一种蓝宝石晶圆自动铲片装置及方法
文献发布时间:2023-06-29 06:30:04
技术领域
本发明涉及晶圆自动化处理技术领域,具体涉及一种蓝宝石晶圆自动铲片装置及方法。
背景技术
在LED芯片制备过程中,器件外延层主要在蓝宝石衬底上进行生长,由于蓝宝石衬底具有机械强度高、稳定性好、始于高温生长等优良特性,因此被大多数生长工艺选作衬底材料。
目前蓝宝石衬底生产抛光工序,分为粗抛和精抛工序,两道工序后均需测量陶瓷盘上晶圆厚度,而后,晶圆需要人工手动从载具进行手动分离,并将晶圆收集到晶圆专用卡塞内。在此过程中,陶瓷盘搬运、剥离、转运及收集操作都是由人工完成,由于承载晶圆的陶瓷盘质量较大,人工作业费时费力、效率低并且劳动强度大,并且,还会因人为因素的操作造成生产物料损坏情况;此外,人手接近转运设备存在安全隐患,人工将晶圆收集到专用卡塞内的操作同样存在工作强度大、效率低的缺陷,且容易因人为手法因素而造成收集晶圆的片序混乱、品质异常;同时,由于晶圆质地较脆,其在载盘上呈现多圈排列并与载盘之间存在一定粘附力,常规自动化设备的剥离、转运操作同样会对晶圆造成物理冲击而使其损坏,因此,需要一种新的技术方案加以改善。
发明内容
针对上述现有技术中的问题,本发明提供了一种蓝宝石晶圆自动铲片装置及方法,用以实现蓝宝石晶圆与载具分离的全自动化操作,降低劳动强度并提高生产效率,同时确保晶圆品质完好及收集片序的一致性,增益晶圆制造行业的生产效益。
本发明通过以下技术方案实施:一种蓝宝石晶圆自动铲片装置,包括安装架,其中,所述安装架上设有铰座、调距执行件,并间隔设有工作台,所述工作台一端与所述铰座铰接安装,另一端与所述调距执行件输出轴连接;所述工作台上设有旋转执行件连接带动的旋转台,所述旋转台上方放置设有承载盘,所述承载盘一侧依次设有气浮导轨、收集卡塞;所述气浮导轨固定于所述工作台上,所述气浮导轨入口对准所述承载盘,所述气浮导轨的导轨面贯穿设有多个微孔等距排列形成的微孔阵列,所述气浮导轨底部设有导流腔;所述收集卡塞为一侧设有多层U形槽口的开口容器,并以其所述U形槽口对准所述气浮导轨出口,所述收集卡塞与竖移模组连接,所述竖移模组具有竖向驱动功能,并设于所述工作台上;所述承载盘上方间隔设有铲刀、风刀、旋转架,所述铲刀、所述风刀通过铰接机构安装于所述工作架上,所述旋转架通过旋转机构安装于工作架上,所述旋转架的一端或两端设有朝向下方的真空吸盘,所述铲刀、所述风刀刀身及所述旋转架架身皆与所述承载盘形成锐角夹角,所述风刀设有至少两个,并以所述承载盘轴截面进行对称分布。
