利用量子限域超流体效应的多重响应驱动器的制备方法及应用
文献发布时间:2024-01-17 01:13:28
技术领域
本发明涉及驱动器技术领域,具体为一种利用量子限域超流体效应的多重响应驱动器的制备方法及应用。
背景技术
驱动器是微机械系统、智能机器人等智能器件的核心部件。在各种驱动器结构中,双层结构型驱动器应用最为广泛,其基本原理是将智能材料与惰性材料相结合,形成活性层/惰性层双层结构。当施以外界刺激(湿度、光、电、温度、pH等)时,两种材料会发生不同程度的响应,界面处的应变失配就会导致朝向惰性材料一侧的弯曲形变,通过合理设计便可以实现抓取、折叠、运动等驱动效果。但是环境中的刺激信号多种多样,刺激响应的单一会大大限制驱动器的实际应用。传统制备多重响应驱动器的思路是集成多种智能材料,构建多层结构。然而,多层结构型驱动器存在层间结合力弱的问题,会降低器件的稳定性。因此,为了更好地控制和使用驱动器,还需要一种简单、高效的制备方法来获得具有高稳定性和多重响应特性的驱动器。
发明内容
本发明为了解决现有技术中制备多重响应驱动器采用多层结构,使得结合力弱、稳定性较差的问题,提供了一种利用量子限域超流体效应的多重响应驱动器的制备方法及应用。
本发明是通过如下技术方案来实现的:一种利用量子限域超流体效应的多重响应驱动器的制备方法,具体步骤如下:
(1)MXene溶液的制备;
①在聚四氟乙烯烧杯中加入20~25 mL盐酸,然后缓慢添加1~2 g氟化锂,加入完成后搅拌30 min;
②将2 g MAX-Ti
③将步骤②中获得的反应液体倒入离心管中,以10000~12000 rpm的转速离心10~15 min,离心后将上清液倒掉,继续向离心管的沉淀中分别加入去离子水并混合均匀,然后将离心管放入大功率超声机中超声10~15 min,取出后继续离心,转速10000~12000 rpm,时间10~15 min,重复若干次,直到离心后倒出的液体pH值到5~6;
④将离心管中的残留上层液体倒出,真空烘箱烘干下层沉淀后,在离心管中加入乙醇20~40 mL并超声1 h,然后以10000~12000 rpm的转速离心10~15 min,收集下层沉淀物;
⑤向步骤④中离心的沉淀产物中加入20~25 mL去离子水,摇匀,然后超声20~30min后,以3000~4000 rpm的转速离心3~5 min,收取黑棕色上层液为少层分散液;
⑥反复进行步骤⑤,收取更多的少层分散液;
⑦取分散液8~10 mL 进行抽滤,干燥后称量重量,获得MXene分散液浓度值;
(2)MXene薄膜驱动器的制备;
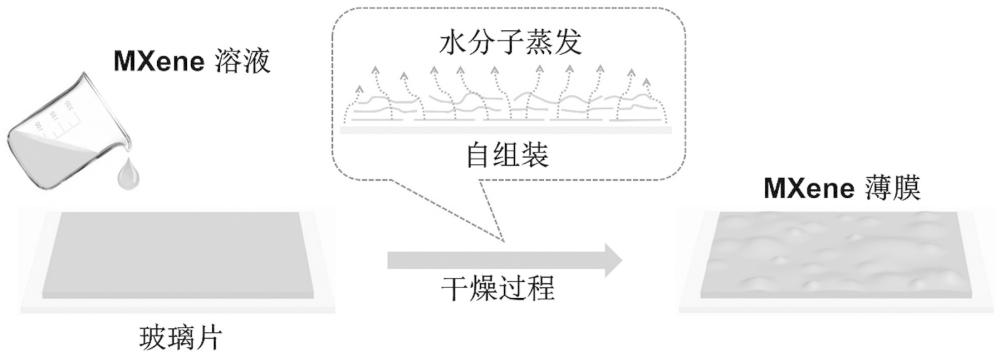
具体步骤为:取MXene分散液滴涂到玻璃片衬底上,旁边放置鼓风机,采用鼓风的方式在室温下晾干;然后,从玻璃片上将MXene薄膜揭下来,MXene纳米片层层堆叠形成量子限域超流体通道,MXene薄膜驱动器制备完成。此处鼓风机的作用是加速薄膜上表面空气的流动,促进水分子的快速蒸发,从而诱导出更为明显的非对称的量子限域超流体通道。
