基于AR空间标识的到港货物配送系统及其配送方法
文献发布时间:2023-06-19 19:20:08
技术领域
本发明设计一种到港货物配送系统及其方法,采用了AR空间标识技术,具体涉及到基于AR空间标识的到港货物配送系统及其配送方法,属于到港货物集散领域。
背景技术
集装箱海陆联合货物运输,是全世界范围内采用的一种平价和最可行的方案,当集装箱到港之后,开箱整体查验和过关之后,需要将货物分批送往包裹标识的所在地区。其中会产生一个问题,由于货物要求配送的最终陆地目的地各不相同是常态,因此最终在少数始发地进行人工分拣,并且由专门配送车进行集体配送,耗时耗力耗成本。
现有陆地分拣系统,通过人工分拣进入特定传送通道,或者通过机器人集中搬运堆放,解决了物资在批量集中这一环节的问题,但是仍然无法完成具体发往地的分类,仍然需要人工目视而进行分类,从而让专车整体配送,因此仍然未脱离人工目视验视的环节,效率不高,容易出错。
在集装箱到港分货集中中,由于存在混杂的目的地的货物,开箱之后仍然不可能直接进行分拣以实现分类堆放。我们在先期工作中,通过包裹标识物的自然语言算法识别,进行了规定路线的上架机器人搬运,解决了到港集中并且按发往地区(省份)分类的堆放的问题。但是,考虑到大批货物到港集中地尚不可能进行就地发往地(城镇)的分类,存在有些高的货物架上的物品仍然需要使用机械车进行集中搬运下架和出仓,仍然需要人工操纵机械车上不断搜寻目标发往地的包裹逐个进行下架,其间耗时耗能。因此,进一步如何将统一发往地的包裹从堆放地上高效地取出再集中配送是一个亟待解决的问题,这关系到整个海陆物流配送的高效性和准确性。
AR标识技术能够实现远程的画面中物体实体的标识,和现场指导,方便了对于目视画面中目标的位置锁定以及目标信息的可视化识别,现有技术多数将其用于远程维修,以及远程教学。现有技术通过佩戴式的投影技术实现在镜片上的信息投影,然而投影装置安装的位置,投影需要复杂的空间位置算法,才能较为精确地将标识位置标定准确。
发明内容
鉴于上述问题,本发明考虑如下方案,第一,使用AR表示技术,基于先期喷码和分类货物架的摆放位置的记录,考虑如何现实可视化地表示出分类获取加上目标发往地的在货物架上的位置,从而方便地直接按照标识的包裹快速取下,第二如何将高处的包裹在不妨碍可视化前提下取下。例如当驾驶机械搬运车时,驾驶员的目视前方存在机械搬运机构阻挡目视前的画面的情形,这对于AR实体标识的识别产生视野阻挡,因此无法方便使用机械车搬运;存在多个城镇配送的最佳路线问题。
为了解决上述问题,本发明一个方面,提供了一种基于AR空间标识的到港货物配送系统,其特征在于,包括了被记录位置标识的多个分类货物架列,室外卫星,室内卫星信号发射器与发射天线,至少一个搬运机器人,分别与所述室外卫星、所述室内卫星信号发射器与发射天线通讯进行室外、室内定位解算的穿戴式AR装置,以及和所述搬运机器人与AR装置信息通讯的、能够基于发往地经纬度和陆上导航路径解算多发往地最佳路径的用户终端。
其中,每个货物架列由多个分类货物架排列成列组成,所述分类货物架由多层分隔层组成。
所述位置标识的记录方法是,通过所述至少一个搬运机器人将包裹按照规定的次序从分类货物架从下至上依次摆放,每摆放一个包裹即记录一个货物架位置标识号,并将所述标识号与包裹上的喷码关联形成数据包,保存在搬运机器人中设置的存储器中,所述数据包能够根据用户命令被调取发送至用户终端上。其中规定的次序是指从分类货物架从下至上依次摆放或者从分类货物架从下至上且从每一分隔层的一端到另一端依次摆放。
