具埋入式感测器的机械手臂承载装置
文献发布时间:2024-01-17 01:17:49
技术领域
本发明与机械手臂有关,特别是指一种具埋入式感测器的机械手臂承载装置。
背景技术
在半导体的领域中,由于涉及晶圆的作业需要精确无误差的操作,因此业界普遍在制程中使用由电脑控制的机械手臂来执行搬运晶圆的作业。虽然机械手臂是利用电脑控制,但有时候还是会因突发状况而导致机械手臂产生不正常的动作如振动或偏摆,这些不正常的动作都会影响搬运晶圆时的精度,轻则影响搬运的那片晶圆,严重的话甚至会影响到整个制程中的晶圆。因此为了确保机械手臂的准确度,业者会在机械手臂上安装可以感测振动或位移的感测器,随时感应机械手臂是否保持正常的位置。一旦不正常的振动或位移产生偏差时,感测器会产生一讯号传输至主机中,进而提醒工程师或控制软体机械手臂的问题,将晶圆制程中的不确定因素降低。
过去在机械手臂上设置感测器的技术已有相关研发,如一种装置稳定性监控系统,系为一侦测装置安装于一机械手臂的表面,用以即时监控机械手臂的振动及水平状况,然后透过一告警模组在超过范围时发出告警讯息;另一种感测装置及感测系统,包含一感测装置安装在机械手臂的机身、底座或靠近马达的表面,利用该感测装置的振动讯号来判断机械或机台是否有异常;更有一种可预先侦测机械手臂及帮浦异常的装置,包含有复数个感测器设置在机械手臂的连动机构的表面,透过收集机械手臂的位移或振动资讯与资料库比对是否有异常讯号,并在异常讯号发出时回传给主机预先警示。
然,前述用于机械手臂的感测装置都是安装在机械手臂的表面,因此会遇到几个问题:第一是晶圆之间的作业空间随着晶圆尺寸的缩小而变小。举例而言12吋晶圆的作业空间大约为10mm,而到了6吋晶圆其作业空间仅剩4.6mm左右,因此机械手臂在如此微小的作业空间中,无法再容置具有一定厚度的感测器在其表面;然而当感测器设置在远离晶圆的位置时,又无法直接的接收机械手臂与晶圆的接触端传来的振动,在产生相对应的振动或位移的讯号上可能会有些微的误差,而短时间的误差即有可能使机械手臂撞到晶圆;再来,裸露于机械手臂表面的感测器有可能被制程中产生的污染物(化学、粉尘、静电等)影响而干扰到讯号的判断,感测器本身也有可能在运作时产生污染物而污染到晶圆的制程环境。因此,如何在极小的作业空间中也能在不污染环境的情况下安装感测器在机械手臂与晶圆的接触范围内而不影响到机械手臂的运行,是相关领域的业者亟待解决的问题。
发明内容
本发明的主要发明目的在于提供一种具埋入式感测器的机械手臂承载装置,其可以在不影响机械手臂的承载装置的厚度的情况下,提升振动的感测灵敏度与精准度。
为达成上述的发明目的,本发明所提供的一种具埋入式感测器的机械手臂承载装置,包含有:一本体,内部具有一第一容置空间;一感测单元,设于该本体的该第一容置空间内,该感测单元用以感测该本体的振动程度;以及一封盖,设于该本体的该第一容置空间的顶面,使该感测单元位于该本体与该封盖之间;该封盖用以防止该感测单元与外界接触;借此,当驱动该本体进入一工作空间运作时,该感测单元位于该工作空间的范围内,在侦测到该本体的振动后产生一相对应的振动讯号,并传输至一数位装置。