一种利用量子限域超流体效应的多重响应驱动器的应用,所述驱动器采用上述方法进行制备,制备完成后,首先将MXene薄膜切成条带;然后,分别施加不同的外界刺激,并测试在对应刺激下的响应性能,正是因为有了这些驱动响应,才使得利用量子限域超流体效应的多重响应驱动器可以应用于多个领域,MXene薄膜驱动器的多场驱动响应具体如下:
①湿度场驱动:对该MXene薄膜驱动器施加湿度;由于MXene表面含有大量的含氧基团,因此在湿度条件下可以吸附水分子进而发生膨胀,而MXene薄膜上下两侧非对称量子限域超流体通道的存在影响了MXene薄膜两侧对水分子的吸附能力,导致MXene薄膜两侧膨胀程度不同,进而产生朝向平整一侧的弯曲形变;当去除湿度时,由于水分子的脱附,薄膜可逆的恢复到原来平直的形状;因此,MXene薄膜驱动器实现了湿度场驱动;
②光场驱动:MXene自身优异的光热转换特性使得MXene薄膜驱动器可以在光刺激下发生响应,当施加光场时,MXene薄膜将光能转换为热能使得温度升高,促进水分子的脱附;非对称量子限域超流体通道的存在也会影响MXene薄膜两侧水分子的脱附能力,从而使得薄膜在光驱动下朝着反向弯曲,也就是朝着褶皱多的一侧发生弯曲;当去除光场时,薄膜通过吸附环境中的水分子又可以恢复到初始状态;这样便实现了光场驱动;
③电场驱动:MXene还具有优异的导电性和电热转换能力。当给MXene薄膜驱动器施加电场时,MXene将电能转化为焦耳热从而使得MXene薄膜温度升高,促进水分子的脱附;非对称量子限域超流体通道的存在会造成水分子发生非对称的脱附,进而引起MXene薄膜非对称的收缩,最终使得MXene薄膜朝着褶皱多的一侧发生弯曲;同样地,当去除电场后,薄膜通过吸附环境中的水分子恢复到初始状态;因此,MXene薄膜驱动器实现了电场驱动。
本发明所提供的一种利用量子限域超流体效应的多重响应驱动器的制备方法,最终将MXene溶液直接滴涂在玻璃片上,然后在室温下晾干成膜。在此过程中通过鼓风机加速薄膜上方的空气流动,加快水分子的蒸发,MXene纳米片层层堆叠会形成量子限域超流体通道。值得注意的是,在成膜过程中由于水分子的快速蒸发,MXene薄膜的上表面会出现一些纳米褶皱,而下表面由于玻璃片衬底的限制会呈现出比较平整的状态,从而形成了非对称的量子限域超流体通道。当施加湿度刺激时,由于水分子在量子限域超流体通道中的超快传输以及非对称的溶胀效应,MXene薄膜驱动器会朝着平整的一侧发生弯曲。去除湿度后,该驱动器便会恢复初始状态。此外,由于MXene优异的光热效应和电热效应,当施加光刺激或电刺激时,MXene薄膜会将光能或电能转化为热能。非对称的量子限域超流体通道会引起水分子的非对称脱附,进而导致MXene薄膜的非对称收缩,从而实现光驱动或电驱动。综上所述,该MXene薄膜驱动器可以实现湿度、光场、电场多场驱动。除此之外,该驱动器是基于MXene这一种材料体系,解决了传统多层结构中由于多种材料间层间结合力弱、粘附性差所带来的器件稳定性差的问题。