优选地,所述标识号形式为SRLNW,其中S表示地区(如省份),R表示处于所述分类货物架列中所处的分类货物架的顺序编号,L为一个分类货物架上分隔层的顺序编号,N为一个分隔层上包裹的顺序编号,W为附加码,表示一个分类货物架的左侧(以1表示)还是右侧(以0表示),其中S以实物标贴形式表示在分类货物架列末端所在分类货物架上。
优选地,其中所述记录一个货物架位置标识号的方法是,当一个包裹被摆放完毕时,N加1对下一个摆放的包裹进行标识号标识,当一个分隔层包裹被摆满之后,所述搬运机器人抬升躯干,进行第二层分隔层的的包裹摆放,标识号的L加1对下一个分隔层的摆放货物进行标识号标识,当一个分类货物架被摆放满时,R加1对下一个分类货物架的摆放货物进行标识号标识。
优选地,所述搬运机器人接收到用户在用户终端上的发出的命令时,开始根据用户选择的发往地而在记录的数据包中搜索所述喷码对应的用户选择的所述发往地,并将所述发往地关联的所述数据包发送给用户终端。
所述穿戴式AR装置包括穿带支架,透明镜片,与所述透明镜片耦合的透明显示屏幕,设置在所述穿带支架中的可以与卫星信号通讯并进行定位解算的芯片,以及喷码扫描设备,其中,所述透明显示屏幕与芯片电连接,分别实现在室外和室内时货物架位置标识号以及与所述货物架位置标识号对应的数据包数据信息在所述透明镜片上的实时显示,所述芯片与所述用户终端通讯,实现对所述实时显示的用户个性设定,以及屏幕的亮度,显示字体,颜色的调节。
优选地,当穿戴所述所述穿戴式AR装置后,在第一规定范围内的室外,所述芯片根据室外卫星发送的卫星信号进行室外定位解算,并控制所述透明显示屏幕显示所述标识号的S字段,并横向排列在所述透明镜片上,以指示用户当前视野范围内,多个分类货物架列横向排列的地区编号,用户通过所述个性设定使得在所述透明显示屏幕上供S字段显示的位置附近单独或与S字段一起显示出地区名称。
优选地,在进入室内时,用户终端对接收到的所述数据包进行数据整合,形成一个命令按钮,用户在用户终端上点击所述命令按钮后,即可以命令所述芯片控制所述透明屏幕显示所述标识号所关联的喷码标识符以及标识号的RLN字段,并按照分类货物架上包裹的摆放顺序一致的顺序在所述透明镜片上排序显示,以指导用户根据实时的视野来判断所需要的发往地的包裹在分类货物架上的位置,其中所述的喷码标识符是代表喷码的一个几何图形的表示符号,优选为点,三角形,矩形,菱形,圆等。由此可以缩小标识喷码的范围,以提供给用户更加多得实体视野范围。
可以理解的是,如果采用喷码直接显示,则喷码面积可能会很大,从而占据了视野,使得喷码之间可能因为包裹精密排列而在有限的镜片面积上相互重叠,造成视觉上的可视化位置识别障碍。
优选地,在进入室内时,用户在多个第二规定范围内,所述芯片根据室内卫星信号发射器与发射天线的信号进行室内定位解算,能够控制所述透明显示屏幕在所述透明镜片上显示与当前所在的所述第二规定范围对应的喷码标识符以及RLN字段,当用户命令搬运机器人发送所需要的发往地对应的数据包在当前第二规定范围内没有对应的数据包信息可供显示,则在经过当前第二规定范围内时所述透明镜片上不显示任何喷码标识符和标识号的RLN字段,此时用户可以通过用户终端取消命令而恢复当前所在的所述第二规定范围对应的喷码标识符以及RLN字段的显示,其中,