在一实施例中,该本体更具有一第二容置空间连通于该第一容置空间;一传输线容置于该凹槽的该第二容置空间内,一端电性连接于该感测单元。
在一实施例中,该本体更具有一第三容置空间,连通于该第一容置空间及该第二容置空间,令该第一容置空间及该第二容置空间的顶面连接于该第三容置空间;该封盖容置于该本体的该第三容置空间。
在一实施例中,该本体更设有复数个穿孔贯穿该第三容置空间;该封盖更设有复数个锁孔对应于该穿孔,使该封盖可透过复数个锁固件穿设于该等穿孔及该等锁孔以锁固于该本体。
在一实施例中,该感测单元的厚度小于等于该本体的厚度。
在一实施例中,该本体的厚度不超过3mm。
在一实施例中,更包含有复数个止滑件设于该本体的顶面,该等止滑件彼此相离,用以增加该本体的摩擦力。
在一实施例中,该等止滑件为二吸盘;该本体更具有一气流通道,其中两端分别连接于该二吸盘,另一端连接于一抽气单元。
在一实施例中,该封盖同时覆盖该第一容置空间及该气流通道。
在一实施例中,该本体为叉状,具有一柄部及二叉部,该二叉部自该柄部的一端延伸,且该二叉部彼此间隔一预定距离;该二止滑件分别设于该二叉部。
本发明的有益效果:根据上述技术手段所产生的功效在于解决了如何在微小的工作空间中也能更灵敏而直接的感测机械手臂的承载装置的振动程度,并防止感测单元污染环境或被环境污染的可能性。
附图说明
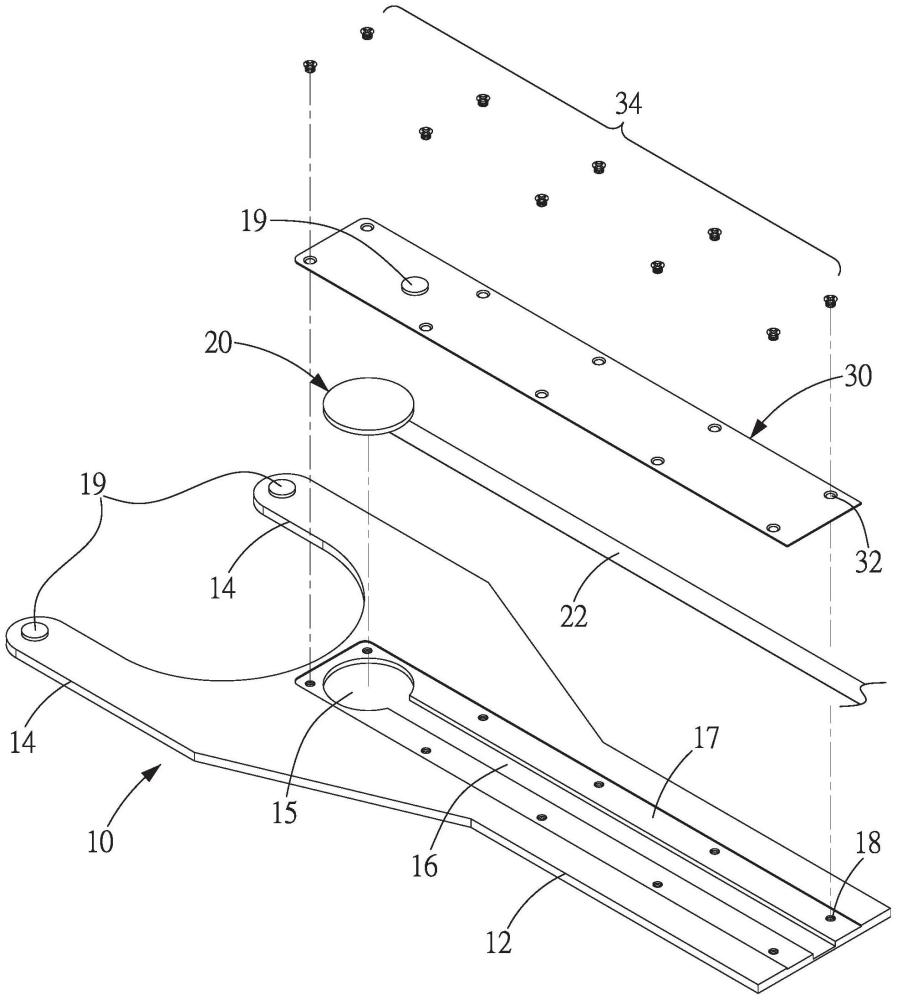
图1为本发明第一较佳实施例的分解图。
图2为本发明第一较佳实施例的立体图。
图3为本发明第一较佳实施例的侧视示意图,显示搬运晶圆时的状况。
图4为本发明第一较佳实施例的顶视示意图,显示感测单元在晶圆的范围内。
图5为本发明第二较佳实施例移除封盖的顶视图。
图6为本发明第二较佳实施例加上封盖的顶视图。
1晶圆
2工作空间
3数位装置
10本体
12柄部
14叉部
15第一容置空间
16第二容置空间
17第三容置空间
18穿孔
19止滑件
20感测单元
22传输线
30封盖
32锁孔
34锁固件
40气流通道
42抽气单元
401第一端
402第二端
具体实施方式
请参阅图1及图2所示,本发明的第一较佳实施例所提供的具埋入式感测器的机械手臂承载装置其主要包含有:一本体10、一感测单元20及一封盖30。
该本体10为一机械手臂的承载装置,用以承载并搬运晶圆1。在本实施例中该本体10 为一厚度不超过3mm的牙叉,其外型概呈叉状,具有一体成形的一柄部12及二叉部14。其中该柄部12的宽度从中央朝一端逐渐变宽,该二叉部14从该柄部12较宽的一端的相对两侧朝远离该柄部12的方向延伸,且该二叉部14彼此间隔一预定距离。