一种偏振同步移相干涉测量装置和方法
文献发布时间:2023-06-19 09:52:39
技术领域
本发明涉及光学精密测试的技术领域,尤其涉及一种偏振同步移相干涉测量装置,以及这种偏振同步移相干涉测量装置所采用的方法。
背景技术
在光学表面制造过程中,光学表面面形误差的准确测量对于指导其迭代制造过程具有重要意义。干涉法是一种纳米级高精度的面形测量方法,常用于精磨和终检阶段。制造过程中的在位检测要求检测方法具有较强的抗振能力以及灵活性,既可适应车间的振动环境,又能对不同阶段被测面面形进行灵活测量。
在抗振测量方面,近年来,偏振相机常被应用到干涉测量中,通过空间相移即时获得测量相位。这种相移干涉法不用机械或电气设备进行时间相移,而是用偏振相机进行空间同步移相,以抑制振动、空气扰动、温度漂移等环境因素对干涉测量的影响,可以满足光学元件在位测量在抗振方面的要求。
在面形适应性方面,以Dall透镜,Ross透镜,Offner透镜,计算机生成的全息图等为代表的静态补偿器可以为精密光学表面测量提供高准确度和高精度。然而,传统的静态补偿器由于其一对一的特性,无法胜任各个制造阶段中非球面的在位检测,需要采用更加灵活的测量方法。倾斜波干涉仪将在一定程度上增加检测灵活性。但是,其内部组件微透镜阵列的横向分辨率和复杂的回程误差校正过程限制了其测量精度。相位偏折法具有出色的测量灵活性,近年来已被应用于非球面的检测,但其复杂的校准过程限制了其测量精度,使其在非球面在位检测中仍存在挑战。
可变形反射镜和空间光调制器具备灵活的像差校正特性,可以被用作柔性补偿器,与干涉检测法结合,在保证干涉测量高精度优势的同时,提高检测的灵活性,解决复杂光学曲面的在位检测问题。相比于可变形反射镜,空间光调制器更易于控制且具有更多的控制通道,因此,在干涉测量中使用空间光调制器作为柔性补偿器,可以期望实现更灵活的像差补偿、获得更高的测量精度。然而,由于交变控制电路的不稳定性与制造工艺的不完善,空间光调制器通常会在应用中出现相位闪烁以及存在调制的非均匀性,影响测试准确性。因此,非球面在位测量中灵活性和准确性之间的平衡仍然是一个重要的问题。
发明内容
为克服现有技术的缺陷,本发明要解决的技术问题是提供了一种偏振同步移相干涉测量装置,其解决了非球面在位测量中灵活性和准确性之间的平衡性问题,在保证面形测量精度的同时提高测量的灵活性。
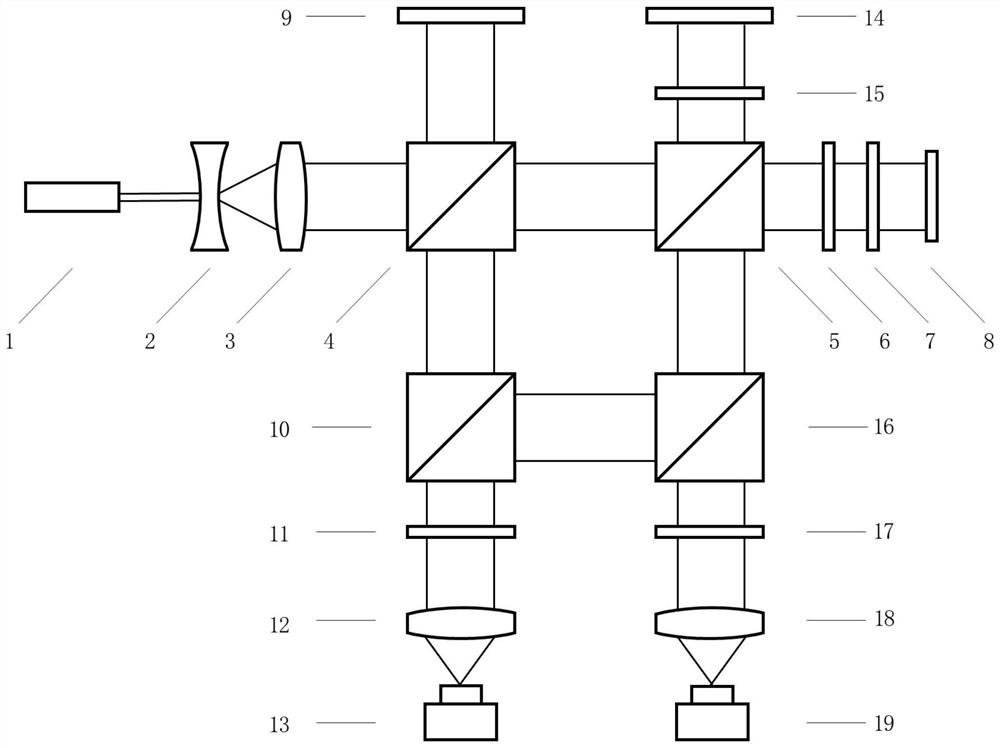
本发明的技术方案是:这种偏振同步移相干涉测量装置,其包括:激光器(1)、扩束镜(2)、准直镜(3)、第一分光棱镜(4)、第一偏振分光棱镜(5)、第一四分之一波片(6)、线偏振器(7)、空间光调制器(8)、参考镜(9)、第二偏振分光棱镜(10)、第二四分之一波片(11)、第一成像透镜(12)、第一偏振CCD相机(13)、被测镜(14)、第三四分之一波片(15)、第二分光棱镜(16)、第四四分之一波片(17)、第二成像透镜(18)、第二偏振CCD相机(19);
系统光路包括干涉测量光路和偏振补偿光路;
干涉测量光路用于对空间光调制器的面形进行实时监测,光路如下:
激光器出射的激光经过扩束镜和准直镜后,被第一分光棱镜分成两路,其中反射光入射到参考镜,经其反射后通过第一分光棱镜、第二偏振分光棱镜、第二四分之一波片、第一成像透镜进入第一偏振CCD相机,作为参考光;透射光束到达第一偏振分光棱镜,光束的P偏振分量透射,经过第一四分之一波片、线偏振器到达空间光调制器,而后被其反射,并通过上述元件回到第一偏振分光棱镜位置;
光束的S偏振分量依次被第一偏振分光棱镜、第二分光棱镜、第二偏振分光棱镜反射后,经过第二四分之一波片、第一成像透镜进入第一偏振CCD相机,作为测量光,并与参考光发生干涉;
偏振补偿光路用于对被测镜进行近零补偿,光路如下:
激光器出射的激光经过扩束镜和准直镜后,被第一分光棱镜分成两路,其中的透射光入射到第一偏振分光棱镜;光束的S偏振分量被反射,经过第三四分之一波片到达被测镜,被反射后再次经过第三四分之一波片,并依次通过第一偏振分光棱镜、第二分光棱镜、第四四分之一波片和第二成像透镜,进入到第二偏振CCD相机,作为测量光;光束的P偏振分量透射,经过第一四分之一波片、线偏振器到达空间光调制器,而后被其反射,并通过上述元件回到第一偏振分光棱镜位置;反射光中的S分量依次被第一偏振分光棱镜反射、第二分光棱镜透射,而后通过第四四分之波片、第二成像透镜进入到第二偏振CCD相机,作为参考光,并与测量光发生干涉。
本发明将空间光调制器和干涉测量法相结合,以空间光调制器作为柔性参考镜,用于待测非球面像差的补偿,在保留干涉测量高精度优势的同时,提高了在位测量的灵活性;利用同一干涉仪实现非球面的面形检测的同时对空间光调制器的面形进行了实时监测,避免了空间光调制器部分稳定性和调制不均匀性对测量结果产生影响,进一步保证了在位测量的准确性;利用偏振同步移相系统实现空间同步移相,提高在位测量方法的抗振能力;因此解决了非球面在位测量中灵活性和准确性之间的平衡性问题,在保证面形测量精度的同时提高测量的灵活性。
还提供了一种偏振同步移相干涉测量方法,其包括以下步骤:
(1)从干涉图结算相位信息;
(2)系统误差的标定;
(3)求解被测面引入的相位;
(4)计算被测面面形。
附图说明
图1为本发明具体实施方式所述装置的组成结构图;
图2为本发明所述方法的流程图;
图3为本发明实例中从干涉测量光路中获取的相位分布图;
图4为本发明实例中从偏振补偿光路中获取的相位分布图;
图5为本发明实例中干涉测量光路中其他光学元件制造和定位误差引入的相位分布图;
图6为本发明实例中偏振补偿光路中其他光学元件制造和定位误差引入的相位分布图;
图7为本发明实例中被测镜面形引入的相位误差分布图;
图8为本发明实例中被测镜面形误差分布图;
图9为本发明实例中的被测镜,通过ZYGO干涉仪测得的面形误差分布图。
图1中,1-激光器、2-扩束镜、3-准直镜、4-第一分光棱镜、5-第一偏振分光棱镜、6-第一四分之一波片、7-线偏振器、8-空间光调制器、9-参考镜、10-第二偏振分光棱镜、11-第二四分之一波片、12-第一成像透镜、13-第一偏振CCD相机、14-被测镜、15-第三四分之一波片、16-第二分光棱镜、17-第四四分之一波片、18-第二成像透镜、19-第二偏振CCD相机。
具体实施方式