进入其中一个所述第二规定范围的识别方法为,当用户进入室内时,室内室内卫星信号发射器与发射天线会将卫星信号发送给所述芯片,所述芯片根据信号解算出室内实时精确定位,当穿戴AR装置的用户经过其中一个第二规定范围内时,所述芯片根据解算出的定位而控制透明显示屏幕显示相应的喷码标识符和标识号的RLN字段。
优选地,所述第二规定范围为所述分类货物架列中每个货物架两侧的横向长度范围(此处定义长度大于宽度)。
即只要用户所在坐标处于横向宽度范围即开始显示相应范围内的喷码标识符和标识号的RLN字段,只要在该范围内存在有发往地包裹对应的数据包信息即可。
优选地,用户可以通过用户终端选择喷码标识符、标识号的RLN字段和/或发往地信息的部分或完整的进行显示,其中发往地信息通过用户终端对接收到的所述数据包中所述喷码进行喷码扫描识别而获得。
优选地,用户可以利用用户终端发出命令,让至少一个搬运机器人来到摆放了与用户终端接收到的所述数据包中喷码对应的发往地所对应的包裹的分类货物架前进行包裹的下架,并且每搬运一个包裹即通过搬运机器人喷码扫描表示该包裹已经搬运下架,并发送信息给所述用户终端,用户根据个性设定,可以让用户终端命令所述芯片,使得下架的包裹对应的喷码标识符、标识号的RLN字段和/或发往地信息在所述透明镜片上显示消失,而当人工下架时,AR装置上的喷码扫描设备进行喷码扫描,以命令芯片让人工下架的包裹对应的喷码标识符、标识号的RLN字段和/或发往地信息在所述透明镜片上显示消失。
优先地,在当前第二规定范围内,用户可以通过用户终端将下架第一个包裹前的喷码标识符、标识号的RLN字段和/或发往地信息完整显示状态和当前显示的状态进行同时显示,以明确多少包裹已下架,多少包裹尚未下架。
可以理解的是,由于本发明摒弃了传统的精确标识实体具体的位置指示的方案,转而利用货物架上确定的实体的排布次序在可穿戴AR装置的镜片上显示相同排布次序的信息排布,避免了复杂的现实世界空间位置和镜片上视野空间位置之间的投影解算,减轻了芯片计算的负载,并且任然不失高效地指导目标包裹的位置。同时采用镜片+透明显示屏耦合的现实实体标识方案,使得AR装置体积大为减小,不需要额外的投影装置,成本大幅减低。个性化的显示设置,能够根据用户当前经过的任一第二范围而高效、实时,可视化地指示当前包裹下架的状态,避免包裹遗漏。
基于发往地经纬度和陆上导航路径解算多发往地最佳路径的方法如下:
第一步,对所有在配送服务范围内的所有地区的所有城镇距离始发地的直线距离进行升排序;第二歩,对于其中每一个地区,选择含至少一个城镇的第一城镇组,所述第一城镇组中包括距离始发地最近的城镇以及其他所述直线距离递升的城镇;同理继续选择至少一个含第一城镇组以外的其他城镇,形成第二城镇组,所述第二城镇组中包括距离始发地直线距离除第一城镇组中以外的城镇中最短的城镇以及其他除第一城镇组中以外的城镇中所述直线距离递升的城镇,以此类推形成N(N>2)个城镇组;
第三歩,通过室外卫星导航,依次计算从第一城镇组到第N城镇组中,所有城镇与始发地的导航路线L1集合,所有组内城镇任意两个城镇之间的导航路径,即
由于组内的运输距离都不会太远,因此通过直线距离升序排序获得组的划分,分解了地区的运输区域划分,保证尽可能将相对于全国来说范围不太大的同一地区内距离短的城镇归为一类。
