一种全自动的机轴上料研磨一体机
文献发布时间:2023-06-29 06:30:04
技术领域
本发明涉及机械加工技术领域,具体为一种全自动的机轴上料研磨一体机。
背景技术
自动生产线中机轴的上料研磨工序,需在传输机械臂等传动设备上安装夹持动力装置如夹持气缸,在夹持动力装置上安装用于直接夹持机轴工件的夹爪,夹爪利用气缸开合夹持工件,传输机械臂等传动设备将机轴类工件从待料区和加工区直接搬运传输,以实现自动化作业。
现有技术中,为保证夹持稳定,在夹持搬运过程中不发生工件脱落和夹伤工件表面等现象,夹持面积小夹爪容易损伤工件表面,夹持面积大容易形成空隙导致夹持不稳或者增加加工成本,夹爪尺寸需和工件相匹配,因此一般一种轴类工件需定制一套匹配的夹爪。
因此当一条生产线用于生产多种不同尺寸或者不同形状零件时,例如夹爪的夹持面圆弧直径需和工件的直径匹配,例如夹持位置为阶梯轴过渡位置时夹爪需要,夹持位置为异形轴如六角形或方形等,均需更换不同夹爪,准备多种配件备品,尤其是生产要求高且生产批量不多的高精度产品时,单独定制一整套夹爪和附属配件时,会增加生产成本和设备零件的管理成本。
为此,提出一种全自动的机轴上料研磨一体机。
发明内容
本发明的目的在于提供一种全自动的机轴上料研磨一体机,通过夹爪上安装多层夹爪式的自适应夹持装置,多层夹爪在应对阶梯轴等直径有变化的轴类时,多层夹爪可以分别夹持阶梯轴相邻两段直径不同位置,增加夹持面积,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种全自动的机轴上料研磨一体机,包括:
传输机械臂,所述传输机械臂上安装有夹持工件用的气缸,所述气缸设有两个气动手指;
夹爪,所述气缸的两个气动手指上均安装有用于抓取轴类工件的夹爪;
还包括:
自适应夹持装置,所述夹爪设有用于应对不同形状的工件的自适应夹持装置。
自适应夹持装置在夹持直径有变化的轴类工件如阶梯轴,锥形轴时,能提高夹爪和被夹持工件的接触面积,提高夹持稳定性。
优选的,所述自适应夹持装置包括多层夹爪,所述夹爪分为内层和外层,所述外层夹爪直接和气缸的气动手指固定,所述外层夹爪为L形,所述内层夹爪为长条形,所述外层夹爪长边的厚度为短边厚度的一半,所述内层夹爪的厚度与外层夹爪的厚度一致,所述内层夹爪和外层夹爪的L形内侧壁通过水平滑槽滑动连接,所述内层夹爪面向外层夹爪短边的一面设有盲孔一,所述盲孔一内设有弹簧一,所述弹簧一一端与盲孔一连接,所述弹簧一另一端弹簧一与外层夹爪的L形内侧壁连接,所述夹爪未夹持工件时,所述内层夹爪末端相对工件方向突出外层夹爪。
夹持阶梯轴等直径有变化的轴类,尤其是当轴类直径较大的轴段长度较小即圆饼形,且适合夹持的位置仅位于直径较大的轴段附近时,现有技术一体式夹爪的夹持容错率降低可调整度降低,一体式夹爪夹持到直径较大的轴段长度较小的位置时,夹爪有很大一部分夹持面积处于悬空状态,容易发生夹持不稳或者夹持压强过大损伤轴表面,自适应夹持装置可弹性活动调整,多层夹爪可以分别夹持阶梯轴相邻两段直径不同位置,由凸出外层夹爪的弹性内层夹爪夹持直径较小一端,由外层夹爪夹持直径较大一端,由于内层夹爪的厚度与外层夹爪的厚度一致,至少有一半夹爪的厚度能稳定夹持工件。
