基于矢量数字化的矿山钻孔设备用高度调节修正方法
文献发布时间:2024-01-17 01:13:28
技术领域:
本发明涉及基于矢量数字化的矿山钻孔设备用高度调节修正方法。
背景技术:
矿山机械行业是为固体原料、材料和燃料的开采和加工提供装备的重要基础行业之一,服务于黑色和有色冶金、煤炭、建材、化工、核工业等重要基础工业部门,其产品在交通、铁道、建筑、水利水电等基础部门的基本建设中也有大量应用;矿山机械是直接用于矿物开采和富选等作业的机械,包括采矿机械和探矿机械。
在众多类型的矿山机械中,矿山钻孔设备是应用较为广泛的探矿机械,能够深入到地下的矿区来探测具体的矿产产量和矿产类型;其中,由于在矿区的不同高度,矿产的产量和类型存在较大差异,因此矿山钻孔设备的钻孔高度是矿区探测过程中必要参考数据,根据在不同钻孔高度探测反馈得到的不同数据来得到矿区的具体矿产分布状况。
而现有的矿山钻孔设备在作业过程中大多是由工作人员直接设置动作,缺乏相应的参考数据或参考变量,不能对矿山钻孔设备检测探头所处的矿区高度进行准确识别,在矿产资源的影响下,探测得到的矿区高度和钻孔位置会存在较大的误差,从而不能对矿山钻孔设备的探测高度进行有效调节修正;同时,由工作人员进行实际操作,自动化程度较低,不能形成完整的闭环控制模式和进行实时控制,工作效率低下。
发明内容:
本发明实施例提供了基于矢量数字化的矿山钻孔设备用高度调节修正方法,方法设计合理,基于地质剖面图矢量数字化的处理算法和多个功能组件的相互配合作用,设置对应的参考数据,对矿山钻孔设备检测探头所处的矿区高度和钻孔位置进行准确识别,避免周围外界环境对矿产资源探测带来的影响,减少操作误差,保证探测结果精准可靠;同时形成闭环自动循环控制,可进行实时调节控制,提升整体自动化进程和矿产探测效率,解决了现有技术中存在的问题。
本发明为解决上述技术问题所采用的技术方案是:
基于矢量数字化的矿山钻孔设备用高度调节修正方法,所述调节修正方法包括以下步骤:
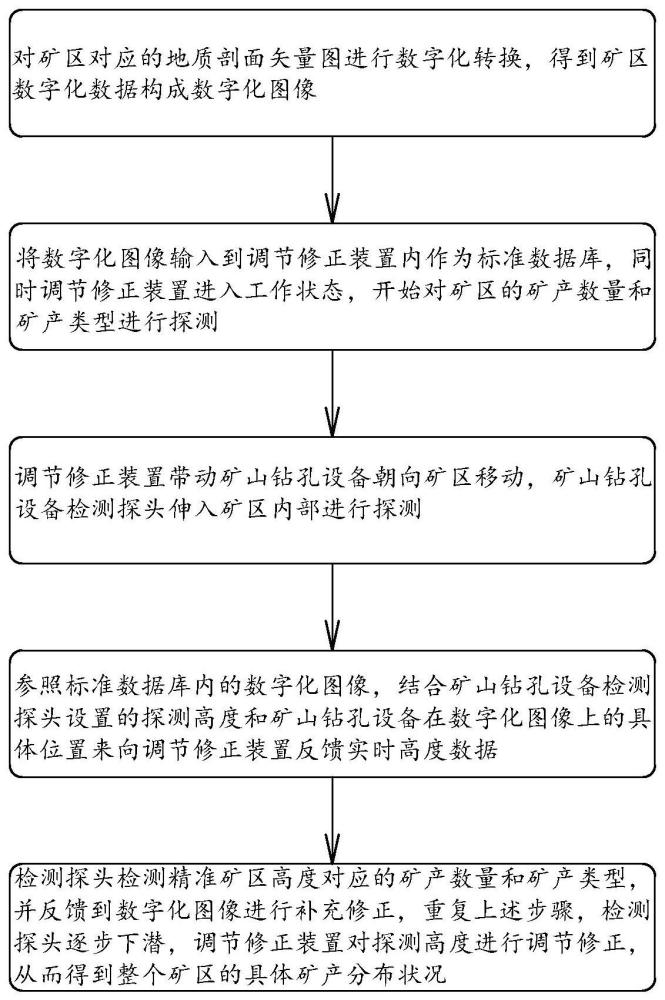
S1,对矿区对应的地质剖面矢量图进行数字化转换,得到矿区数字化数据构成数字化图像;
S2,将数字化图像输入到调节修正装置内作为标准数据库,同时调节修正装置进入工作状态,开始对矿区的矿产数量和矿产类型进行探测;
S3,调节修正装置带动矿山钻孔设备朝向矿区移动,矿山钻孔设备检测探头伸入矿区内部进行探测;
S4,参照标准数据库内的数字化图像,结合矿山钻孔设备检测探头设置的探测高度和矿山钻孔设备在数字化图像上的具体位置来向调节修正装置反馈实时高度数据,进而调节修正装置对矿山钻孔设备检测探头的探测高度和探测方向进行调节修正,得到矿山钻孔设备检测探头所处的精准矿区高度;
S5,检测探头检测精准矿区高度对应的矿产数量和矿产类型,并反馈到数字化图像进行补充修正,重复步骤S1-S4,检测探头逐步下潜,调节修正装置对探测高度进行调节修正,从而得到整个矿区的具体矿产分布状况。
对矿区对应的地质剖面矢量图进行数字化转换,得到矿区数字化数据构成数字化图像包括以下步骤:
S1.1,对地质剖面矢量图进行转换处理,得到每个位置对于的明码格式数据;
S1.2,设置网络时间间隔,根据网络时间间隔将明码格式数据进行提取汇总,得到地质剖面矢量图对应的全部数字化数据;
S1.3,采用定义函数对得到的数字化数据进行筛选,去除重复的数字化数据。