进一步的,所述导流腔的腔体延伸路径呈封闭框形结构,其框形结构上开口的长宽尺寸大于下开口的对应尺寸,所述上开口与所述气浮导轨进行无缝对接,所述下开口下端置空,所述下开口内部设有导流框,所述导流框外壁轮廓与所述下开口内壁轮廓形成等距阵列,所述导流框外壁与所述下开口内壁夹持形成出气缝,所述出气缝与所述导流腔内腔贯穿连通;所述导流腔一旁设有正压设备,所述正压设备正压端通过管路贯穿所述导流腔腔壁并连通于其内腔;所述导流腔内壁设有斜向布置的斜壁,所述斜壁内侧面呈现向内凸起的弧面,所述斜壁内侧面与所述下开口内侧面的衔接部位形成外圆角,所述斜壁内侧面与所述上开口内侧面的衔接部位形成内圆角。
进一步的,所述承载盘上方贴附设有多个晶圆片,多个所述晶圆片分别组成外圈中心阵列、内圈中心阵列,设所述外圈中心阵列内切圆直径为a,所述内圈中心阵列外切圆直径为b,所述内圈中心阵列内切圆直径为c,所述晶圆片直径为r,所述风刀刀口与所述铲刀刀口间距为x,则有:(a-b)/2+r+c>x>r。
进一步的,所述微孔阵列的微孔孔径为0.08mm~0.12mm。
进一步的,所述铲刀所处的所述铰接机构设有执行电机、执行气缸,所述风刀所处的所述铰接机构设有调整电机,所述铲刀、所述风刀的倾斜角度分别由所述执行电机、所述调整电机控制,所述铲刀的直线行程由所述执行气缸控制,所述执行气缸类型为多位气缸;所述旋转架上方设有旋转气缸、双轴气缸,所述旋转架与所述旋转气缸输出轴相连,所述旋转气缸缸身与所述双轴气缸输出轴相连。
进一步的,所述承载盘一侧设有两个对称布置的滑动台,所述承载盘另一侧设有两个对称布置的固定台,每个所述滑动台、每个所述固定台上皆设有一个定位座,每个定位座上皆通过轴孔配合设有横向布置的定位轮,所述滑动台是设于滑轨上的滑动机构,所述滑动台一侧设有定位气缸,所述定位气缸输出轴与所述滑动台上的所述定位座形成传动连接。
进一步的,所述旋转执行件为伺服电机或步进电机中的一种,所述旋转执行件件身固定于升降台上,所述旋转执行件输出轴连接于所述旋转台,所述旋转台与所述升降台之间嵌入设有推力轴承,所述工作台上设有多个升降气缸,多个所述升降气缸输出轴共同连接支撑所述升降台。
进一步的,所述调距执行件为多级气缸、多级电缸或多级油缸中的一种,其输出轴与所述工作台形成铰接连接,所述承载盘盘面、所述气浮导轨轨道面及所述收集卡塞的U形槽口槽底面平行。
本发明还提供了一种蓝宝石晶圆自动铲片方法,包括以下步骤:
S1定位:通过自动载具将承载盘及其上方生产的晶圆片阵列送入工作台上方工位,令承载盘置放于旋转台上,启动定位气缸令其输出轴带动滑动台滑动,使承载台一侧的两个定位轮贴附于承载盘侧壁,以此推移承载盘直至承载盘另一侧侧壁贴附于两个固定台上的定位轮,令承载盘横移至预设工位完成定位工作;
S2倾角调整:启动调距执行件输出轴将工作台一端抬起,使工作台及其上方的在另一端铰座导引下进入倾斜状态,利用限位件或精度功能件停止调距执行件,使工作台保持标准倾斜角度,启动执行电机与调整电机分别调整铲刀、风刀的倾斜角度,令铲刀刀口进入晶圆片的内圈中心阵列内,令风刀刀口进入晶圆片的内圈中心阵列与外圈中心阵列之间区域;
