缝线穿引装置及其使用方法
文献发布时间:2023-06-19 09:36:59
技术领域
本公开总体上涉及外科器械,并且具体地涉及可以操纵缝线并使缝线通过组织的外科器械。
背景技术
关节镜手术通常涉及通过体内的小开口并在使用内窥镜观察下进行外科手术。通常通过直接在患者体内形成的一个或多个入口,或通过小切口插入患者体内的一个或多个插管,提供对靶组织的接近。外科手术通常由外科医生通过使用穿过这些插管插入的细长器械来进行。
关节镜手术的一个常见实例是髋关节囊闭合。髋关节囊是连接腿顶和骨盆的韧带。在髋关节镜检查中,囊闭合通常是手术的最后一步。然而,由于可能需要的步骤数以及需要多次插入髋关节囊和从髋关节囊中取出的多个器械(如缝线穿引器和取回器)的使用,囊闭合器对外科医生可能具有挑战性。缝线的取回例如通常通过用常规的钳子或在钳子的钳口闭合时在远侧尖端形成有缝线捕获孔口的其它抓持器来抓紧缝线来完成。一些缝线取回器包括简单的环,其从细长管的尖端延伸,并且可以在缝线穿过环时闭合。然而,这些装置通常操作相对复杂,使得普通外科医生更难以利用,并且增加了装置故障的可能性。另外,通过挤压柄部使针穿过远侧钳口的“枪”式缝线穿引器通常是大而笨重。这些类型的缝线穿引器中涉及的机制也使得它们难以以接近髋关节囊所需的正确远侧曲率制造。
发明内容
本文描述了缝线穿引装置,其将标准缝线穿引器的低轮廓和最佳角度几何形状与缝线抓持器的功能组合在一起。该装置具有弯曲的开槽轴,所述弯曲的开槽轴具有刺穿端和一体式缝线抓持器,允许外科医生用所述装置刺穿第一组织部分,并将装载在所述轴内的单丝的环形部分延伸到修复部位中。然后旋转轴,使得允许单丝通过槽从轴中掉出。然后,外科医生用装置刺穿第二组织部分,并延伸缝线抓持器以捕获单丝的环形部分。单丝通过第二组织部分取回,并且缝线穿过单丝的环形部分。最后,使用单丝拉动缝线穿过组织,并然后张紧缝线以闭合髋关节囊。
本公开的缝线穿引装置及其使用方法的其它实例可以包括任何合适组合的以下的一个或多个。
在实例中,本公开的组织修复方法包括将缝线穿引装置引入修复部位中。该装置包括中空轴,所述中空轴具有近端、远端和从近端到远端延伸穿过轴的表面的槽。具有环形部分的柔性构件装载在所述轴内。所述方法还包括将装置插入穿过第一组织部分中的第一刺穿点,使得所述轴的远端从所述第一刺穿点延伸,并且从所述轴的远端延伸所述柔性构件,使得所述柔性构件的环形部分从所述第一刺穿点延伸。所述方法还包括平移轴,使得允许柔性构件穿过轴的远端处的槽落入修复部位中。
所述方法的其它实例包括将装置插入穿过邻近于所述第一组织部分的第二组织部分中的第二刺穿点。抓持构件从所述装置延伸以抓持所述柔性构件的环形部分。然后,抓持构件朝向轴的远端缩回以将柔性构件固定到装置。然后,所述装置和所述柔性构件的环形部分通过所述第二组织部分缩回。在另外的实例中,所述方法包括使缝线穿过所述柔性构件的环形部分。然后,柔性构件的自由端用于拉动缝线穿过第一组织部分和第二组织部分。然后张紧缝线以闭合第一组织部分与第二组织部分之间的间隙。
