一种固体氢反应物自动回收系统
文献发布时间:2023-06-19 09:55:50
技术领域
本发明涉及氢气装置回收系统的技术领域,具体为一种固体氢反应物自动回收系统。
背景技术
作为储存氢的方式之一,存在一种包藏合金方式。作为包藏合金方式,由于其不需要在超高压、极低温这样的特殊状态下储存氢,因此不仅具有操作容易且安全性较高的优异特征,而且还具有每单位体积的氢储存量较高的优异特征。在40239中国公告公報2013800326813号中,公开一种采用包藏合金方式的氢产生装置。40239中国公告公報2013800326813号涉及的氢产生装置具有收容以氢化镁为主要成分的镁基氢化物粉末以及酸性物粉末的混合粉末的圆筒状的储存室、储水的储水室与燃料电池。向储存室插入有从储水室导出的注水管,从而从储水室向储存室供给水。当向储存室供水时,镁基氢化物粉末按照化学式(1)所记载那样进行水解,而产生氢。向燃料电池供给所产生的氢,从而用于发电。
[化学式1]
MgH2+2H2O→Mg(OH)2+2H2……(1)
[化学式2]
MgH2+H2O→MgO+2H2……(2)
然而,在40239中国公告公報2013800326813号涉及的氢产生装置中存在以下问题:
反应后生成的氢氧化镁回收存在一定的技术难度。
氢氧化镁难溶于水,属于较弱的碱,但对眼睛,呼吸系统和皮肤均略有刺激性,在不通过设备的情况下会对处理的人有一定的危险性
本技术主要是针对于氢化镁回收进行一系列的自动化操作,让人员可以通过设备进行反应物的回收与应用。
发明内容
本发明基于固体氢技术,提出一种固体氢反应物自动回收系统,解决了氢氧化镁无法回收的问题。
为实现上述目的,本发明提供如下技术方案:一种固体氢反应物自动回收系统,包括:
机器人,所述的机器人可将舱体拆分成反应舱和反应芯子;
超声波加热清洗震荡池,所述的超声波加热清洗震荡池对反应舱和反应芯子机清洗,并且将氢氧化镁脱离;
沉淀池,所述的沉淀池接受超声波加热清洗震荡池的氢氧化镁混合溶液,并且在55℃的温度下沉淀分离氢氧化镁;
其中:
所述的超声波加热清洗震荡池连接有重量检测仪。
进一步的,所述的回收系统还包括夹具平台,舱体放置在夹具平台的夹具内,夹具上设置有光电传感器,并且检测到舱体后自动夹紧。
进一步的,所述的回收系统还包括反应容器回收平台。
进一步的,所述的沉淀池设置有三个,三个所述的沉淀池依次连通。
与现有技术相比,本发明的有益效果如下:
人工回收固体氢反应物时相对比较危险,且化学品对人体有一定的刺激性,通过本专利可利用自动化设备来回收固体氢,即达到安全的前提又可以通过机器实现大批量的回收。极大的提高了回收的效率,在固体氢得到大规模的应用的基础上会是一个很好的回收系统,经过大量实验获得,氢氧化镁混合液在55℃下分离效果更好。
附图说明
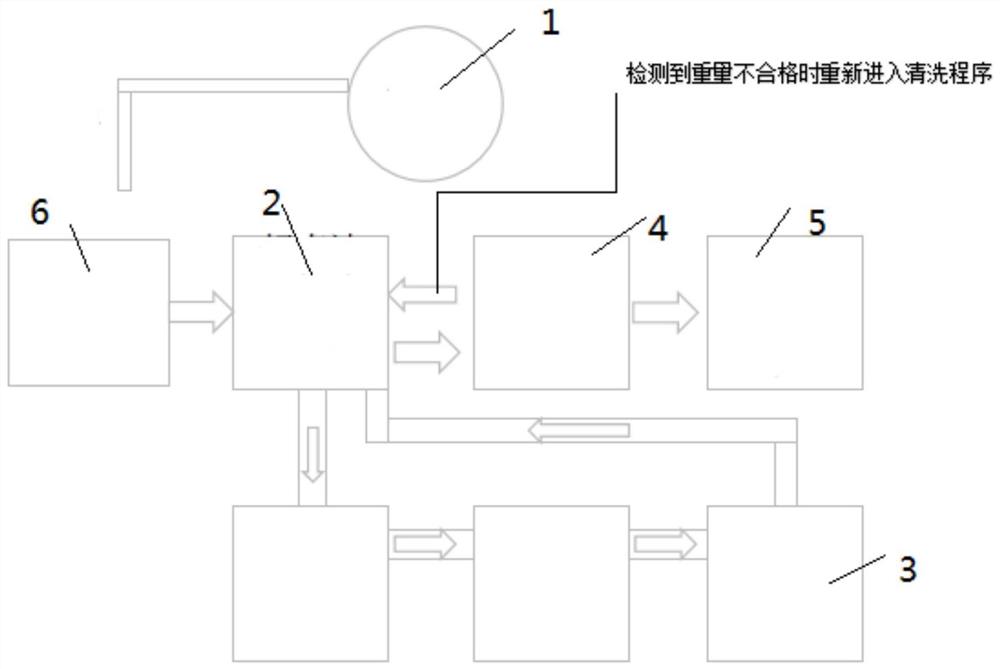
图1为本发明示意图。
图中:机器人-1、超声波加热清洗震荡池-2、沉淀池-3、重量检测仪-4、夹具平台-5、反应容器回收平台-6。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明的简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
请参阅附图,本发明提供的一种实施例:一种固体氢反应物自动回收系统,包括:
机器人1,所述的机器人1可将舱体拆分成反应舱和反应芯子;
超声波加热清洗震荡池2,所述的超声波加热清洗震荡池2对反应舱和反应芯子机清洗,并且将氢氧化镁脱离;
沉淀池3,所述的沉淀池3接受超声波加热清洗震荡池2的氢氧化镁混合溶液,并且在55℃的温度下沉淀分离氢氧化镁。
相同频率不同温度超声波下氢氧化镁在容器上的残留量。
其中:
所述的超声波加热清洗震荡池2连接有重量检测仪4。
具体的,所述的回收系统还包括夹具平台5,舱体放置在夹具平台5的夹具内,夹具上设置有光电传感器,并且检测到舱体后自动夹紧。
具体的,所述的回收系统还包括反应容器回收平台6。
具体的,所述的沉淀池3设置有三个,三个所述的沉淀池依次连通。
工作原理:
机器人根据预设的程序,对设置的夹具上的舱体进行分离,并将分离的反应舱和反应芯子放置入超声波加热清洗震荡池2,实现剥离氢氧化镁的目的,氢氧化镁的混合液进入到沉淀池3实现沉淀,设置的重量检测仪4对清洗后的反应舱和反应芯子的重量,通过校准重量判断反应舱和反应芯子是否清洗干净,对未能清洗干净的反应舱和反应芯子再次进行清洗。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
- 一种固体氢反应物自动回收系统
- 一种回旋加速器放射性固体靶的靶片全自动回收系统