S3内圈剥离:启动执行气缸令其输出轴带动铲刀伸出,同步启动执行电机调整铲刀倾角,直至铲刀接触内圈阵列的晶圆片,确保铲刀刀口抵住内圈晶圆片侧壁与承载盘表面所形成的的角落,继续启动执行气缸令铲刀铲入内圈晶圆片与承载盘之间的缝隙内,使内圈晶圆片一端被铲刀翘起;启动双轴气缸令旋转架下移,使旋转架一端的真空吸盘贴附并吸住被翘起的内圈晶圆片,再次启动双轴气缸令旋转架带动真空吸盘及晶圆片上移,完成内圈剥离工作;
S4内圈转运:启动旋转气缸使旋转架旋转,真空吸盘及晶圆片被旋转架带动至气浮导轨上方,启动正压设备使正压气流经导流腔释放至气浮导轨,通过气浮导轨的微孔阵列将正压气流均匀分散并在导轨面上形成一层正压气膜,断开真空吸盘的真空源以释放晶圆片,使晶圆片下落至气浮导轨上并由正压气膜托浮,在重力作用下,由倾斜状态的气浮导轨及正压气膜将漂移状态的晶圆片导引至斜下方的收集卡槽内;
S5内圈收集:启动旋转执行件带动旋转盘、承载盘旋转,使内圈阵列的任一剩余晶圆片对准气浮导轨入口,重复S3、S4操作,将内圈阵列的剩余晶圆片逐个剥离、转运至收集卡槽内,同步控制竖移模组以调整收集卡槽的竖向位置,以此提供更多收纳空间并对内圈阵列的全部晶圆片完成收集作业;
S6外圈剥离:启动执行气缸令其输出轴带动铲刀伸出,同步启动会执行电机调整铲刀倾角,直至铲刀接触外圈阵列的晶圆片,确保铲刀刀口抵住外圈晶圆片侧壁与承载盘表面所形成的的角落,继续启动执行气缸令铲刀铲入外圈晶圆片与承载盘之间的缝隙内,使外圈晶圆片一端被铲刀翘起;同步开启两侧风刀输出喷射气流,令一端被翘起的外圈晶圆片被两侧喷射气流吹拂滑落至临近的气浮导轨入口,完成外圈剥离作业;
S7外圈转运:由两侧风刀吹拂令剥离的外圈晶圆片滑落至气浮导轨上,由气浮导轨表面正压气膜托浮晶圆片,在重力作用下将晶圆片导引至收集卡槽内;
S8外圈收集:启动旋转执行件带动旋转盘、承载盘旋转,使外圈阵列的任一剩余晶圆片对准气浮导轨入口,重复S6、S7操作,将外圈阵列的剩余晶圆片逐个剥离、转运至收集卡槽内,同步控制竖移模组以调整收集卡槽的竖向位置,以此提供更多收纳空间并对外圈阵列的全部晶圆片完成收集作业。
本发明的有益效果是:本装置利用旋转台、调距执行件分别对承载盘及晶圆形成旋转驱动及倾角控制,令晶圆随承载盘置入后由工作台倾斜而送入铲片工位,由风刀、铲刀及真空吸盘组件对晶圆阵列的内圈、外圈进行分布式自动铲取、转移作业,在送入气浮导轨后,由于气流喷射微孔阵列可在气浮导轨表面形成一层正压气膜,令送入的晶圆被正压气膜托浮至漂移状态以保障片体不受物理冲击,而后随工作台的倾斜角度滑落至收集卡塞内进行收集,由于气浮导轨的正压气膜及倾斜结构所提供的柔性输送轨道可有效确保晶圆形态尺寸的完整性,风刀、铲刀及真空吸盘组件对晶圆阵列内、外圈的分布处理可安全解除晶圆与承载盘的粘附,并确保晶圆与载具分离、转移操作的高度自动化,有效降低劳动强度并提高生产效率,同时保障晶圆品质完好及收集片序的一致性,增益晶圆制造行业的生产效益。