与现有技术相比本发明具有以下有益效果:本发明所提供的一种利用量子限域超流体效应的多重响应驱动器的制备方法及应用,利用可实现多重响应的MXene驱动器来制备多角色机器人、智能窗帘、仿生蜻蜓、双向开关。而且该驱动器还具有以下优点:①充分发挥MXene优异的亲水性、导电性、导热性,利用非常简单的材料体系及制备方法实现了MXene驱动器的湿度、光场、电场三种驱动方式,多种驱动方法之间可以相互协调,提高了MXene驱动器的灵活性,进一步可以促进该驱动器的实际应用;②利用MXene薄膜内部非对称的量子限域超流体通道对水分子吸附/脱附的差异性来实现湿度、光场、电场驱动,摆脱了传统双层结构的束缚,避免了由于不同种材料层间结合力弱所带来的问题,大大提高了器件的稳定性。
附图说明
图1为本发明的MXene薄膜制备流程图。
图2为本发明制备的MXene薄膜的多场驱动原理图。
图3为本发明利用MXene薄膜驱动器制备的多角色机器人。
图4为多角色机器人在湿度场驱动下的响应图。
图5为多角色机器人在光场驱动下的响应图。
图6为本发明利用MXene薄膜驱动器制备的智能窗帘在不同驱动条件下屏蔽电磁波的示意图。
图7为智能窗帘在不同驱动条件下的实物图。
图8为智能窗帘屏蔽和未屏蔽电磁波的数据图。
图9为本发明利用MXene薄膜驱动器制备的仿生蜻蜓机器人在电场驱动下的响应图。
图10为本发明利用MXene薄膜驱动器制备的双向开关应用的电路原理图。
图11为本发明利用MXene薄膜驱动器制备的双向开关在湿度场和光场驱动下的响应图。
具体实施方式
以下结合具体实施例对本发明作进一步说明。
实施例一
一种利用量子限域超流体效应的多重响应驱动器的制备方法,具体步骤如下:
(1)MXene溶液的制备;
①在聚四氟乙烯烧杯中加入25 mL盐酸,然后缓慢添加2 g氟化锂,加入完成后搅拌30 min;
②将2 g MAX-Ti
③将步骤②中获得的反应液体倒入离心管中,以12000 rpm的转速离心12 min,离心后将上清液倒掉,继续向离心管的沉淀中分别加入去离子水并混合均匀,然后将离心管放入大功率超声机中超声12 min,取出后继续离心,转速12000 rpm,时间12 min,重复几次,直到离心后倒出的液体pH值到6;
④将离心管中的残留上层液体倒出,真空烘箱烘干下层沉淀后,在离心管中加入乙醇30 mL并超声1 h,然后以12000 rpm的转速离心12 min,收集下层沉淀物;
⑤向步骤④中离心的沉淀产物中加入20 mL去离子水,摇匀,然后超声30 min后,以3500 rpm的转速离心3 min,收取黑棕色上层液为少层分散液;
⑥反复进行步骤⑤,收取更多的少层分散液;
⑦取分散液约10 mL 进行抽滤,干燥后称量重量,获得MXene分散液浓度值。
(2)MXene薄膜驱动器的制备;
具体步骤为:取MXene分散液滴涂到玻璃片衬底上,旁边放置鼓风机,采用鼓风的方式在室温下晾干;然后,从玻璃片上将MXene薄膜揭下来,MXene纳米片层层堆叠形成量子限域超流体通道,MXene薄膜驱动器制备完成。鼓风机的作用是加速薄膜上表面空气的流动,促进水分子的快速蒸发,从而诱导出更为明显的非对称的量子限域超流体通道。
采用上述方法所制备的一种利用量子限域超流体效应的多重响应驱动器的应用,制备完成后,首先将MXene薄膜切成条带;然后,分别施加不同的外界刺激,并测试在对应刺激下的响应性能,MXene薄膜驱动器的多场驱动响应具体如下:
①湿度场驱动:对该MXene薄膜驱动器施加湿度;由于MXene表面含有大量的含氧基团,因此在湿度条件下可以吸附水分子进而发生膨胀,而MXene薄膜上下两侧非对称量子限域超流体通道的存在影响了MXene薄膜两侧对水分子的吸附能力,导致MXene薄膜两侧膨胀程度不同,进而产生朝向平整一侧的弯曲形变;当去除湿度时,由于水分子的脱附,薄膜可逆的恢复到原来平直的形状;因此,MXene薄膜驱动器实现了湿度场驱动;
②光场驱动:MXene自身优异的光热转换特性使得MXene薄膜驱动器可以在光刺激下发生响应,当施加光场时,MXene薄膜将光能转换为热能使得温度升高,促进水分子的脱附;非对称量子限域超流体通道的存在也会影响MXene薄膜两侧水分子的脱附能力,从而使得薄膜在光驱动下朝着反向弯曲,也就是朝着褶皱多的一侧发生弯曲;当去除光场时,薄膜通过吸附环境中的水分子又可以恢复到初始状态;这样便实现了光场驱动;
③电场驱动:MXene还具有优异的导电性和电热转换能力。当施加电场时,MXene将电能转化为焦耳热从而使得MXene薄膜温度升高,促进水分子的脱附;非对称量子限域超流体通道的存在会造成水分子发生非对称的脱附,进而引起MXene薄膜非对称的收缩,最终使得MXene薄膜朝着褶皱多的一侧发生弯曲;同样地,当去除电场后,薄膜通过吸附环境中的水分子恢复到初始状态;因此,MXene薄膜驱动器实现了电场驱动。
实施例二
当MXene薄膜驱动器具体应用于制备多角色机器人、智能窗帘、仿生蜻蜓、双向开关时,具体如图3至图10所示。
如图3~图5所示,利用本实施例所制备的MXene薄膜驱动器来制造多角色机器人:图3为多角色机器人的驱动示意图;图4为湿度驱动时该多角色机器人为仿生花瓣;图5光驱动时该多角色机器人为爬行机器人,通过4次光驱动向左爬行约1cm。
如图6~图8所示,利用本实施例所制备的MXene薄膜驱动器来制造智能窗帘,当光驱动开启,湿度驱动关闭时,智能窗帘卷曲,电磁波顺利进入,无法实现屏蔽,测得的电磁波屏蔽强度为0dB;当光驱动关闭,湿度驱动开启时,智能窗帘变平,电磁波被成功屏蔽,测得的电磁波屏蔽强度最大为70dB。
如图9所示,利用本实施例所制备的MXene薄膜驱动器来制造仿生蜻蜓机器人;在电场驱动下,模拟蜻蜓振动翅膀。
如图10和图11所示,利用本实施例所制备的MXene薄膜驱动器来制造双向开关;湿度驱动时MXene薄膜驱动器朝右弯曲,接通右边小灯泡电路;光驱动时MXene薄膜驱动器朝左弯曲,接通左边小灯泡电路。
通过上述应用实施例可以说明,本发明所设计的利用量子限域超流体效应制备多重响应驱动器,制备方法简单,稳定性高,驱动方式灵活,可以实现多场响应和多领域应用,极大地促进了MXene驱动器的发展,也为基于其他材料的驱动器的制备提供了一种新的思路。
本发明要求保护的范围不限于以上具体实施方式,而且对于本领域技术人员而言,本发明可以有多种变形和更改,凡在本发明的构思与原则之内所作的任何修改、改进和等同替换都应包含在本发明的保护范围之内。