即使夹持位置是直径没有变化的轴类,在夹持轴类工件时,相比于现有技术一体式夹爪,凸出外层夹爪的弹性内层夹爪会优先接触被夹持工件,在气缸的两个气动手指收缩夹持过程中,如此时工件轴方向与夹爪不垂直,此时先接触工件的内层夹爪会在相同大小的弹力作用下将工件轴方向自动修正调整至与夹爪垂直,避免夹爪与被夹工件的夹持角度不等、左右受力面积不均导致夹伤工件。
优选的,所述内层夹爪面向外层夹爪短边的一面设有盲孔一为螺纹孔,所述螺纹孔外层夹爪面向的一面设有盲孔二,所述盲孔二为螺纹孔,所述盲孔一和盲孔二通过双头螺柱连接。
工件自重较轻,适合夹持的位置较短时,可通过双头螺柱分别固定内层夹爪和外层夹爪,使内层夹爪和外层夹爪形成固定的阶梯式夹爪,只使用凸出端的内层夹爪夹持较轻的工件。
优选的,每个所述夹爪面对工件的方向上设置有两个圆弧形缺口一,所述缺口一弧形内壁设有与缺口一圆弧长度等长的燕尾槽一,所述燕尾槽一内设有弧形槽一,所述弧形槽一的长度为燕尾槽一的五分之四,每个所述夹爪的圆弧形缺口一均安装有滑块一,所述滑块一为扇形块,所述滑块一的圆弧面与夹爪圆弧形缺口一的直径相等,且滑块一的圆弧面设有和燕尾槽一适配的圆弧形燕尾卡块一,所述滑块一的圆弧形燕尾卡块一和燕尾槽一能以滑块一圆弧的圆心进行同心滑动配合,滑块一圆弧面的圆弧中心沿着直径方向设有穿透滑块一的螺孔一,螺孔一内装有沉头螺钉,每个所述滑块一的直边一侧开设有两个圆弧形缺口二;每个所述滑块一的圆弧形缺口二均安装有滑块二,每个所述圆弧形缺口二设有与缺口二圆弧长度等长的燕尾槽二,所述燕尾槽二内设有弧形槽二,所述弧形槽二的长度为燕尾槽二的五分之四,所述滑块二为扇形块,所述滑块二的圆弧面与圆弧形缺口二的直径相等,且滑块二的圆弧面设有和燕尾槽二适配的圆弧形燕尾卡块二,所述滑块二的圆弧形燕尾卡块二和燕尾槽二能以滑块二圆弧圆心进行同心滑动配合,滑块二圆弧面的圆弧中心沿着直径方向设有穿透滑块二的螺孔二,螺孔二内装有沉头螺钉,每个所述滑块二的直边一侧开设有两个圆弧形缺口三;每个所述滑块二的圆弧形缺口三均安装有滑块三,每个所述圆弧形缺口三设有与缺口三圆弧长度等长的燕尾槽三,所述燕尾槽三内设有弧形槽三,所述弧形槽三的长度为燕尾槽三的五分之四,所述滑块三为扇形块,所述滑块三的圆弧面与圆弧形缺口三的直径相等,且滑块三的圆弧面设有和燕尾槽三适配的圆弧形燕尾卡块三,所述滑块三的圆弧形燕尾卡块三和燕尾槽三能以滑块三圆弧圆心进行同心滑动配合,所述滑块三圆弧面的圆弧中心沿着直径方向设有穿透滑块三的螺孔三,螺孔三内装有沉头螺钉。
滑块一、滑块二、滑块三均是能转动144度的扇形滑块,当夹爪在气动手指的带动夹持工件时,滑块三最先接触到工件的扇形一端最先受力,滑块三会像跷跷板一样转动直到滑块三受力平衡,由于滑块三安装在滑块二上,滑块三收到的力会传递到滑块二上,滑块二同样收到相同的力再传递给滑块一,随着气动手指的持续夹持,所有的滑块一、滑块二和滑块三会像跷跷板一样转动直到受力平衡即夹爪和被夹持工件接触面积最大,由于滑块一、滑块二、滑块三均是能沿着遇到的刚性障碍点转动,即使是被夹持轴类工件的截面形状是方形或六角形,滑块一、滑块二、滑块三均会转动到贴合工件表面的角度,以此对工件形成最大的夹持接触面积。