对地质剖面矢量图进行转换处理,得到每个位置对于的明码格式数据包括以下步骤:
S1.1.1,确定地质剖面矢量图的原点,对整个矢量图的坐标形式进行统一设定;
S1.1.2,对地质剖面矢量图的每个区域进行标记;
S1.1.3,获取每个标记区域的岩性文件并转换成明码格式数据。
设置网络时间间隔,根据网络时间间隔将明码格式数据进行提取汇总,得到地质剖面矢量图对应的全部数字化数据包括以下步骤:
S1.2.1,设置相互垂直两个方向的网络时间间隔参数;
S1.2.2,根据网络时间间隔参数,将剖面图进行精细网格化;
S1.2.3,将明码格式数据与精细网格化的剖面图进行结合,加入参照坐标,得到三维层面的数字化数据,得到数字化图像。
将数字化图像输入到调节修正装置内作为标准数据库,同时调节修正装置进入工作状态,开始对矿区的矿产数量和矿产类型进行探测包括以下步骤:
S2.1,将数字化图像转换成高度参数和坐标参数相结合的标准数据库,形成三维数据库;
S2.2,采用坐标参数来确定矿山钻孔设备的钻孔位置,采用高度参数来确定矿山钻孔设备的探测高度;
S2.3,上位机向调节修正装置的控制器传输控制指令,驱动检测探头对矿区进行探测。
参照标准数据库内的数字化图像,结合矿山钻孔设备检测探头设置的探测高度和矿山钻孔设备在数字化图像上的具体位置来向调节修正装置反馈实时高度数据,进而调节修正装置对矿山钻孔设备检测探头的探测高度和探测方向进行调节修正,得到矿山钻孔设备检测探头所处的精准矿区高度包括以下步骤:
S4.1,调节修正装置的计时组件向控制器持续传输时钟脉冲信号,使控制器的每个动作都具有时钟标记;
S4.2,对检测探头设置的探测高度和矿山钻孔设备在数字化图像上的具体坐标参数进行判定;
S4.3,当检测探头设置的探测高度和矿山钻孔设备在数字化图像上的具体坐标参数不一致时,采用修正函数对调节修正装置检测探头的动作进行修正,所述修正函数为:
f(x)=(xlnA
其中,x为具体坐标参数构成向量的模,h为高度参数,A
S4.4,定义修正函数的值域为[0,1],对修正参量进行求解并转换成高度参数和坐标参数相结合的数据形式传输到控制器对检测探头进行调节。
所述调节修正装置包括控制器,所述控制器通过无线收发器和指令输入器与上位机相连,所述控制器通过驱动器与检测探头相连,在控制器上连接有计时器,所述计时器用于向控制器传输时钟脉冲信号以实现实时控制。
所述控制器的型号为STM32F103C8T6,在控制器上设有64个引脚,所述控制器通过四号引脚与指令输入器相连,所述控制器通过二十号引脚和二十一号引脚与无线收发器相连,所述控制器通过三十八号引脚与驱动器相连,所述控制器通过四十号引脚与计时器相连。
所述指令输入器的型号为TLP290,在指令输入器上设有四个引脚,所述指令输入器的一号引脚与上位机相连,在指令输入器的一号引脚和二号引脚之间并联有第九电阻、第十电阻和第四电容,在指令输入器的三号引脚和四号引脚之间并联有第五电容和第八电阻,所述指令输入器的三号引脚与控制器的四号引脚相连;所述无线收发器的型号为ESP8266,在无线收发器上设有8个引脚,所述无线收发器的四号引脚与控制器的二十号引脚相连,所述无线收发器的八号引脚与控制器的二十一号引脚相连。