附图说明
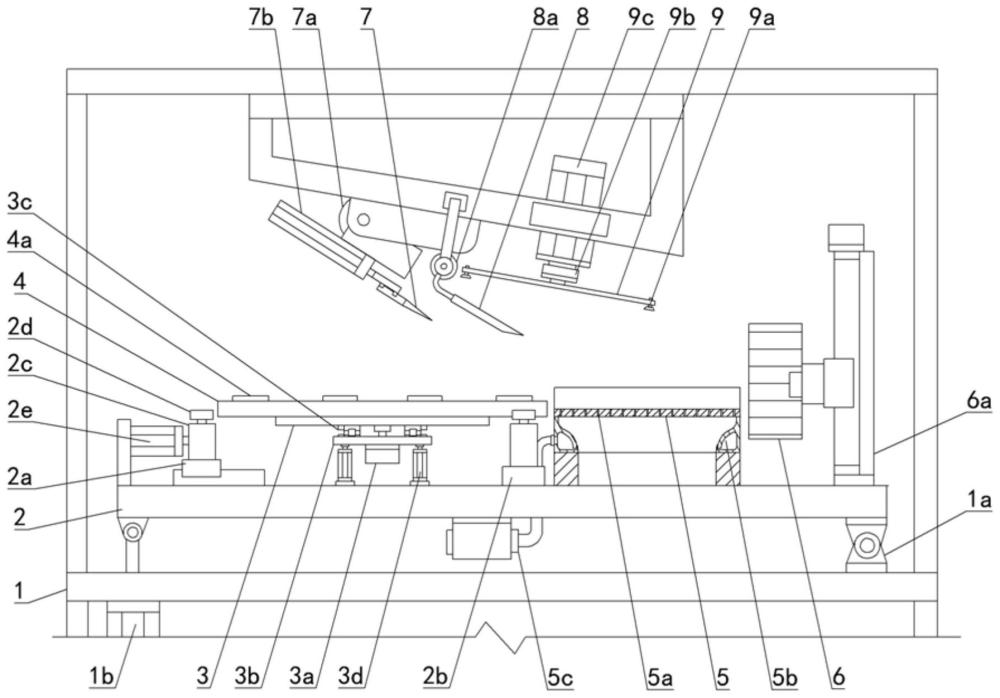
图1是本发明一实施例的结构侧视图;
图2是本发明一实施例的局部结构俯视图;
图3是本发明一实施例中气浮导轨及导流腔的结构示意图;
图4是本发明一实施例的定位作业示意图;
图5是本发明一实施例的倾角调整作业示意图;
图6是本发明一实施例的内圈剥离作业1示意图;
图7是本发明一实施例的内圈剥离作业2示意图;
图8是本发明一实施例的内圈转运作业示意图;
图9是本发明一实施例的外圈剥离作业示意图;
图10是本发明一实施例的外圈转运作业示意图;
图11是本发明一实施例中气浮导轨及导流腔的托浮作业示意图;
图12是本发明一实施例中铲刀及风刀的剥离作业示意图。
图中:1-安装架、1a-铰座、1b-调距执行件、2-工作台、2a-滑动台、2b-固定台、2c-定位座、2d-定位轮、2e-定位气缸、3-旋转台、3a-旋转执行件、3b-升降台、3c-推力轴承、3d-升降气缸、4-承载盘、4a-晶圆片、5-气浮导轨、5a-微孔阵列、5b-导流腔、5c-正压设备、5d-上开口、5e-下开口、5f-斜壁、5g-导流框、6-收集卡塞、6a-竖移模组、7-铲刀、7a-执行电机、7b-执行气缸、7x-铲刀刀口、8-风刀、8a-调整电机、8x-风刀刀口、9-旋转架、9a-真空吸盘、9b-旋转气缸、9c-双轴气缸、9x-吸盘端部。
具体实施方式
下面结合说明书附图及实施例对本发明作进一步的详细描述。
如图1-3所示,一种蓝宝石晶圆自动铲片装置,包括安装架1,其中,安装架1上设有铰座1a、调距执行件1b,并间隔设有工作台2,工作台2一端与铰座1a铰接安装,另一端与调距执行件1b输出轴连接;工作台2上设有旋转执行件3a连接带动的旋转台3,旋转台3上方放置设有承载盘4,承载盘4一侧依次设有气浮导轨5、收集卡塞6;气浮导轨5固定于工作台2上,气浮导轨5入口对准承载盘4,气浮导轨5的导轨面贯穿设有多个微孔等距排列形成的微孔阵列5a,气浮导轨5底部设有导流腔5b;收集卡塞6为一侧设有多层U形槽口的开口容器,并以其U形槽口对准气浮导轨5出口,收集卡塞6与竖移模组6a连接,竖移模组6a具有竖向驱动功能,并设于工作台2上;承载盘4上方间隔设有铲刀7、风刀8、旋转架9,铲刀7、风刀8通过铰接机构安装于工作架上,旋转架9通过旋转机构安装于工作架上,旋转架9两端设有朝向下方的真空吸盘9a,铲刀7、风刀8刀身及旋转架9架身皆与承载盘4形成锐角夹角,风刀8设有至少两个,并以承载盘4轴截面进行对称分布。