有利的,沉头螺钉最好选用内六角止动型,有利于节约内部空间,沉头螺钉从螺孔一旋入直到穿过滑块一,沉头螺钉前进部进入弧形槽一,在滑块一沿着缺口一的轴心转动过程中,沉头螺钉都只在弧形槽一内转动,由于弧形槽一的长度为燕尾槽一的五分之四,滑块一转动角度达到最大时,沉头螺钉伸入弧形槽一的一端会卡在弧形槽一内,因此沉头螺钉能限制滑块一脱离夹爪。
滑块二和滑块一,以及滑块三和滑块二,均通过沉头螺钉和低于燕尾槽的弧形槽限位配合,与夹爪和滑块一的配合相同,不再赘述。
优选的,所述夹爪内设有用于减小滑块一、滑块二和滑块三之间相互摩擦的润滑系统。
润滑系统用于对滑块一、滑块二和滑块三的转动结构提供润滑,由于整个转动系统都是滑轨式转动,摩擦系数较大,当滑块一、滑块二和滑块三因摩擦过大无法转动时,夹爪无法对被夹持工件提供最大的接触面积,可靠性降低,需要在转动结构中使用润滑脂或者润滑油等润滑材料降低摩擦,以此增加接触面以提高夹持稳定性和可靠性,当夹持力较大,即转动结构的载荷较大时,亦可使用石墨粉进行润滑。
优选的,所述润滑系统包括开设在夹爪垂直方向上的油槽,所述圆弧形缺口一上开设有水平方向的油孔一,所述油孔一和油槽连通,所述滑块一上开设有和螺孔一同面平行且贯穿滑块一的油孔二,所述滑块二上开设有和螺孔二同面平行且贯穿滑块二的油孔三。
通过向油槽内注射润滑脂或者石墨润滑粉,油孔一和油槽连通,油孔二和油孔一连通,油孔三和油孔二连通,且弧形槽一、弧形槽二和弧形槽三可形成存储容纳润滑材料的相对密闭空腔,能长时间维持润滑效果,同时存储在弧形槽一、弧形槽二和弧形槽三内的润滑材料还能用于防止沉头螺钉与滑块一、滑块二、滑块三发生金属氧化。
优选的,所述夹爪和气动手指之间安装有撞击保险柱,所述撞击保险柱用于减少意外冲击导致的损失。
由于夹爪上安装有较多的零件,当夹爪受到较大的意外冲击时,如果整个夹爪变形损坏,维修更换的成本较高,因此在夹爪和气动手指之间设置撞击保险柱,撞击保险柱是整个夹爪装置破坏强度最低的零件,发生意外撞击时,在其他零件的破坏强度未达到时,撞击保险柱最先损坏断裂,以此来保护其他成本更高的零件。
优选的,所述撞击保险柱为六棱柱形,且六棱柱中部开设有多个贯穿撞击保险柱的安全通孔,所述撞击保险器的两端设有用于安装气动手指和夹爪的螺牙。
六棱柱形方便直接安装,使用普通开口扳手即可完成安装和拆卸,六棱柱中部开设有多个贯穿撞击保险柱的安全通孔是为了提高撞击保险柱的应力集中,降低六棱柱形的破坏强度,撞击保险器与气动手指和夹爪之间连接形式亦可根据生产实际选择安装楔形卡块或者铆钉等其他紧固形式,能保证撞击保险器作为整个夹爪装置破坏强度最低的零件即可。
优选的,所述气缸上安装有撞击开关,所述撞击开关的导线两端分别撞击保险柱的两端连接,多个撞击保险柱的电路连接形式为串联,所述撞击开关和传输机械臂电性连接。
由于夹持的工件是轴类零件,发生意外撞击时会产生回转扭矩,受力较大一边的撞击保险柱最先损坏断裂,任意一个撞击保险柱断裂撞击开关都会形成开路,撞击开关控制传输机械臂急停,避免持续撞击造成更大的损失。
优选的,所述夹爪为软磁性硅钢材料,每个所述夹爪远离工件的一侧面均安装有电磁铁,所述电磁铁和撞击开关电性连接。
发生意外撞击时,撞击开关形成开路,撞击开关控制电磁铁启动,电磁铁产生磁性将工件和断裂的零件固定住防止掉落损坏,防止掉落的工件零件对附近的人员造成机械伤害。
与现有技术相比,本发明的有益效果为:
1、所述夹爪上安装有多层夹爪式的自适应夹持装置,多层夹爪在应对阶梯轴等直径有变化的轴类时,多层夹爪可以分别夹持阶梯轴相邻两段直径不同位置,由于内层夹爪的厚度与外层夹爪的厚度一致,至少有一半夹爪的厚度能稳定夹持工件,同时外层夹爪与内层夹爪通过弹性连接,内层夹爪相对外层夹爪先接触工件,能利用弹力预先对工件进行位置校正提高夹持效果。
2、在夹爪上设置多层可转动滑块,利用转动滑块受力时能沿着遇到的刚性障碍点转动的运动特性,使多层滑块自适应转动到与接触面积最大、受力最稳的位置,在应对不同直径或者不同截面形状的轴时,夹爪总能自动转动最贴合轴类工件的位置,以此形成为最为稳定的夹持结构。
3、在夹爪上设置有成本低廉的撞击保险柱,撞击保险柱为薄弱环节型安全装置,在夹爪受到较大的意外冲击时,单边撞击保险柱优先损坏以确保其他零件不再受到进一步损坏,撞击保险柱损坏时,成本较高的电气化安全装置启动,确保夹爪上的其他零件和工件被固定在夹爪上不发生掉落,减少由此进一步引发机械安全事故的概率。
附图说明
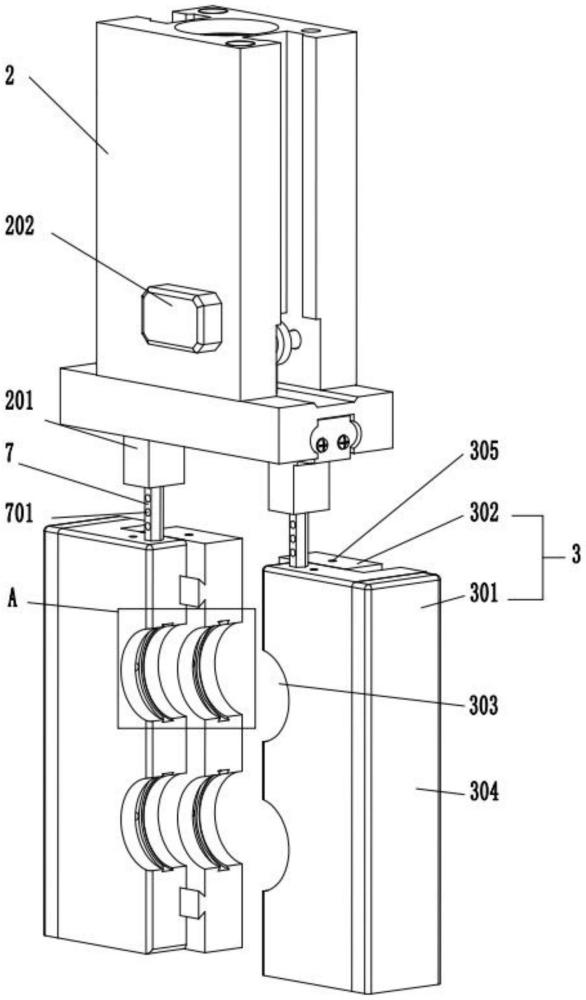
图1为本发明的外观立体图;
图2为图1的A部放大图;
图3为滑块一和滑块二的外观示意图;
图4为滑块三的外观示意图;
图5为整体安装示意图;
图6为夹爪剖面图;
图7为图6的B部放大图;
图8为一体式夹爪截面夹持图;
图9为一体式夹爪俯视夹持图;
图10为层夹爪和内外层夹爪弹簧连接俯视剖面图;
图11为内层夹爪和外层夹爪双头螺柱连接俯视剖面图;
图12为本发明夹持六边形轴类工件的示意图。
图中:1、传输机械臂;2、气缸;201、气动手指;202、撞击开关;3、夹爪;301、外层夹爪;3011、盲孔二;302、内层夹爪;3021、盲孔一;3022、弹簧一;3023、双头螺柱;303、缺口一;3031、燕尾槽一;3032、弧形槽一;304、电磁铁;305、油槽;306、油孔一;4、滑块一;401、燕尾卡块一;402、缺口二;403、燕尾槽二;404、弧形槽二;405、螺孔一;406、油孔二;5、滑块二;501、燕尾卡块二;502、缺口三;503、燕尾槽三;504、弧形槽三;505、螺孔二;506、油孔三;6、滑块三;601、燕尾卡块三;605、螺孔三;7、撞击保险柱;701、安全通孔;8、工件;9、沉头螺钉。
具体实施方式
请参阅图1至图12,本发明提供一种全自动的机轴上料研磨一体机,技术方案如下:
本发明主要工作原理:在上料夹爪3上设置自适应夹持装置,自适应夹持装置为柔性分体式结构,自适应夹持装置的柔性部件在气动手指201的夹持方向上可以实现一个自由度的水平运动,自适应夹持装置在夹持阶梯轴时能确保夹爪3至少有一半的宽度能直接夹持到工件8,夹爪3与工件8接触的部件还可以在夹持平面内实现144度的转动,在夹持截面为非圆形轴类工件8时,夹爪3的柔性转动部件自动转动到贴合工件8的位置,自动增加夹爪3与工件8的接触面积。
组装和夹爪3各个可动零部件的加工方法:
参照图1至图4,气缸2以及气缸2自带的气动手指201为工业标准件,采购选择适配的即可,六棱柱形一端连接气动手指201另一端连接夹爪3中的外层夹爪301,外层夹爪301和内层夹爪302通过滑槽连接,此处滑槽需为限位槽,使用双头螺柱3023或者带有两端带螺纹连接块的弹簧一3022对外层夹爪301和内层夹爪302进行连接限位,依次将每个滑块一4的燕尾卡块一401对准夹爪3缺口一303的燕尾槽一3031,通过燕尾滑槽配合,将滑块一4滑入缺口一303中,随后将沉头螺钉9依次拧入螺孔一405内,沉头螺钉9与弧形槽距离调整至一毫米到两毫米之间,同样的方法依次安装所有滑块一4和滑块二5,则完成整个夹爪3的可动部分安装。
本发明涉及到内凹盲槽类如弧形槽一3032、弧形槽二404和弧形槽三504的生产,可以采用分体式生产,将内凹盲槽所在零件以盲槽宽度的一半作为分割线,分割成两个开放式明槽,用铣削的方法分别加工盲槽两边的零件,加工完成后再以螺纹等连接方法拼装连接即可,值得说明的,涉及到内凹盲槽类的零部件亦可使用消失模等铸造方法进行制造,只需夹爪3材质为软磁性材质,夹爪3能响应电磁铁304的磁化吸附工件8即可。
具体实施例一:
添加润滑脂及润滑脂在夹爪3内的流动情况:
参照图6和图7,向夹爪3上的油槽305注射润滑脂,润滑脂受重力和注射压力作用,润滑脂垂直向下流动,随后润滑脂经夹爪3上水平开设的油孔一306流入弧形槽一3032内,弧形槽一3032和燕尾槽一3031连通,则润滑脂填入燕尾槽一3031和燕尾卡块一401之间,润滑脂填充完弧形槽一3032后,润滑脂通过与弧形槽一3032连通的油孔二406进入弧形槽二404,弧形槽二404和燕尾槽二403连通,则润滑脂填入燕尾槽二403和燕尾卡块二501之间,润滑脂填充完弧形槽二404后,润滑脂通过与弧形槽二404连通的油孔三506进入弧形槽三504,弧形槽三504和燕尾槽三503连通,则润滑脂填入燕尾槽三503和燕尾卡块三601之间,至此,润滑脂完成了对夹爪3上内连接的各个活动部件的润滑。
具体实施例二:
运行工况:轴类工件8的夹持位置为圆形截面时;
具体参照图5,滑块一4、滑块二5、滑块三6均会转动到贴合工件表面的角度,以此对圆形截面工件8形成最大的夹持接触面积,作为对比,参照图8,夹爪3为一体式,工件8的夹持位置为圆形截面时的夹持状态,可以明显看出本发明的夹爪3的自适应夹持装置,能对圆形截面工件8提供更多的夹持面积。
具体实施例三:
运行工况:轴类工件8的夹持位置为六角形截面时;
具体参照图12,滑块一4、滑块二5、滑块三6均会转动到贴合工件表面的角度,以此对工件8形成最大的夹持接触面积。
具体实施例四:
运行工况:工件8夹持过程发生意外撞击;
参照图1和图5,夹持工件8的过程中,如遇到外力或者传输机械臂1设定错误等意外时,夹爪3会受到较大的载荷,载荷甚至超出夹爪3的破坏强度,当夹爪3受力时,由于夹持工件8为轴类,杠杆原理可知,夹爪3承受的扭矩大于正面撞击载荷,往往是单边夹爪3先被破坏断裂,此时没有了夹持的约束,另一边夹爪3受力较小不会再被破坏,由于夹爪3和气缸2的气动手指201之间的连接件为整个夹爪3装置破坏强度最低的零件,发生意外撞击时,在其他零件的破坏强度未达到时,撞击保险柱7最先损坏断裂,以此来保护其他成本更高的零件如滑块一4和滑块二5等,在撞击保险柱7断裂的瞬间,撞击开关202响应,控制电磁铁304启动,由于夹爪3为软磁性硅钢材料容易被磁化,也能在外部磁性消失后快速失去磁力避免吸附铁粉铁屑等杂质,电磁铁304产生磁性将工件8和断裂的零件固定住防止掉落损坏,防止掉落的工件8零件对附近的人员造成机械伤害。