本发明另一个目的是提供利用上述基于AR空间标识的到港货物配送系统的到港货物配送方法,包括如下步骤:
s1获取仓库所有喷码对应的城镇,添加入划分好的城镇组中,获得仓库包裹发往的城镇在城镇组中的分布;
s2将城镇组按照次序依次排列,每组内依照直线距离升序次序统计各城镇包裹总数,对于包裹数量按照车辆满载计算,将包裹划分为多个运输组,且每个运输组内包含同一个城镇组内的包裹,如果组内全部同一个城镇组内的包裹添入运输组内后未满载,则向运输组内依次添加下一个序号的城镇组内的按所述直线距离升序排序的其他城镇的包裹;如果满载有剩余,则添加入下一个运输组中,直至完成该组内全部包裹被添加到多个运输组中;
s3分配多部运送车辆,多名驾驶员穿戴AR装置,先后进入第一规定范围和第二规定范围,配合用户终端和搬运机器人确定运输组的所有包裹,并由至少一个搬运机器人和/或人工按照S2的运输组搬运至多部运送车辆附近,由人工装货按照最佳路径送出。
本发明的第三个目的是提供一种计算机可读非暂时性存储介质,其特征在于,其中存储有可由所述基于AR空间标识的到港货物配送系统运行而实现前述到港货物配送方法的计算机可读程序。
有益效果
本发明利用AR特制的透明玻璃和透明显示屏幕耦合的显示部件,使得实体标识技术能够避开复杂的空间定位计算,并且按照实体排序分布显示。室内外卫星的定位,精确地根据用户行走到的区域位置进行针对性的货物架或包裹分布方位的表示。通过用户终端和搬运机器人的通讯,实现包裹的自动下架。利用搬运机器人或AR装置扫码实现AR实体标识的自动显示消失,记录下架的实时状态。基于始发地和各城镇直线距离升序排序形成城镇分组,构建最佳路线集合,从而实现了高效和准确的到港货物配送的系统。
上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
根据下文结合附图对本发明具体实施例的详细描述,本领域技术人员将会更加明了本发明的上述以及其他目的、优点和特征。
附图说明
通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
图1港口货物集中地的一个仓库的顶和墙体的爆炸示意图,其中示意了第一规定范围的区域,分类货物架列,以及基于AR空间标识的到港货物配送系统中的部分组成部分,
图2到港货物配送系统中搬运机器人、智能手机终端、穿戴式AR转置之间数据通信示意图,
图3本发明实施例2中的AR装置后视和穿戴上之后左视示意图,
图4穿戴了AR装置后于图1所示的第一规定范围一地点上的目视视角示意图,
图5穿戴了AR装置后于图6所示的第二规定范围一地点B上的目视视角示意图,
图6本发明实施例1中仓库从顶上俯瞰示意图,其中显示了多个第二规定范围,以及用户经过的B和C点,
图7本发明实施例3中的导航路线L1集合和导航路线L2集合的构造示意图,其中左图显示始发地和多个发往地之间的直线路径,右图显示了多个城镇组及其组合城镇的升序方向排序,
图8本发明实施例3基于AR空间标识的到港货物配送系统的到港货物配送方法中构造运输组方法示意图,
图9本发明实施例3基于AR空间标识的到港货物配送系统的到港货物配送方法流程示意图。
具体实施方式
下面将参照附图更详细地描述本发明的示例性实施例。虽然附图中显示了本发明的示例性实施例,然而应当理解,可以以各种形式实现本发明而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本发明,并且能够将本发明的范围完整的传达给本领域的技术人员。