为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“包括”以及任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、装置、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其他步骤或单元。
如图1所示,这种偏振同步移相干涉测量装置,其包括:激光器1、扩束镜2、准直镜3、第一分光棱镜4、第一偏振分光棱镜5、第一四分之一波片6、线偏振器7、空间光调制器8、参考镜9、第二偏振分光棱镜10、第二四分之一波片11、第一成像透镜12、第一偏振CCD相机13、被测镜14、第三四分之一波片15、第二分光棱镜16、第四四分之一波片17、第二成像透镜18、第二偏振CCD相机19;
系统光路包括干涉测量光路和偏振补偿光路;
干涉测量光路用于对空间光调制器的面形进行实时监测,光路如下:
激光器出射的激光经过扩束镜和准直镜后,被第一分光棱镜分成两路,其中反射光入射到参考镜,经其反射后通过第一分光棱镜、第二偏振分光棱镜、第二四分之一波片、第一成像透镜进入第一偏振CCD相机,作为参考光;透射光束到达第一偏振分光棱镜,光束的P偏振分量透射,经过第一四分之一波片、线偏振器到达空间光调制器,而后被其反射,并通过上述元件回到第一偏振分光棱镜位置;
光束的S偏振分量依次被第一偏振分光棱镜、第二分光棱镜、第二偏振分光棱镜反射后,经过第二四分之一波片、第一成像透镜进入第一偏振CCD相机,作为测量光,并与参考光发生干涉;
偏振补偿光路用于对被测镜进行近零补偿,光路如下:
激光器出射的激光经过扩束镜和准直镜后,被第一分光棱镜分成两路,其中的透射光入射到第一偏振分光棱镜;光束的S偏振分量被反射,经过第三四分之一波片到达被测镜,被反射后再次经过第三四分之一波片,并依次通过第一偏振分光棱镜、第二分光棱镜、第四四分之一波片和第二成像透镜,进入到第二偏振CCD相机,作为测量光;光束的P偏振分量透射,经过第一四分之一波片、线偏振器到达空间光调制器,而后被其反射,并通过上述元件回到第一偏振分光棱镜位置;反射光中的S分量依次被第一偏振分光棱镜反射、第二分光棱镜透射,而后通过第四四分之波片、第二成像透镜进入到第二偏振CCD相机,作为参考光,并与测量光发生干涉。
本发明将空间光调制器和干涉测量法相结合,以空间光调制器作为柔性参考镜,用于待测非球面像差的补偿,在保留干涉测量高精度优势的同时,提高了在位测量的灵活性;利用同一干涉仪实现非球面的面形检测的同时对空间光调制器的面形进行了实时监测,避免了空间光调制器部分稳定性和调制不均匀性对测量结果产生影响,进一步保证了在位测量的准确性;利用偏振同步移相系统实现空间同步移相,提高在位测量方法的抗振能力;因此解决了非球面在位测量中灵活性和准确性之间的平衡性问题,在保证面形测量精度的同时提高测量的灵活性。
优选地,所述线偏振器的方向偏振方向平行于空间光调制器的液晶光轴方向。
优选地,所述空间光调制器工作在纯相位调制模式。
优选地,所述第一、第二、第三、第四四分之一波片的快轴方向与P偏振方向夹角为45°。