在又一些实例中,从装置延伸抓持构件包括致动联接至轴的近端的柄部上的构件,致动构件可操作地联接至抓持构件。在实例中,该方法还包括绑结缝线的端部以将缝线固定到第一组织部分和第二组织部分。在实例中,柔性构件是单丝。在实例中,将装置插入穿过第一组织部分中的刺穿点包括利用轴的远端处的尖头尖端将装置插入穿过刺穿点。在实例中,将装置引入修复部位包括通过插管引入装置。在另外的实例中,插管是7.0mm或8.5mm关节镜插管中的一个,并且修复部位是髋关节囊。
本公开的缝线穿引装置的实例包括柄部,柄部具有近端、远端和沿纵向轴线在近端与远端之间延伸的第一槽。所述装置还包括中空轴,所述轴的近端在所述柄部的远端处联接到所述第一槽。所述轴包括第二槽,所述第二槽沿着所述轴的长度延伸以与所述轴的内部连通,并且构造成从所述轴的内部释放柔性构件。所述第一槽与所述第二槽轴向对准。所述装置还包括抓持构件,所述抓持构件设置在所述轴内并且构造成沿所述轴的长度在缩回位置与延伸位置之间移动。所述抓持构件包括当处于所述延伸位置时从所述轴的远端突出的至少一个臂。
在另外的实例中,所述装置包括在所述柄部的表面上的致动器,所述致动器可操作地联接到所述抓持构件,以使所述抓持构件在所述缩回位置与所述延伸位置之间移动。在实例中,轴的远端包括用于穿透组织的尖头尖端和斜切开口。在实例中,轴的远端相对于柄部的纵向轴线是弯曲的。在实例中,相对于纵向轴线的弯曲角度为约70度。在另外的实例中,抓持构件的至少一个臂是两个臂,并且两个臂中的至少一个终止于钩状部分。在实例中,至少两个臂的长度基本上相同。在又一些实例中,当处于延伸位置时,至少两个臂受到偏压而弹开。在另外的实例中,所述装置构造成穿过7.0mm或8.5mm关节镜插管中的至少一个。
通过阅读以下详细描述并查看相关附图,这些和其它特征和优点将是显而易见的。应当理解,前面的一般描述和下面的详细描述都只是说明性的,并不是对要求保护的方面的限制。
附图说明
通过结合以下附图参考详细描述将更全面地理解本公开,其中:
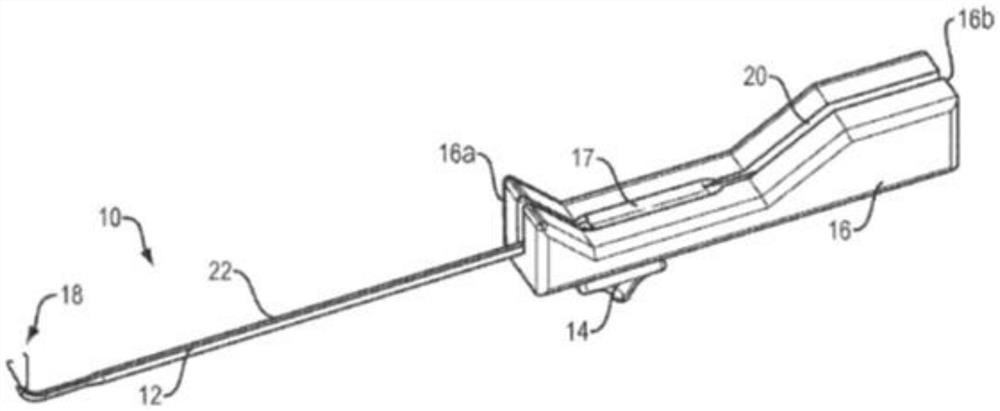
图1是在侧视图中的本公开的缝线穿引装置的实例;
图2A和2B是图1的缝线穿引装置的透视图;
图3A和3B是图1的缝线穿引装置的远端的详细视图;以及
图4A-E示出了髋关节囊封闭中使用图1的缝线穿引装置的方法的实例。
具体实施方式
在下面的描述中,相似的部件已被赋予相同的附图标记,而不管它们是否在不同的实例中示出。为了以清楚和简明的方式示出示例,附图可能不一定按比例绘制,并且某些特征可以以略微示意的形式示出。关于一个示例描述和/或示出的特征可以在一个或多个其它实例中以相同方式或以类似方式使用和/或与其它示例的特征组合或代替其它实例的特征。
如说明书和权利要求书中所使用的,出于描述和定义本发明的目的,术语“约”和“大致”用于表示可以归因于任何定量比较、值、测量或其它表示的固有不确定度。术语“约”和“大致”也在本文中用于表示定量表示可以与所述基准不同而不会导致所讨论主题的基本功能发生变化的程度。“包括”、“包含”和/或各自的多个形式是开放式的并且包括列出的部分并且可以包括未列出的附加部分。“和/或”是开放式的并且包括一个或多个列出的部分和列出的部分的组合。