所述驱动器的型号为ULN2003,在驱动器上设有16个引脚,所述驱动器通过一号引脚与控制器的三十八号引脚相连,在驱动器的十六号引脚上连接有第一继电器,在第一继电器上设有相并联的第一电阻和第一二极管,在第一继电器上设有设备接口,所述设备接口用于连接检测探头;所述计时器的型号为DS1302,在计时器上设有8个引脚,在计时器的六号引脚和七号引脚之间设有第四电阻和第四电容,所述计时器通过七号引脚与控制器的四十号引脚相连。
本发明采用上述结构,通过对矿区对应的地质剖面矢量图进行数字化转换,得到矿区数字化数据构成数字化图像以提供调节修正基础;通过参照标准数据库内的数字化图像,结合矿山钻孔设备检测探头设置的探测高度和矿山钻孔设备在数字化图像上的具体位置来向调节修正装置反馈实时高度数据,进而调节修正装置对矿山钻孔设备检测探头的探测高度和探测方向进行调节修正,得到矿山钻孔设备检测探头所处的精准矿区高度;通过计时器向控制器传输时钟脉冲信号实现实时自动控制;通过指令输入器和无线收发器将控制器和上位机进行电气连接,由工作人员实现远程控制,具有精准实用、动态高效的优点。
附图说明:
图1为本发明的流程示意图。
图2为本发明的调节修正装置的结构示意图。
图3为本发明的实际应用示意图。
图4为本发明的调节修正装置的控制原理图。
图5为本发明的控制器的电气原理图。
图6为本发明的指令输入器的电气原理图。
图7为本发明的无线收发器的电气原理图。
图8为本发明的驱动器的电气原理图。
图9为本发明的计时器的电气原理图。
具体实施方式:
为能清楚说明本方案的技术特点,下面通过具体实施方式,并结合其附图,对本发明进行详细阐述。
如图1-9中所示,基于矢量数字化的矿山钻孔设备用高度调节修正方法,所述调节修正方法包括以下步骤:
S1,对矿区对应的地质剖面矢量图进行数字化转换,得到矿区数字化数据构成数字化图像;
S2,将数字化图像输入到调节修正装置内作为标准数据库,同时调节修正装置进入工作状态,开始对矿区的矿产数量和矿产类型进行探测;
S3,调节修正装置带动矿山钻孔设备朝向矿区移动,矿山钻孔设备检测探头伸入矿区内部进行探测;
S4,参照标准数据库内的数字化图像,结合矿山钻孔设备检测探头设置的探测高度和矿山钻孔设备在数字化图像上的具体位置来向调节修正装置反馈实时高度数据,进而调节修正装置对矿山钻孔设备检测探头的探测高度和探测方向进行调节修正,得到矿山钻孔设备检测探头所处的精准矿区高度;
S5,检测探头检测精准矿区高度对应的矿产数量和矿产类型,并反馈到数字化图像进行补充修正,重复步骤S1-S4,检测探头逐步下潜,调节修正装置对探测高度进行调节修正,从而得到整个矿区的具体矿产分布状况。
对矿区对应的地质剖面矢量图进行数字化转换,得到矿区数字化数据构成数字化图像包括以下步骤:
S1.1,对地质剖面矢量图进行转换处理,得到每个位置对于的明码格式数据;
S1.2,设置网络时间间隔,根据网络时间间隔将明码格式数据进行提取汇总,得到地质剖面矢量图对应的全部数字化数据;
S1.3,采用定义函数对得到的数字化数据进行筛选,去除重复的数字化数据。
对地质剖面矢量图进行转换处理,得到每个位置对于的明码格式数据包括以下步骤:
S1.1.1,确定地质剖面矢量图的原点,对整个矢量图的坐标形式进行统一设定;
S1.1.2,对地质剖面矢量图的每个区域进行标记;
S1.1.3,获取每个标记区域的岩性文件并转换成明码格式数据。
设置网络时间间隔,根据网络时间间隔将明码格式数据进行提取汇总,得到地质剖面矢量图对应的全部数字化数据包括以下步骤:
S1.2.1,设置相互垂直两个方向的网络时间间隔参数;