利用旋转台3、调距执行件1b分别对承载盘4及晶圆形成旋转驱动及倾角控制,令晶圆随承载盘4置入后由工作台2倾斜而送入铲片工位,由风刀8、铲刀7及真空吸盘9a组件对晶圆阵列的内圈、外圈进行分布式自动铲取、转移作业,在送入气浮导轨5后,由于气流喷射微孔阵列5a可在气浮导轨5表面形成一层正压气膜,令送入的晶圆被正压气膜托浮至漂移状态以保障片体不受物理冲击,而后随工作台2的倾斜角度滑落至收集卡塞6内进行收集,由于气浮导轨5的正压气膜及倾斜结构所提供的柔性输送轨道可有效确保晶圆形态尺寸的完整性,风刀8、铲刀7及真空吸盘9a组件对晶圆阵列内、外圈的分布处理可安全解除晶圆与承载盘4的粘附,并确保晶圆与载具分离、转移操作的高度自动化。
在本实施例中,导流腔5b的腔体延伸路径呈封闭框形结构,其框形结构上开口5d的长宽尺寸大于下开口5e的对应尺寸,上开口5d与气浮导轨5进行无缝对接,下开口5e下端置空,下开口5e内部设有导流框5g,导流框5g外壁轮廓与下开口5e内壁轮廓形成等距阵列,导流框5g外壁与下开口5e内壁夹持形成出气缝,出气缝与导流腔5b内腔贯穿连通;导流腔5b一旁设有正压设备5c,正压设备5c正压端通过管路贯穿导流腔5b腔壁并连通于其内腔;导流腔5b内壁设有斜向布置的斜壁5f,斜壁5f内侧面呈现向内凸起的弧面,斜壁5f内侧面与下开口5e内侧面的衔接部位形成外圆角,斜壁5f内侧面与上开口5d内侧面的衔接部位形成内圆角。
利用导流腔5b的框形路径结构及其斜壁5f、下开口5e、上开口5d衔接形成渐开式管路,当气流由导流框5g处的出气缝喷出时,在流体的附壁效应作用下,部分气流被弧面体导向贴附至斜壁5f附近(圆角面可进一步确保附壁效应的顺利生成),由于部分气体贴附于渐开式管路的周边斜壁5f,使导流腔5b中部出现负压区域而吸纳外界气流进入下开口5e,并随斜壁5f处的贴附气流一齐向上输送至气浮导轨5,该方式能获得流体介质连续、均匀的面状喷射气流,面状气流随气浮导轨5的微孔阵列5a透出后形成状态稳定的正压气膜,进一步确保正压气膜托浮晶圆片4a的稳定性。
在本实施例中,承载盘4上方贴附设有多个晶圆片4a,多个晶圆片4a分别组成外圈中心阵列、内圈中心阵列,设外圈中心阵列内切圆直径为a,内圈中心阵列外切圆直径为b,内圈中心阵列内切圆直径为c,晶圆片4a直径为r,风刀刀口与铲刀刀口间距为x,则有:(a-b)/2+r+c>x>r。
通过上述位置布置使两刀口最大间距不超过(a-b)/2+r+c,最小间距不超过x,可确保工作台2倾斜并带动承载盘4接近风刀8、铲刀7后,铲刀刀口正好位于内圈中心阵列内部,风刀刀口正好位于内圈中心阵列与外圈中心阵列之间,以此保障风刀8、铲刀7进行晶圆剥离作业的顺利实施。
在本实施例中,微孔阵列5a的微孔孔径为0.08mm~0.12mm,优选为0.1mm,由于0.1mm孔径可制成较为密集、细小的微孔阵列,可确保正压气体透过微孔阵列5a后所形成气流波动不大、气流足够密集、细腻并以此保证正压气膜的均匀性,以此保障气膜托浮晶圆输送的稳定性。
在其它对比例中,微孔阵列5a的微孔孔径为0.5mm,由于0.5mm孔径已可针对正压气体的瞬时变化而透出波动较为剧烈的气流,从而在微孔阵列5a的不同区域或不同作业时间释放出局部差异较大的波动气流,令正压气膜无法稳定托浮晶圆完成输送,使晶圆偏移触碰或漂出气浮导轨5造成损坏。