现在转到图1,在侧视图中示出了用于操纵和穿引缝线的缝线穿引装置10。装置10大体上包括具有远端12a的细长中空轴12,以及在轴12的近端12b处的柄部16。致动器14(例如,杆、滑动件或按钮)可以联接到柄部16的表面。致动器14构造成例如通过沿着柄部16的表面的轴向移动来控制轴12的远端12a处的抓持构件18。装置10可用于例如在髋关节镜手术中的囊闭合期间使缝线穿过组织和/或通过组织取回缝线。然而,本公开预期装置10可用于其它类型的关节镜手术,例如唇修复或肩袖修复。在实例中,装置10有利地具有低轮廓,其构造成配合穿过7.0mm或8.5mm关节镜插管。
如图2A和2B所示,柄部16包括第一纵向槽20,第一纵向槽从柄部16的远端16a延伸到近端16b。轴12的近端12b延伸到柄部16的远端16a处的槽20中。如图2A和2B所述,槽20包含具有较宽直径的区域,所述区域限定与致动器14连通的致动器槽17。轴12进一步包括与第一槽20轴向对准的第二纵向槽22。第二槽22沿着轴12的长度延伸,以与轴12的内部连通。在实例中,装置10的各种部件,包括轴12和柄部16,可由各种医疗级材料中的一种或多种形成,包括不锈钢、钛、聚碳酸酯、丙烯腈-丁二烯-苯乙烯(ABS)、聚丙烯、丙烯酸、液晶聚合物(LCP)、聚醚醚酮(PEEK)、硅酮和热塑性弹性体(TPE)。可以使用各种不同的制造技术来制造和组装装置10的各种部件。在实例中,装置10的各种部件经由压配合、包覆模制、焊接或其它连结工艺组装。
现在在图3A和3B中示出了轴12的远端12a的详细视图。在图3A和3B中,轴12的远端12a示出为具有尖头尖端或组织穿透远侧尖端24。远侧尖端24可以例如由斜切开口26限定。然而,本公开设想了其它尖端几何形状。在实例中,轴12的远端12a可以以锐角变弯或弯曲,以提供用于接近修复部位(如髋关节囊)的最佳角度几何形状。在实例中,弯曲部相对于轴12的长轴线A的角度为约70度。然而,本公开可设想大于或小于70度的角度。本公开还设想另外的弯曲构造,如左/右螺旋弯曲、新月形或其它合适的几何形状。
仍然参考图3A和3B,抓持构件18包括当处于延伸位置时从轴12的远端12a突出的一对可缩回的可变形线状臂28、30。虽然在图3A和3B将抓持构件18示为包括两个臂28、30,应认识到,可使用多于或少于两个臂。两个臂28、30可以由不锈钢线、镍钛诺或其它合适的材料形成。臂28、30可由相同材料或具有不同拉伸强度和/或柔性度的不同材料制成。在延伸位置,臂28、30受到偏压而弹开,但当它们缩回到轴12中时,它们被强制在一起。
由于臂28、30的闭合在臂28、30缩回到轴12中时需要反作用力,因此反作用力可以由轴12内的任何数目个内部几何形状提供。内部几何形状的实例可以包括横向桥接件(未示出),臂28、30在横向桥接件下方穿过,使得当臂28、30缩回时,桥接件抵靠轴12的内径保持臂28、30。在其它实例中,臂28、30可以缩回在相邻的完全周向的内腔(未示出)的内部,该内腔确保在缩回时臂28、30的闭合。因此,臂28、30的轴向运动产生臂28、30的打开/闭合运动,这可用于缝线抓持和操纵。