该本体10具有一第一容置空间15、一第二容置空间16及一第三容置空间17,该第一容置空间15概呈圆形,位于该柄部12较宽的一端处;该第二容置空间16概呈细长条状,连通于该第一容置空间15;该第三容置空间17概呈矩形,连通至该第一容置空间15及该第二容置空间16,令该第一容置空间15与该第二容置空间16连接于该第三容置空间17的底面,且该第三容置空间17的深度小于该第一容置空间15及该第二容置空间16的深度。该本体10设有复数个穿孔18贯穿该第三容置空间17。该本体10更具有复数止滑件19设于该本体10的表面,用以提供摩擦力以防止在搬运晶圆的过程中晶圆相对该本体10滑动。在本实施例中,该等止滑件19为复数个概呈圆形的止滑垫,设于该本体10的端部,具体而言,该等止滑垫的其中二者分别设于该二叉部14的一端,另外一者设于接近该柄部12较宽的一端处。
该感测单元20为一极薄的电子元件以埋入的方式设置于该本体10。具体而言,该感测单元20容置于该第一容置空间15内,且在本实施例中该感测单元20的厚度小于等于该第一容置空间15的深度,因此当该感测单元20容置于该第一容置空间15时,该感测单元20的高度不超过该本体10的高度,使该本体10的厚度可维持原本厚度。在本实施例中,该感测单元20为一微机电型加速度规(Microelectromechanical Systems,MEMS),用以感测晶圆搬运过程中该本体10因位移所产生的振动,并产生一振动讯号。当该振动讯号产生时,该感测单元20透过有线或无线的方式将该振动讯号传输至一数位装置(图未视)如电脑进行数据的分析及处理。在本实施例中,一传输线22容置于该第二容置空间16内,其厚度不超过该第二容置空间16的深度。该传输线22一端电性连接于该感测单元20,另一端连接该数位装置,用以传输自该感测单元20产生的振动讯号至该数位装置。在其他实施例中,该感测单元亦可搭配一无线传输装置如蓝芽或远红外线等方式将该振动讯号传输至该数位装置。
该封盖30为设于该本体10的表面对应于该第三容置空间17的一薄片。在本实施例中,该封盖30的材质为铝片。其外型对应于该第三容置空间17的外型,使其以可拆离的方式固定于该第三容置空间17,借以完整封闭该第一容置空间15及该第二容置空间16,使该第一容置空间15内的该感测单元20及该第二容置空间16内的该传输线22与外界隔绝。针对该封盖30与该第三容置空间17的固定方式,在本实施例中,该封盖30具有复数个锁孔32对应于该本体10的该等穿孔18,使该封盖30可透过复数个锁固件34贯穿该等锁孔32与该等穿孔18 并锁固于该本体10的该第三容置空间17。在另一实施例中,该封盖30可利用焊接,卡榫或其他等效的固定方式固定于该本体10的第三容置空间17。
借由上述各元件结构所组合而成的本发明,是在提供一种具埋入式感测器的机械手臂承载装置。其实际操作应用如下:
请参阅图3及图4所示,由于该感测单元20以埋入式设置于该本体10的内部,因此不影响该本体10的实际厚度。当该本体10伸入二晶圆1之间的一工作空间2中欲搬运该等晶圆1 时,该感测单元20可随之进入欲搬运的该晶圆1的范围内。借此当该本体10产生振动时,该感测单元20随即产生一相对应的振动讯号,并透过该传输线22传输至一数位装置3进行处理,透过该数位装置3中的程式软体与资料库的数据进行分析比对,判断该本体10是否处于异常状态。借由该感测单元20的埋入式设计,让该本体10的厚度可维持在一定大小(不超过3mm),使其可以在狭小的该工作空间中(如图6晶圆的工作空间大约为4.6mm)进行作业;另外,设置于该本体10表面的封盖30,亦可达到隔绝该感测单元20与外界接触,借此防止该感测单元20污染环境或是被环境污染,提高该感测单元20的可靠度与整体环境的安全性。
请参阅图5及图6所示,本发明的第二较佳实施例所提供的具埋入式感测器的机械手臂承载装置,其结构与第一较佳实施例的结构类似,但该本体10的该止滑件19替换为复数个吸盘。该等吸盘概呈中空状,其中二者分别设置于该本体10的该二叉部14的一端;另外一者设于柄部12较宽的一端。其中,该本体10更设有一气流通道40,具有呈开放状的复数个第一端401及一第二端402;该复数第一端401连通于该复数吸盘,该第二端402连通于一抽气单元42。另外,在本实施例中,该第三容置空间17更连通于该气流通道40,令该气流通道40连接于该第三容置空间17的底面。该封盖30的外型对应于该第三容置空间17的外型,因此在覆盖该感测单元20与该传输线22的同时可覆盖住该气流通道40,防止外界的污染物进入该气流通道40内,亦防止该气流通道40内的污染物污染外界的工作环境。
本实施例提供了另一种用于固定晶圆的方法,透过该抽气单元42将该气流通道40内的空气抽走,进而使该等吸盘产生一吸力吸附住晶圆以方便搬运。要补充的一点是,在另一实施例中,更可以在该本体10上同时安装第一较佳实施例的止滑垫及第二较佳实施例的吸盘,增加该本体10固定晶圆的稳定性。
要补充说明的是,本发明的该本体10并不局限于本实施方式所述的叉状外观,亦可应用于方形、椭圆形甚至是其他几何图形或不规则形状的外观。
要补充说明的是,本发明并不局限于本实施方式所述的该本体10与该封盖30为两件式夹置该感测单元20于二者之间。在其他实施例中,该本体与该封盖亦可以一体成形的方式 (如射出成形)夹置该感测单元于其内部。
综上所述,本发明所提供的具埋入式感测器的机械手臂承载装置,透过设置于该本体 10内部的该第一容置空间15及埋入该第一容置空间15的该感测单元20,使该本体10在不改变原本厚度的情况下,该感测单元20可以设置在晶圆范围内的位置,借此可产生更灵敏与直接的振动讯号;该封盖30的设计也解决了该感测单元20被环境污染或是污染环境的问题,提升该感测单元20的准确度与维护工作环境的干净;该本体10更可以透过该止滑件19 稳定的承载并搬运晶圆。因此,本发明有效解决了如何在微小的工作空间更灵敏且精准的感测机械手臂的承载装置的振动程度,并防止感测单元污染环境或被环境污染的可能性。
上述实施例仅为例示性说明本发明的技术及其功效,而非用于限制本发明。任何熟于此项技术人士均可在不违背本发明的技术原理及精神的情况下,对上述实施例进行修改及变化,因此本发明的权利保护范围应如后所述的申请专利范围。