S1.2.2,根据网络时间间隔参数,将剖面图进行精细网格化;
S1.2.3,将明码格式数据与精细网格化的剖面图进行结合,加入参照坐标,得到三维层面的数字化数据,得到数字化图像。
将数字化图像输入到调节修正装置内作为标准数据库,同时调节修正装置进入工作状态,开始对矿区的矿产数量和矿产类型进行探测包括以下步骤:
S2.1,将数字化图像转换成高度参数和坐标参数相结合的标准数据库,形成三维数据库;
S2.2,采用坐标参数来确定矿山钻孔设备的钻孔位置,采用高度参数来确定矿山钻孔设备的探测高度;
S2.3,上位机向调节修正装置的控制器传输控制指令,驱动检测探头对矿区进行探测。
参照标准数据库内的数字化图像,结合矿山钻孔设备检测探头设置的探测高度和矿山钻孔设备在数字化图像上的具体位置来向调节修正装置反馈实时高度数据,进而调节修正装置对矿山钻孔设备检测探头的探测高度和探测方向进行调节修正,得到矿山钻孔设备检测探头所处的精准矿区高度包括以下步骤:
S4.1,调节修正装置的计时组件向控制器持续传输时钟脉冲信号,使控制器的每个动作都具有时钟标记;
S4.2,对检测探头设置的探测高度和矿山钻孔设备在数字化图像上的具体坐标参数进行判定;
S4.3,当检测探头设置的探测高度和矿山钻孔设备在数字化图像上的具体坐标参数不一致时,采用修正函数对调节修正装置检测探头的动作进行修正,所述修正函数为:
f(x)=(xlnA
其中,x为具体坐标参数构成向量的模,h为高度参数,A
S4.4,定义修正函数的值域为[0,1],对修正参量进行求解并转换成高度参数和坐标参数相结合的数据形式传输到控制器对检测探头进行调节。
所述调节修正装置包括控制器,所述控制器通过无线收发器和指令输入器与上位机相连,所述控制器通过驱动器与检测探头相连,在控制器上连接有计时器,所述计时器用于向控制器传输时钟脉冲信号以实现实时控制。
所述控制器的型号为STM32F103C8T6,在控制器上设有64个引脚,所述控制器通过四号引脚与指令输入器相连,所述控制器通过二十号引脚和二十一号引脚与无线收发器相连,所述控制器通过三十八号引脚与驱动器相连,所述控制器通过四十号引脚与计时器相连。
所述指令输入器的型号为TLP290,在指令输入器上设有四个引脚,所述指令输入器的一号引脚与上位机相连,在指令输入器的一号引脚和二号引脚之间并联有第九电阻、第十电阻和第四电容,在指令输入器的三号引脚和四号引脚之间并联有第五电容和第八电阻,所述指令输入器的三号引脚与控制器的四号引脚相连;所述无线收发器的型号为ESP8266,在无线收发器上设有8个引脚,所述无线收发器的四号引脚与控制器的二十号引脚相连,所述无线收发器的八号引脚与控制器的二十一号引脚相连。
所述驱动器的型号为ULN2003,在驱动器上设有16个引脚,所述驱动器通过一号引脚与控制器的三十八号引脚相连,在驱动器的十六号引脚上连接有第一继电器,在第一继电器上设有相并联的第一电阻和第一二极管,在第一继电器上设有设备接口,所述设备接口用于连接检测探头;所述计时器的型号为DS1302,在计时器上设有8个引脚,在计时器的六号引脚和七号引脚之间设有第四电阻和第四电容,所述计时器通过七号引脚与控制器的四十号引脚相连。
