一种具有垂直导轨可大角度旋转的五自由度并联机构
文献发布时间:2024-04-18 19:48:15
技术领域
本发明属于并联机构技术领域,特别是涉及一种具有垂直导轨可大角度旋转的五自由度并联机构。
背景技术
并联机构是由动平台和若干与机架相连的支链以并联方式组成的复杂机械系统,因其具有种类多、稳定性好等诸多优点而被广泛应用于智能装备等方面,但随着工作量的增加和工作载荷的加大,探寻更大工作空间和更高刚度的并联机构越来越受到学者们的关注。
机构中垂直轨道的存在能满足机构方向移动的精准性,还可以实现大角度旋转从而实现可观的工作空间。连接杆多为板状杆,进一步增加了机构的刚度,具有极大的应用前景。
发明内容
为了解决上述问题,本发明的目的在于提供一种具有垂直导轨可大角度旋转的五自由度并联机构。
为了达到上述目的,本发明提供的具有垂直导轨可大角度旋转的五自由度并联机构包括固定底座、垂直轨道、动平台、第一支链、第二支链、第三支链、第四支链和第五支链;其中,所述的固定底座为长方形板状,水平设置,其上布置有三个虎克铰;垂直轨道位于第三支链对侧边,包括两条相互垂直的直线导轨;第一支链和第二支链中的虎克铰关于yz平面对称布置,两个虎克铰位于固定底座两侧边;第三支链中虎克铰的中心位于y轴负方向上;动平台为矩形板状,在其四个侧面分别固接三个球铰支座、第一转动副支座和第二转动副支座;第一支链、第二支链、第三支链结构完全相同,包括虎克铰、第一伸缩杆、第一球铰,三条支链的一端由虎克铰与固定底座连接,另一端由第一球铰与动平台连接;第四支链是由第一连接杆、第二连接杆、第一滑块组成,一端由第一滑块与垂直轨道中的横梁式轨道以移动副连接,另一端由第一连接杆与动平台以虎克铰连接;第五支链包括第二滑块、第二伸缩杆和第二球铰,一端由第二滑块与垂直轨道中的立柱式轨道以移动副连接;第一连接杆和第二连接杆的两端均为转动副;第二连接杆与第一滑块以转动副连接;第二伸缩杆和第二滑块以转动副连接。
所述的垂直轨道的安装方式亦可根据实际工况设计成并行式。
所述的垂直轨道可实现第四支链和第五支链两个方向的移动,从而可配合第一支链、第二支链、第三支链实现动平台的大角度旋转。
所述的第一连接杆、第二连接杆代替了传统圆柱杆,且两端均为转动副。
所述的第一连接杆、第二连接杆所有的转动副轴线平行。
本发明提供的具有垂直导轨可大角度旋转的五自由度并联机构有以下优点:
1、垂直导轨的存在可实现动平台的大角度旋转,在一定程度上增加了机构的工作空间。
2、机构中所用连接杆均为方形杆及板状杆,代替了传统圆柱杆,提高了机构的整体刚度。
3、第一支链、第二支链、第三支链组成结构完全相同,降低了整体并联机构的制造和装配难度。
附图说明
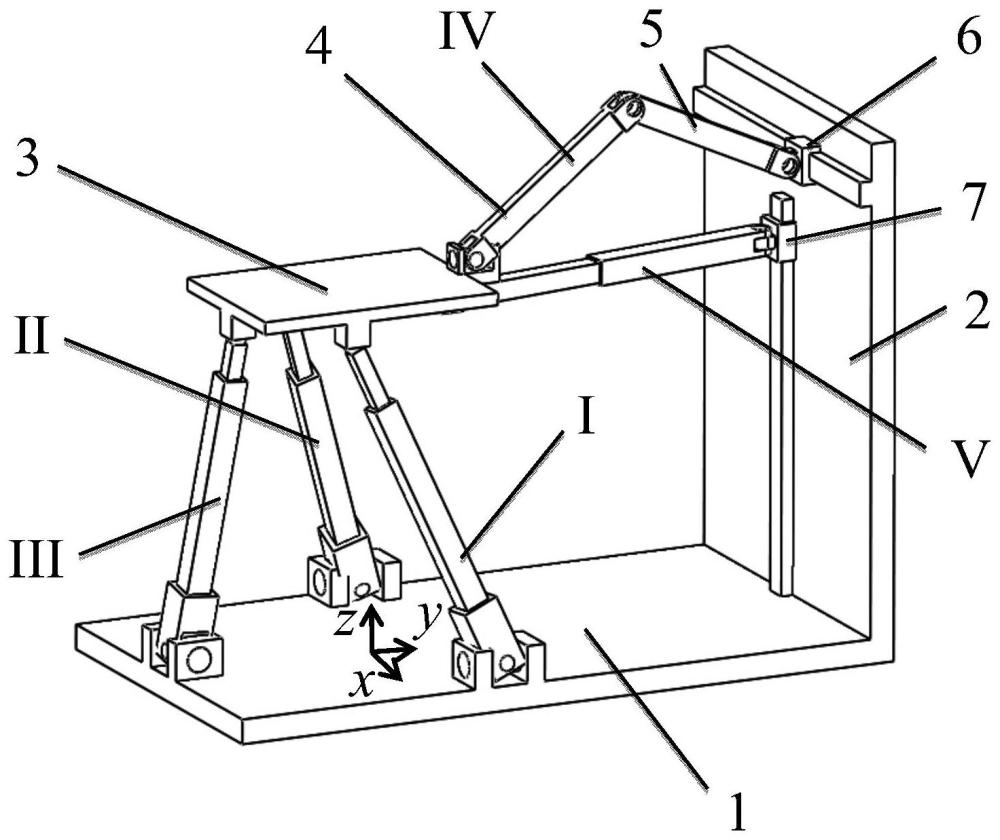
图1为本发明提供的具有垂直导轨可大角度旋转的五自由度并联机构立体图1。
图2为本发明提供的具有垂直导轨可大角度旋转的五自由度并联机构立体图2。
图3为本发明提供的具有垂直导轨可大角度旋转的五自由度并联机构俯视图。
图4为本发明提供的具有垂直导轨可大角度旋转的五自由度并联机构的动平台立体图。