实施例1
本实施例将说明一种基于AR空间标识的到港货物配送系统,如图1-2所示,其中图1是港口货物集中地的一个仓库的顶和墙体的爆炸示意图,其中描述了到港货物配送系统包括了仓库内设置的被记录位置标识的多个分类货物架列,室外卫星,安装于墙体和屋顶底部的室内卫星信号发射器与发射天线,图2示出的搬运机器人,分别与所述室外卫星、所述室内卫星信号发射器与发射天线通讯进行室外、室内定位解算的穿戴式AR装置,以及和所述搬运机器人与AR装置信息通讯的、能够基于发往地经纬度和陆上导航路径解算多发往地最佳路径的智能手机。其中,每个货物架列由多个分类货物架排列成列组成,所述分类货物架由多层分隔层组成。
所述位置标识的记录方法是,通过所述至少一个搬运机器人将包裹按照规定的次序从分类货物架从下至上依次摆放,每摆放一个包裹即记录一个货物架位置标识号,并将所述标识号与包裹上的喷码关联形成数据包,保存在搬运机器人中设置的存储器中,并能够根据用户命令调取发送至智能手机上(如图2所示)。
具体是,所述搬运机器人接收到用户在智能手机上的发出的命令时,开始根据用户选择的发往地而在记录的数据包中搜索所述喷码对应的用户选择的所述发往地,并将所述发往地关联的所述数据包发送给智能手机。
所述标识号形式为SRLN,其中S表示省份,R表示处于所述分类货物架列中所处的分类货物架的顺序编号,L为一个分类货物架上分隔层的顺序编号,N为一个分隔层上包裹的顺序编号,其中如图1所示,S以实物标贴形式表示在分类货物架列末端所在分类货物架上。
其中所述记录一个货物架位置标识号的方法是,当一个包裹被摆放完毕时,N加1对下一个摆放的包裹进行标识号标识,当一个分隔层包裹被摆满之后,所述搬运机器人抬升躯干,进行第二层分隔层的的包裹摆放,标识号的L加1对下一个分隔层的摆放货物进行标识号标识,当一个分类货物架被摆放满时,R加1对下一个分类货物架的摆放货物进行标识号标识。
实施例2
本实施例将说明AR实时标识的方案。如图3所示,所述穿戴式AR装置包括具有外壳的耳架、设置在耳架上的穿戴伸缩带,以及鼻架组成的穿带支架,连接耳架外壳,且同样被外壳一体封装的透明镜片,与所述透明镜片耦合的透明显示屏幕,以及喷码扫描设备。
其中,所述耳架中封装了可以与卫星信号通讯并进行定位解算的芯片,所述透明显示屏幕与芯片电连接,分别实现在室外和室内时货物架位置标识号以及与所述货物架位置标识号对应的数据包数据信息,在所述透明镜片上的实时显示,所述芯片与所述智能手机通讯,实现对所述实时显示的用户个性设定,以及屏幕的亮度,显示字体,颜色的调节。
图3右侧图显示穿戴之后的AR装置的左视图状态,鼻架架设在人体鼻部,耳架末端架上耳根,而目视前方透明镜片。
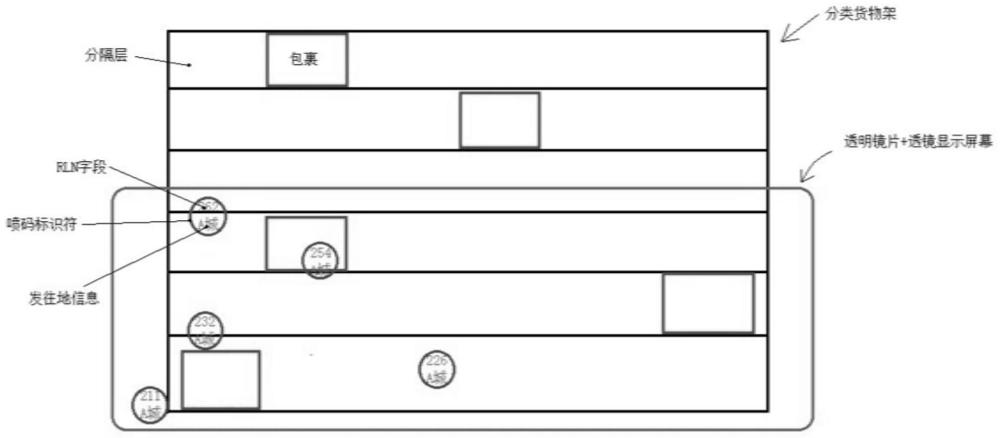
再如图2所示,此时,通过智能手机的个性设置并控制芯片,使得透明显示屏幕在透明镜片上显示如图4和5分别所示的S字段,以及喷码标识符圆和标识号的三位数阿拉伯数字组成的RLN字段和发往地信息A城市。显示地点在分类货物架的左侧,如图6中B点所示,图5中用户设置了忽略W字段的显示。