本发明实施例中的基于矢量数字化的矿山钻孔设备用高度调节修正方法的工作原理为:基于地质剖面图矢量数字化的处理算法和多个功能组件的相互配合作用,设置对应的参考数据,对矿山钻孔设备检测探头所处的矿区高度和钻孔位置进行准确识别,避免周围外界环境对矿产资源探测带来的影响,减少操作误差,保证探测结果精准可靠;同时形成闭环自动循环控制,可进行实时调节控制,提升整体自动化进程和矿产探测效率,可以适用于多种不同地域和不同类型的矿区探测和开采。
一般情况下,矿山钻孔设备的工作方向为竖直向下,但在一些特定的应用场景下,工作方向还会出现变化,而本申请对于所有的应用场景均可进行适用,只需要对参考坐标系转化成极坐标即可。
同时由于矿产资源的特殊性,考虑到矿区探测开采的安全,本申请可以对地质剖面矢量图进行精准数字化转换处理,避免由于人工操作误差而带来的安全隐患。
在整体方案中,主要包括以下步骤:对矿区对应的地质剖面矢量图进行数字化转换,得到矿区数字化数据构成数字化图像;将数字化图像输入到调节修正装置内作为标准数据库,同时调节修正装置进入工作状态,开始对矿区的矿产数量和矿产类型进行探测;调节修正装置带动矿山钻孔设备朝向矿区移动,矿山钻孔设备检测探头伸入矿区内部进行探测;参照标准数据库内的数字化图像,结合矿山钻孔设备检测探头设置的探测高度和矿山钻孔设备在数字化图像上的具体位置来向调节修正装置反馈实时高度数据,进而调节修正装置对矿山钻孔设备检测探头的探测高度和探测方向进行调节修正,得到矿山钻孔设备检测探头所处的精准矿区高度;检测探头检测精准矿区高度对应的矿产数量和矿产类型,并反馈到数字化图像进行补充修正,重复上述步骤,检测探头逐步下潜,调节修正装置对探测高度进行调节修正,从而得到整个矿区的具体矿产分布状况,形成闭环控制形式,配合自动控制按照既定的顺序进行精准执行。
对于将矿区对应的地质剖面矢量图进行数字化转换,主要包括以下步骤:对地质剖面矢量图进行转换处理,得到每个位置对于的明码格式数据;设置网络时间间隔,根据网络时间间隔将明码格式数据进行提取汇总,得到地质剖面矢量图对应的全部数字化数据;采用定义函数对得到的数字化数据进行筛选,去除重复的数字化数据,进而将矢量数据转换成直观的数字化数据,方便进行处理和运算。
进一步的,数字化数据一般都需要配置坐标系来进行运算,在本申请中,由于参照检测探头的工作方向,可设置极坐标系来简化数据处理运算的进程,参照极坐标的夹角,保证处理数据精准一致。
对于将数字化图像输入到调节修正装置内作为标准数据库,同时调节修正装置进入工作状态,开始对矿区的矿产数量和矿产类型进行探测,主要包括以下步骤:将数字化图像转换成高度参数和坐标参数相结合的标准数据库,形成三维数据库;采用坐标参数来确定矿山钻孔设备的钻孔位置,采用高度参数来确定矿山钻孔设备的探测高度;上位机向调节修正装置的控制器传输控制指令,驱动检测探头对矿区进行探测,使钻孔位置和探测高度都可以进行准确量化,保证检测探头的探测动作精准可靠,按照工作人员的实际需求进行准确调节,控制器的集成作用可有效防止出现误操作。
参照标准数据库内的数字化图像,结合矿山钻孔设备检测探头设置的探测高度和矿山钻孔设备在数字化图像上的具体位置来向调节修正装置反馈实时高度数据包括以下步骤:调节修正装置的计时组件向控制器持续传输时钟脉冲信号,使控制器的每个动作都具有时钟标记;对检测探头设置的探测高度和矿山钻孔设备在数字化图像上的具体坐标参数进行判定;当检测探头设置的探测高度和矿山钻孔设备在数字化图像上的具体坐标参数不一致时,采用修正函数对调节修正装置检测探头的动作进行修正,所述修正函数为:
f(x)=(xlnA