仍然参考图3A和3B,臂28、30中的一个的长度可以较之于另一臂28、30的长度相同、更长或更短,但优选地,两个臂28、30的长度相同以防止缝线仅由一个臂28、30捕获。在实例中,臂24、26中的至少一个(在存在时优选更强的/更刚性的臂)终止于全钩(fullhook)34以帮助抓持缝线。如图所示,臂28、30中的另一个可终止于部分钩36。在实例中,部分钩36可以充当臂以用全钩34将缝线推向臂,并且在钩34、36的闭合期间捕获缝线。然而,本公开预期臂28、30中的另一个可终止于另一个全钩中或可为直边的。如图3A和3B所示,当臂28、30处于延伸位置时,它们基本上线性对准于尖端24和槽22之间,使得钩34、36朝向彼此弯曲。本公开进一步设想了以圆锥形或其它合适的几何方式延伸的多钩构造有助于缝线捕获。
在实例中,臂28、30中的每一个终止于链接构件32。链接构件32可以是弯曲的,以适应轴12的远端12a处的曲率。链接构件32直接或间接地操作联接到致动器14(图1),以将臂28、30在延伸位置与缩回位置之间移动,或移动到其间的选定位置。在实例中,抓持构件18经由拉伸和弯曲,或者通过金属冲压工艺作为一个部件来制造(例如,在臂28、30和链接构件32由单块金属冲压而成的情况下),这可以减少臂28、30从抓持构件18折断并从而掉入患者手术腔中的可能性。然而,可备选地或另外地使用其它制造技术,如压铸和注塑成型。
图4A-E示出了使用装置10来闭合两片组织(例如,髋关节囊的第一组织部分40和第二组织部分42)之间的间隙的方法的实例。为了开始程序,首先将装置10载有单丝或其它柔性构件44的环形部分44a。如图4A所示,装置10穿过入口46进入修复部位,并然后在第一刺穿点48处穿过第一组织部分40。单丝44接着例如通过使用者的拇指沿着柄部16中的致动器槽17的轴向移动而从轴12的远端12a穿梭,使得柔性构件44的环形部分44a从第一刺穿点48延伸。如图4B,在不从入口46移除装置10的情况下,装置10从第一组织部分40缩回,并然后旋转或以其它方式平移以通过槽22从装置10释放柔性构件44。因此,柔性构件44的环形部分44a保持在修复部位中,而柔性构件44的第二端44b在入口46外部且用户可接近。
现在转到图4C,装置10在第二刺穿点50处刺穿第二组织部分42。抓持构件18从轴12的远端12a延伸,并且由抓持构件18通过第二组织部分42的第二刺穿点50取回柔性构件44。如图4D所示,装置10接着从入口46取出,同时通过入口46取回柔性构件44的环形部分44a。然后使一股缝线52穿过柔性构件44的环形部分44a。然后拉动柔性构件44的第二端44b以将缝线52穿引到入口46中并且穿过组织部分40、42,以闭合组织部分40、42之间的空间(图4E)。然后,外科医生可以在缝线52中打结以闭合髋关节囊的此部分。
尽管已参考其优选示例具体示出和描述了本公开,但是本领域技术人员将理解,在不脱离由所附权利要求限定的本申请的精神和范围的情况下,可以在形式和细节上进行各种改变。这样的改变旨在由本申请的范围涵盖。因而,本申请的示例的前述描述并非旨在限制,而是由所附权利要求书表达完整范围。
- 缝线穿引装置及其使用方法
- 多缝线穿引装置