具体地,当穿戴所述所述穿戴式AR装置后,在进入图1所示的第一规定范围内(横跨仓库的横向入门,以及5-10m的宽的矩形组成)的室外,所述芯片根据室外卫星发送的卫星信号进行室外定位解算,并控制所述透明显示屏幕显示所述标识号的S字段。如图4在一距离进入仓库的大门前的第一距离范围处,在透明镜片上显示出从A1-A9的9列分类货物架的S字段,其中示例性地给出了显示场景中第8列分类货物架列末端所在分类货物架上的实物标贴A8字样(例如A8可以是省份的单个汉字所表示的简称,如京、津、冀等等)。
在进入室内时,智能手机接收到的所述数据包而进行数据整合,形成一个命令按钮,用户在智能手机上点击所述命令按钮后,即可以命令所述芯片控制所述透明屏幕显示所述标识号所关联的喷码标识符、标识号的RLN字段以及发往地信息(图2),并按照分类货物架上包裹的摆放顺序一致的顺序在所述透明镜片上排序显示,以指导用户根据实时的视野来判断所需要的发往地的包裹在分类货物架上的位置。如果此时用户偏转头部离开图4所示意的视野范围,则透明镜片上显示出从A1-A9的S字段依旧部分不变地显示,同样指示着S字段的分布情况。
如图6所示,在进入室内时,用户可以在多个第二规定范围内走动。此时,所述芯片根据如图1所示的室内卫星信号发射器与发射天线的信号进行室内定位解算,能够控制所述透明显示屏幕在所述透明镜片上显示与当前所在的所述第二规定范围对应的喷码标识符、RLN字段以及发往地信息(如图5所示)。其中,每个分类货物架两侧的颜色块区域被黑色线分割为了多个第二规定范围,以黑色线为每一个第二规定范围的边界。
当用户B走到图6中的第二规定范围内时,室内室内卫星信号发射器与发射天线会将卫星信号发送给所述芯片,所述芯片根据信号解算出室内实时精确定位。用户此时若命令搬运机器人发送所需要的发往地对应的数据包在当前图6中所示的B点所在的第二范围内有对应的数据包信息可供显示,则在用户经过当前第二规定范围内的B点时,所述芯片控制透明显示屏幕在所述透明镜片上显示喷码标识符、标识号的RLN字段以及发往地信息。
如图5所示,给出了在透明镜片上透过透明显示屏幕显示的五处城市A的包裹的空间分布方式。用户可以根据所建的标识号,命令搬运机器人升高躯干(图2)去下架够不着的货物架高出的包裹,例如图5中以文字“包裹”所示的顶层分隔层的一个发往城市A的包裹。当用户走到下一个点C时,如果对应的第二规定范围不存在相应的城市A的数据包信息,也即该第二规定范围对应的分类货物架上没有发往城市A的包裹,也就不会在如图5的透明镜片上显示任何喷码标识符、RLN字段以及发往地信息。此时,用户可以通过用户终端取消命令而恢复C点所在的所述第二规定范围对应的喷码标识符以及RLN字段的显示。如果某一分类货物架上城市A的所有包裹已经下架完毕,则用户终端的命令调取数据包后同样不会在透明镜片上显示相应的任何喷码标识符、RLN字段以及发往地信息。
或者当图6中B点或者C所在第二规定范围的分类货物架上下架的包裹,用户可以在智能手机上发出命令,让搬运机器人进行包裹下架,如图2中所示意的在下架后喷码扫描表示该包裹已经搬运下架,并发送信息给所述智能手机,用户根据个性设定,可以让智能手机命令所述芯片,使得下架的包裹对应的喷码标识符、标识号的RLN字段和发往地信息在所述透明镜片上显示消失。而当人工下架时,如图3所示的AR装置上的喷码扫描设备进行喷码扫描,以命令芯片让人工下架的包裹对应的喷码标识符、标识号的RLN字段和城市A字样在所述透明镜片上全部显示消失。