在本实施例中,铲刀7所处的铰接机构设有执行电机7a、执行气缸7b,风刀8所处的铰接机构设有调整电机8a,铲刀7、风刀8的倾斜角度分别由执行电机7a、调整电机8a控制,铲刀7的直线行程由执行气缸7b控制,执行气缸7b类型为多位气缸;旋转架9上方设有旋转气缸9b、双轴气缸9c,旋转架9与旋转气缸9b输出轴相连,旋转气缸9b缸身与双轴气缸9c输出轴相连。
通过执行气缸7b的气体弹性特点,确保铲刀7铲取晶圆的直线动力具有一定的缓冲性,以此防止铲取动作对晶圆造成冲击破坏的可能,并通过多位气缸的选型设计而令执行气缸7b具有至少两种行程工位,以此对内腔晶圆、外圈晶圆的铲取工位进行适应作业。
在本实施例中,承载盘4一侧设有两个对称布置的滑动台2a,承载盘4另一侧设有两个对称布置的固定台2b,每个滑动台2a、每个固定台2b上皆设有一个定位座2c,每个定位座上皆通过轴孔配合设有横向布置的定位轮,滑动台2a是设于滑轨上的滑动机构,滑动台2a一侧设有定位气缸2e,定位气缸2e输出轴与滑动台2a上的定位座2c形成传动连接。
通过承载盘4两侧对称布置的共计四个定位轮2d,令每次承载盘4移送至旋转台3后,可利用定位轮2d推移调整使承载盘4准确进入设定工位内,通过定位轮2d的贴附旋转使承载盘4自身的正常旋转不受影响,而承载盘4倾斜、横移或脱离的趋势可借助四个定位轮2d进行夹持定位,进一步确保承载盘4的工位精确性及作业稳定性。
在本实施例中,旋转执行件3a为伺服电机,旋转执行件3a件身固定于升降台3b上,旋转执行件3a输出轴连接于旋转台3,旋转台3与升降台3b之间嵌入设有推力轴承3c,工作台2上设有多个升降气缸3d,多个升降气缸3d输出轴共同连接支撑升降台3b。
通过升降台3b、推力轴承3c及旋转盘对承载盘4进行支撑,由升降气缸3d对承载盘4的提供支撑力及竖移动力,确保大质量陶瓷承载盘4的支撑稳定并借助推力轴承3c完成旋转动作,而后通过伺服电机对承载盘4进行高精度转角定位。
在本实施例中,调距执行件1b为多级电缸,其输出轴与工作台2形成铰接连接,借助多级电缸行程长、精度高的特性,对大尺寸工作台2进行倾角调整并使其处于适宜的倾斜位置,确保风刀8、铲刀7准确进入工位;承载盘4盘面、气浮导轨5轨道面及收集卡塞6的U形槽口槽底面平行,以此保障晶圆片4a滑落路径的一致性。
本实施例的工作原理在于本实施例提供的一种蓝宝石晶圆自动铲片方法,包括以下步骤:
S1定位:通过自动载具将承载盘4及其上方生产的晶圆片4a阵列送入工作台2上方工位,令承载盘4置放于旋转台3上,优选的,可通过气动升降气缸3d令升降台3b带动旋转台3上移,使承载盘4较为稳定的置放于旋转台3上,而后收纳升降气缸3d令升降台3b及旋转台3下移归位;如图4所示,启动定位气缸2e令其输出轴带动滑动台2a滑动,使承载台一侧的两个定位轮贴附于承载盘4侧壁,以此推移承载盘4直至承载盘4另一侧侧壁贴附于两个固定台2b上的定位轮,令承载盘4横移至预设工位完成定位工作,以便后序与风刀8、铲刀7位置的精准对接;