优选地,所述被测面为一块面形误差未知的Φ8mm的亚克力平面镜;测量过程中,采用4英寸DynaPhase干涉仪出射的632.8nm的圆偏光作为实验系统光源,约束光束口径为25.4mm;采用反射式空间光调制器,其像素数为1920×1080,通光孔径为15.36mm×8.64mm,像素间距为8μm。
如图2所示,一种偏振同步移相干涉测量方法,其包括以下步骤:
(1)从干涉图结算相位信息;
(2)系统误差的标定;
(3)求解被测面引入的相位;
(4)计算被测面面形。
优选地,所述步骤(1)中,从第一偏振CCD相机上的干涉图中结算出的相位信息表示为:
其中,
从第二偏振CCD相机上的干涉图中结算出的相位信息表示为:
其中,
优选地,所述步骤(2)中,采用标准平面反射镜对待测镜和空间光调制器进行替代,求解其他光学元件制造和定位误差引入的相位
优选地,所述步骤(3)中,根据步骤(1)中结算的相位的表达式,被测面引入的相位表达为:
将步骤(2)中标定的
优选地,所述步骤(4)中,根据公式(4)计算被测面面形
其中,e
本发明方法及装置,对比现有技术,具有以下优势和特点:
(1)本发明所述方法将空间光调制器和干涉测量法相结合,以空间光调制器作为柔性参考镜,用于待测非球面像差的补偿,在保留干涉测量高精度优势的同时,提高了在位测量的灵活性。
(2)本发明所述方法利用同一干涉仪实现非球面的面形检测的同时对空间光调制器的面形进行了实时监测,避免了空间光调制器部分稳定性和调制不均匀性对测量结果产生影响,进一步保证了在位测量的准确性。
(3)本发明所述装置采用偏振相机作为探测器件,并基于该器件组建了偏振同步移相系统,实现空间同步移相,提高在位测量方法的抗振能力。
以下详细说明本发明的具体实施例。
本实施例所述被测面为一块面形误差未知的Φ8mm的亚克力平面镜。测量过程中,采用4英寸DynaPhase干涉仪出射的632.8nm的圆偏光作为实验系统光源,约束光束口径为25.4mm。采用反射式空间光调制器,其像素数为1920×1080,通光孔径为15.36mm×8.64mm,像素间距为8μm。
通过本发明所述方法进行面形误差检测。
首先根据步骤(1),首先从偏振CCD相机获取的干涉图计算相位。附图3和附图4分别为从干涉测量光路和偏振补偿光路中的干涉图计算得到的相位分布图。
之后执行步骤(2),用标准平面反射镜替代光路中的被测镜和空间光调制器,对系统误差进行标定。附图5和附图6分别为干涉测量光路和偏振补偿光路中的标定结果。
再之后执行步骤(3),根据标定好的系统误差,计算被测面的引入的相位。附图7为被测面的相位
最后执行步骤(4),根据相位计算被测面的面形。由于被测面为平面反射镜,其标称面形e
此外,对于实施例中的被测面,采用所述的4英寸DynaPhase干涉仪对其直接进行测量,作为结果的参考。附图9为干涉仪测得的面形误差分布图,面形误差的PV为2.941λ,RMS为0.710λ。该结果和根据本发明所述方法测量的结果比较接近,以此证明方法的有效性。
以上所述,仅是本发明的较佳实施例,并非对本发明作任何形式上的限制,凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属本发明技术方案的保护范围。
- 一种偏振同步移相干涉测量装置和方法
- 光学干涉测量中分光、成像及同步移相的方法和装置