同理,如果此时用户偏转头部离开图5所示意的视野范围,则透明镜片上显示出五处城市A的包裹的空间分布方式依旧不变,同样指示着RLN字段的分布情况。因此只要用户达到第一规定区域和任一个第二规定区域中,一但透明镜片显示出了内容。则无论用户在第一规定区域和任一个第二规定区域中如何走动。透明镜片上显示的内容不会改变分布。如果用户不熟悉分类货物架的摆放位置分布,则可以走到货物架的对称中心,以更好地识别出显示出的包裹的位置分布方式。
实施例3
本实施例将说明实施例1中的基于发往地经纬度和陆上导航路径解算多发往地最佳路径的方法,以及实施例2中的基于AR空间标识的到港货物配送系统的到港货物配送方法。如图7所示,基于发往地经纬度和陆上导航路径解算多发往地最佳路径的方法如下:
第一步,对所有在配送服务范围内的所有地区的所有城镇距离始发地的直线距离进行升排序;第二歩,对于其中每一个地区,选择含3个城镇的第一城镇组,所述第一城镇组中包括距离始发地最近的城镇以及其他所述直线距离递升的城镇;同理继续选择3个含第一城镇组以外的其他城镇,形成第二城镇组,所述第二城镇组中包括距离始发地直线距离除第一城镇组中以外的城镇中最短的城镇以及其他除第一城镇组中以外的城镇中所述直线距离递升的城镇,以此类推形成N(N>2)个城镇组;
图7左图显示始发地I与多个圆圈代表的发往地之间的直线连接描述,并在右图显示序号C1-C3组成的第一城镇组,序号C4-C6组成的第二城镇组,以至于其他城镇组,每组三个城镇的排序形式,且按照箭头从上至下依次直线距离递增,即升序方向。
第三歩,通过室外卫星导航,依次计算从第一城镇组到第N城镇组中,所有城镇与始发地的导航路线L1集合(图7左图),所有组内城镇任意两个城镇之间的导航路径,即每组3条路径(图7右图),一共3N条路径的集合L2。
如图8所示,实施例2中的基于AR空间标识的到港货物配送系统的到港货物配送方法包括如下步骤:
s1获取仓库所有喷码对应的城镇,添加入划分好的城镇组中,获得仓库包裹发往的城镇在城镇组中的分布;
s2将城镇组按照次序(即第一、第二等等次序)依次排列,每组内依照直线距离升序次序统计各城镇包裹总数,对于包裹数量按照车辆满载计算,将包裹划分为多个运输组,且每个运输组内包含同一个城镇组内的包裹,如果组内全部同一个城镇组内的包裹添入运输组内后未满载,则向运输组内依次添加下一个序号的城镇组内的按所述直线距离升序排序的其他城镇的包裹;如果满载有剩余,则添加入下一个运输组中,直至完成该组内全部包裹被添加到多个运输组中;如图9,第一城镇组C1-C3完成运输组满载状态。而对于未满载1和未满载2两个状态,前者则是C3包裹数量不足以引起满载,而使得至少部分的C4包裹才能填满;后者则是C4全部包裹填满后,仍需要第二城镇组中直线距离第二长的C5的至少部分包裹才能填满。对于满载有剩余的情况,则例如C3有看色块部分显示的重叠多余的部分,需要填入其他运输组。
s3分配多部运送车辆,多名驾驶员穿戴AR装置,先后进入第一规定范围和第二规定范围,配合用户终端和搬运机器人确定运输组的所有包裹,并由搬运机器人按照S2的运输组搬运至多部运送车辆附近,由人工装货按照最佳路径送出。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:在本发明的精神和原则之内,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案脱离本发明的保护范围。