S2倾角调整:如图5所示,启动调距执行件1b输出轴将工作台2一端抬起,使工作台2及其上方的在另一端铰座1a导引下进入倾斜状态,利用调距执行件1b的电缸精度功能停止行程,使工作台2保持标准倾斜角度,启动执行电机7a与调整电机8a分别调整铲刀7、风刀8的倾斜角度,令铲刀刀口7x进入晶圆片4a的内圈中心阵列内,令风刀刀口8x进入晶圆片4a的内圈中心阵列与外圈中心阵列之间区域,其中,风刀刀口8x位置与铲刀刀口7x位置如图2所示,同时确保吸盘端部9x位置对准内腔中心阵列的晶圆片4a上;
S3内圈剥离:如图6所示,启动执行气缸7b令其输出轴带动铲刀7伸出,同步启动执行电机7a调整铲刀7倾角,直至铲刀7接触内圈阵列的晶圆片4a,确保铲刀刀口7x抵住内圈晶圆片4a侧壁与承载盘4表面所形成的的角落,继续启动执行气缸7b令铲刀7铲入内圈晶圆片4a与承载盘4之间的缝隙内,使内圈晶圆片4a一端被铲刀7翘起,以此减轻晶圆片4a与承载盘4的粘附力,并通过执行气缸7b的多位输出功能停留在第一行程位,以此防止晶圆片4a受损;启动双轴气缸9c令旋转架9下移,使旋转架9一端的真空吸盘9a贴附并吸住被翘起的内圈晶圆片4a,再次启动双轴气缸9c令旋转架9带动真空吸盘9a及晶圆片4a上移,形成如图7所示状态,完成内圈剥离工作;
在本步骤中,由于铲刀7的翘起作业仅需与晶圆片4a角落形成较小的接触部位,剩余剥离操作均由真空吸盘9a完成,因此,可令质地较脆的晶圆片4a免于受到物理损伤而确保其品质完好;
S4内圈转运:启动旋转气缸9b使旋转架9旋转,左侧(方向依图7)的真空吸盘9a及晶圆片4a被旋转架9带动至右侧气浮导轨5上方,形成如图8所示状态,此时,启动正压设备5c使正压气流经导流腔5b释放至气浮导轨5,通过气浮导轨5的微孔阵列5a将正压气流均匀分散并在导轨面上形成一层正压气膜,断开真空吸盘9a的真空源以释放晶圆片4a,使晶圆片4a下落至气浮导轨5上并由正压气膜托浮,在重力作用下,由倾斜状态的气浮导轨5及正压气膜将漂移状态的晶圆片4a导引至斜下方的收集卡槽内,借助正压气膜的柔性托浮以避免晶圆片4a所受物理冲击,确保晶圆品质完好,同时,收集卡槽内壁可设置柔性材质(如海绵、毛绒),以对晶圆片4a的侧向冲击实施进一步的缓冲保护;