其中,x为具体坐标参数构成向量的模,h为高度参数,A
定义修正函数的值域为[0,1],对修正参量进行求解并转换成高度参数和坐标参数相结合的数据形式传输到控制器对检测探头进行调节。
在修正函数的作用下,将修正参数、高度参数和坐标参数进行统一设置运算处理,可以在出现差异时进行快速准确修正;由于本申请的调节修正方法是一种闭环控制形式,因此数据的更新时效和更新准度是必要的运算基础,修正函数可以将修正参数与高度参数和坐标参数进行有效联立,即使在环境较为复杂的矿区也能进行适用;相比较现有常规直接修正覆盖之前输入数据的方式,更为合理,适配性更高。
优选的,调节修正装置包括控制器,所述控制器通过无线收发器和指令输入器与上位机相连,所述控制器通过驱动器与检测探头相连,在控制器上连接有计时器,所述计时器用于向控制器传输时钟脉冲信号以实现实时控制。
控制器的型号为STM32F103C8T6,在控制器上设有64个引脚,所述控制器通过四号引脚与指令输入器相连,所述控制器通过二十号引脚和二十一号引脚与无线收发器相连,所述控制器通过三十八号引脚与驱动器相连,所述控制器通过四十号引脚与计时器相连,从而构成了整体硬件电路,并依靠整体硬件电路来实现“上位机-控制器-检测探头”的一体化精准控制。
优选的,指令输入器的型号为TLP290,在指令输入器上设有四个引脚,所述指令输入器的一号引脚与上位机相连,在指令输入器的一号引脚和二号引脚之间并联有第九电阻、第十电阻和第四电容,在指令输入器的三号引脚和四号引脚之间并联有第五电容和第八电阻,所述指令输入器的三号引脚与控制器的四号引脚相连;所述无线收发器的型号为ESP8266,在无线收发器上设有8个引脚,所述无线收发器的四号引脚与控制器的二十号引脚相连,所述无线收发器的八号引脚与控制器的二十一号引脚相连,可以在控制器和上位机之间建立网络通讯连接和指令传输通道,保证数据传输的精准度和连续性。
优选的,所述驱动器的型号为ULN2003,在驱动器上设有16个引脚,所述驱动器通过一号引脚与控制器的三十八号引脚相连,在驱动器的十六号引脚上连接有第一继电器,在第一继电器上设有相并联的第一电阻和第一二极管,在第一继电器上设有设备接口,所述设备接口用于连接检测探头;所述计时器的型号为DS1302,在计时器上设有8个引脚,在计时器的六号引脚和七号引脚之间设有第四电阻和第四电容,所述计时器通过七号引脚与控制器的四十号引脚相连。
特别说明的是,本申请的调节修正方法属于一种闭环控制方式,将冗杂的矿区数据转换成直观的高度参数或坐标参数,采用相关联的算法将矢量图与数据进行联立和运算,兼顾实时性和精准度,可以适用于大多数的矿区应用场景和矿山钻孔设备。
综上所述,本发明实施例中的基于矢量数字化的矿山钻孔设备用高度调节修正方法基于地质剖面图矢量数字化的处理算法和多个功能组件的相互配合作用,设置对应的参考数据,对矿山钻孔设备检测探头所处的矿区高度和钻孔位置进行准确识别,避免周围外界环境对矿产资源探测带来的影响,减少操作误差,保证探测结果精准可靠;同时形成闭环自动循环控制,可进行实时调节控制,提升整体自动化进程和矿产探测效率,可以适用于多种不同地域和不同类型的矿区探测和开采。
上述具体实施方式不能作为对本发明保护范围的限制,对于本技术领域的技术人员来说,对本发明实施方式所做出的任何替代改进或变换均落在本发明的保护范围内。
本发明未详述之处,均为本技术领域技术人员的公知技术。