中,或者一旦摆动角传感器40检测进入到摆动角区间中或者接近所述摆动角区间,则通过所述装置能够使摆动角速度降低。然后,借助提及的检测,通过控制单元28来执行额定值校正。所述装置能够设置为摆动角-速度控制器。
限制能够如此具体地进行:通过控制单元28由反复采样的摆动角来求取摆动角的(时间)梯度,并且因此通过乘法运算与预确定的、尤其参数化地保存的校正因数相乘。然后,产生的乘积是具有与额定值相反的前缀符号的额定值校正值,并且与这个额定值相加。于是,由这个额定值校正值产生摆动速度的期望的减速。
因此,在所述挡块-Vgmax和+Vgmax周围,摆动角-速度的限制通过控制单元28起作用,以限制碰撞动态,由此,能够以较低的装置技术上的耗费保护提及的组件以防损坏。
优选地,将相应的液压机的允许挤压容积或者由构造方式决定的作为基础的几何参数(例如摆动角)作为运行限制与转速相关地保存在所述控制单元28中。
补充地,将允许挤压容积作为运行限制与工作管路6的工作压力、低压和/或压力介质或者传动机构的温度相关地保存在控制单元28中。
根据本发明的限制与其他的要求或者期望无关地以可能的构造方式起作用。
如果系统具有较低的压力介质体积流量或者具有较低的功率要求,那么所述摆动角度例如能够被更强烈地被限制。然而,运行限制的超出被可靠地阻止。
特别地,根据本发明构造的控制单元28对于下述运行状态是有利的:在所述运行状态中,驱动装置1进入到激烈的拖拽运行中。这种运行状态也作为高功率制动被熟知,其中,与从动装置耦接的液压机8在短时间内(即具有高动态)借助它的斜盘34的完全摆动(durchschwenken)从马达运行转换到泵运行中。在这里,在摆动角的过高的动态下(尤其在挤压容积的过零点的区域中)存在较高的气穴现象风险。通过根据本发明进行干预的控制单元28来消除或者至少降低这种风险。
公开的是一种在开环的液压回路中的液压机,它的挤压容积能够以电子的形式检测并且调节,其中所述控制单元设有与至少一个可检测的运行参数相关地限定的至少一个运行限制,使得通过所述控制单元能够将可要求的工作压力、可要求的挤压容积、可要求的转速、可要求的扭矩、可要求的压力介质体积流量、可要求的功率,和/或它们的至少一个时间梯度能够根据至少一个检测的运行参数限制到允许的值上。