在本步骤中,正压设备5c开启后,正压气流填充于导流腔5b内部并由导流框5g处的出气缝释放,借助斜壁5f的弧面状及其与下开口5e的外圆角过渡结构,在气流附壁效应作用下,部分朝上释放的正压气流贴附于斜壁5f附近,形成如图11所示状态,此时由于部分气体被导引至周边斜壁5f,导流腔5b中部出现负压区而吸纳下开口5e开放区域处的外界空气,使正压气流与外界气流共同形成介质连续、均匀的面状喷射气流,在朝上透过气浮导轨5的微孔阵列5a后形成一层连续稳定的正压气膜,由于借助附壁效应而牵引的面状喷射气流输出强度均匀、状态稳定,且不存在传统风扇切割空气造成流体介质不连续、强度差异大的缺陷,因此可进一步确保正压气膜托浮晶圆片4a的稳定性,保障晶圆转运过程的品质完好;
S5内圈收集:启动旋转执行件3a带动旋转盘、承载盘4旋转,使内圈阵列的剩余晶圆片4a对准气浮导轨5入口,重复S3、S4操作,将内圈阵列的剩余晶圆片4a逐个剥离、转运至收集卡槽内,同步控制竖移模组6a以调整收集卡槽的竖向位置,以此提供更多收纳空间并对内圈阵列的全部晶圆片4a完成收集作业,并通过上述全自动化操作以确保收集片序的一致性;
S6外圈剥离:如图9所示,当内圈晶圆片4a被全部收集后,启动执行气缸7b令其输出轴带动铲刀7伸出,同步启动会执行电机7a调整铲刀7倾角,直至铲刀7接触外圈阵列的晶圆片4a,确保铲刀刀口7x抵住外圈晶圆片4a侧壁与承载盘4表面所形成的的角落,继续启动执行气缸7b令铲刀7铲入外圈晶圆片4a与承载盘4之间的缝隙内,使外圈晶圆片4a一端被铲刀7翘起,以此降低晶圆片4a与承载盘4之间的粘附力;同步开启两侧风刀8输出喷射气流,如图12所示,两侧喷射气流对中部晶圆片4a形成足够的横移合力,被铲刀7翘起的晶圆片4a被两侧喷射气流的合力吹拂滑落至临近的气浮导轨5入口,完成外圈剥离作业;
在本步骤中,由于铲刀7的翘起作业仅需与晶圆片4a角落形成较小的接触部位,剩余剥离操作均由两侧风刀8完成,因此,可令质地较脆的晶圆片4a免于受到物理损伤而确保其品质完好;
S7外圈转运:如图10所示,由两侧风刀8吹拂令剥离的外圈晶圆片4a滑落至气浮导轨5上,由气浮导轨5表面正压气膜托浮晶圆片4a,在重力作用下将晶圆片4a导引至收集卡槽内,正压气膜的托浮过程与步骤S4同理,以此确保晶圆片4a的稳定输送;
S8外圈收集:启动旋转执行件3a带动旋转盘、承载盘4旋转,使外圈阵列的任一剩余晶圆片4a对准气浮导轨5入口,重复S6、S7操作,将外圈阵列的剩余晶圆片4a逐个剥离、转运至收集卡槽内,同步控制竖移模组6a以调整收集卡槽的竖向位置,以此提供更多收纳空间并对外圈阵列的全部晶圆片4a完成收集作业,并通过上述全自动化操作以确保收集片序的一致性。
通过上述作业,令多圈排列、质地较脆且与承载盘4存在粘附力的晶圆片4a阵列得到安全剥离、转运及输送,同时确保晶圆与载具分离、转移操作的高度自动化,有效降低劳动强度并提高生产效率,同时保障晶圆品质完好及收集片序的一致性,增益晶圆制造行业的生产效益。
以上所述,仅为本发明的优选实施例,并非用于针对本发明作出形式上的限制,应当理解,在权利要求书所限定的特征范围下,实施例还可作出其它等同形式的修改、变动,这些都应涵盖于本发明的保护范围之内。