图5为本发明提供的具有垂直导轨可大角度旋转的五自由度并联机构的第一支链结构立体图。
图6为本发明提供的具有垂直导轨可大角度旋转的五自由度并联机构的第五支链伸缩杆整体结构立体图。
图7为本发明提供的具有垂直导轨可大角度旋转的五自由度并联机构的第一连接杆立体图。
图8为本发明提供的具有垂直导轨可大角度旋转的五自由度并联机构的第二连接杆立体图。
具体实施方式
下面结合附图和具体实施例对本发明提供的具有垂直导轨可大角度旋转的五自由度并联机构进行详细说明。
如图1—图8所示,本发明提供的具有垂直导轨可大角度旋转的五自由度并联机构包括固定底座1、垂直轨道2、动平台3、第一支链Ⅰ、第二支链Ⅱ、第三支链Ⅲ、第四支链Ⅳ和第五支链V;其中,所述的固定底座1为长方形板状,水平设置,其上布置有三个虎克铰13;垂直轨道2位于第三支链Ⅲ对侧边,包括两条相互垂直的直线导轨;第一支链Ⅰ和第二支链Ⅱ中的虎克铰13关于yz平面对称布置,两个虎克铰13位于固定底座1两侧边;第三支链Ⅲ中虎克铰13的中心位于y轴负方向上;动平台3为矩形板状,在其四个侧面分别固接三个球铰支座8、第一转动副支座9和第二转动副支座10;第一支链Ⅰ、第二支链Ⅱ、第三支链Ⅲ结构完全相同,包括虎克铰13、第一伸缩杆14、第一球铰15,三条支链的一端由虎克铰13与固定底座1连接,另一端由第一球铰15与动平台3连接;第四支链Ⅳ是由第一连接杆4、第二连接杆5、第一滑块6组成,一端由第一滑块6与垂直轨道2中的横梁式轨道以移动副连接,另一端由第一连接杆4与动平台3以虎克铰连接;第五支链V包括第二滑块7、第二伸缩杆11和第二球铰15,一端由第二滑块7与垂直轨道2中的立柱式轨道以移动副连接;第一连接杆4和第二连接杆5的两端均为转动副;第二连接杆5与第一滑块6以转动副连接;第二伸缩杆11和第二滑块7以转动副连接。
所述的垂直轨道2的安装方式亦可根据实际工况设计成并行式。
所述的垂直轨道2可实现第四支链Ⅳ和第五支链V两个方向的移动,从而可配合第一支链Ⅰ、第二支链Ⅱ、第三支链Ⅲ实现动平台3的大角度旋转。
所述的第一连接杆4、第二连接杆5代替了传统圆柱杆,且两端均为转动副。
所述的第一连接杆4、第二连接杆5所有的转动副轴线平行。
本实施例提供的具有垂直导轨可大角度旋转的五自由度并联机构选取第一支链Ⅰ、第二支链Ⅱ、第三支链Ⅲ的移动副以及第四支链Ⅳ和第五支链V滑块所在的移动副作为主动副,依靠彼此之间的移动配合来实现五自由度。工作原理如下:利用驱动装置驱动第一支链Ⅰ、第二支链Ⅱ、第三支链Ⅲ和第四支链Ⅳ的主动副同向移动,锁定第五支链V的主动副,从而实现x方向的移动;锁定第四支链Ⅳ和第五支链V的主动副,利用驱动装置驱动第一支链Ⅰ、第二支链Ⅱ、第三支链Ⅲ同向移动,从而实现y方向的移动;利用驱动装置驱动第一支链Ⅰ、第二支链Ⅱ、第三支链Ⅲ和第五支链V的主动副同向移动,锁定第四支链Ⅳ的主动副,从而实现z方向的移动;锁定第一支链Ⅰ、第二支链Ⅱ、第四支链Ⅳ和第五支链V的主动副,驱动第三支链Ⅲ的主动副,从而实现绕x方向的移动;锁定第三支链Ⅲ、第四支链Ⅳ和第五支链V的主动副,驱动第一支链Ⅰ和第二支链Ⅱ的主动副异向运动,从而实现绕y方向的移动。最终,整个并联机构实现三个移动和两个转动共五个自由度。