一种用于仓储物流四向穿梭式搬运机器人
文献发布时间:2023-06-19 09:57:26
技术领域
本发明涉及一种仓储搬运机器人,尤其是一种用于仓储物流四向穿梭式搬运机器人,属于仓储物流智能装备技术领域。
背景技术
随着土地成本和人工成本的上涨,密集仓储这一概念越来越受到物流公司和电商公司的关注。自动化立体仓库由于具有很高的空间利用率、很强的出入库能力,已成为企业物流和生产管理不可缺少的仓储技术,在汽车、化工、电子、烟草等行业的应用逐年增长。未来几年,自动化立体仓储系统的技术发展趋势之一表现为高速度、高效率、高密度。
为适应密集存储托盘货物,提高单位空间的存储货物的数量,就需要一款四向穿梭式搬运机器人来完成托盘货物的转运。市场上的四向穿梭式搬运机器人存在很多局限:机器人高度超过180mm,机器人尺寸大于托盘,不利于有效利用存储空间;有的机器人的顶升机构采用液压结构,但是液压顶升缸数量均为八套,且存在漏油污染货物的问题;有的采用凸轮结构顶升,但是凸轮结构磨损较快,电机功率大不利于节约能源;有的采用八套螺杆升降机实现双向升降,成本较高;有的机器人不能实现双向跨域消防门,在实际案例中存在局限性;市场上已有的四向穿梭式机器人由于结构复杂空间小,不能进行防爆改造,就不能用于在防爆环境下使用。
发明内容
本发明针对上述提出的技术问题,提出一种用于仓储物流四向穿梭式搬运机器人,通过对结构的优化设计和合理的配置,减少了装备的重量和体积,大大提高机器人的适应性。
本发明解决以上技术问题的技术方案是:提供一种用于仓储物流四向穿梭式搬运机器人,包括机架以及设置在所述机架内的螺杆升降机构、行走驱动机构和电源控制单元,所述螺杆升降机构和行走驱动机构由所述电源控制单元控制运转,所述机架的四周安装主通道轮组件和副通道轮组件;
所述主通道轮组件包括主通道轮、主通道传动轴以及第一链轮副,所述主通道轮对称设置在所述机架在主通道运行方向的两侧,所述主通道传动轴两端驱动一对主通道轮,所述主通道传动轴上通过第一链轮副与所述行走驱动机构驱动相连,且所述主通道轮以及主通道传动轴由所述螺杆升降机构带动升降;
所述螺杆升降机构由两组分别安装在所述机架内的螺杆升降单元构成,每组螺杆升降单元控制一侧的所述主通道轮升降;所述螺杆升降单元上部设有升降螺杆连接板,所述升降螺杆连接板上安装托起货物的顶升板;
所述副通道轮组件包括副通道轮、副通道传动轴以及第二链轮副,所述副通道轮对称设置在所述机架在副通道运行方向的两侧,所述副通道传动轴两端驱动一对副通道轮,所述副通道传动轴上通过第二链轮副与所述行走驱动机构驱动相连。
本发明的进一步限定技术方案,前述的用于仓储物流四向穿梭式搬运机器人,所述主通道轮中包括一对主动主通道轮和一对从动主通道轮,所述主动主通道轮通过第三链轮副与所述主通道传动轴相连。所述主通道传动轴两端穿出所述机架侧壁上的腰形孔,所述主通道传动轴的端部与所述主动主通道轮的其中一个主道轮相连,相邻主道轮之间通过所述第三链轮副相连;在所述主通道传动轴的中部设有传动轴升降导向架。
前述的用于仓储物流四向穿梭式搬运机器人,所述副通道轮中包括一对主动副通道轮和一对从动副通道轮,所述主动副通道轮通过第四链轮副与所述副通道传动轴相连;所述第四链轮副包括主动副通道轮的两个副道轮之间的传动链轮副以及副通道传动轴与其中一个副道轮之间的驱动链轮副。
前述的用于仓储物流四向穿梭式搬运机器人,所述两个副道轮之间的传动链轮副设置在所述机架的外侧,这样在行走轮出现故障或需要检修时,直接卸下链条,在外侧即可卸下道轮,给检修工作带来便利。
前述的用于仓储物流四向穿梭式搬运机器人,所述螺杆升降单元包括升降传动机、升降传动轴以及螺杆升降机,安装在所述机架同侧的两个螺杆升降机通过所述升降传动轴相连,所述升降传动轴由所述升降传动机通过链轮副连接驱动;所述螺杆升降机顶部驱动所述顶升板,所述螺杆升降机同步驱动所述主通道轮组件升降,通过螺杆升降单元实现螺杆升降机构的同步升降,货物提升和主通道轮组件的升降能够稳定实现。
前述的用于仓储物流四向穿梭式搬运机器人,所述行走驱动机构包括行走电机和双出轴减速机,所述双出轴减速机的两组输出轴分别通过第一链轮副和第二链轮副与所述主通道传动轴和副通道传动轴相连;由所述行走电机带动双出轴减速机的两组输出轴输出动力带动四向上的通道轮。
前述的用于仓储物流四向穿梭式搬运机器人,所述主通道传动轴的侧边安装三挡位置高度传感器与所述电源控制单元相连,用以实现主通道轮组件和螺杆升降单元上移或下降位置的定位。
进一步的,前述的用于仓储物流四向穿梭式搬运机器人,所述主通道轮组件和副通道轮组件的外侧设有行走轮防护罩;所述机架的四角处设有导向轮,用以保护小车和行走通道,避免与小车行走通道发生过度摩擦或碰撞。
本发明的有益效果是: 本发明采用四套全新设计螺杆升降机构实现车辆主通道轮组件的双向顶升和对货物的举升,节约了搬运机器人的整体空间,降低设备的造价。本申请方案采用了链轮链条和螺杆的全机械传动结构设计,解决了液压升降漏油的问题,使该搬运机器人能够适应更多的应用场景;全车采用双向8行走轮设计,车体具有双向过消防门功能,多轮结构的车体能够有效分散承载,运行更加平稳。此外本申请方案的机器人长度与托盘长度保持一致,可实现完全堆叠,提高仓储区单位空间的机器人存储量。
附图说明
以下结合附图给出的实施例对本发明作进一步详细的说明。
图1 是本发明的结构示意图;
图2 是图1的A-A的剖视图;
图3 是图1的B-B的剖视图;
图4 是图1的C-C的剖视图;
图5 是本发明轴侧图;
图6 是本发明螺杆升降机构结构示意图;
图7 至图14本实施例中车体运行状态示意图。
具体实施方式
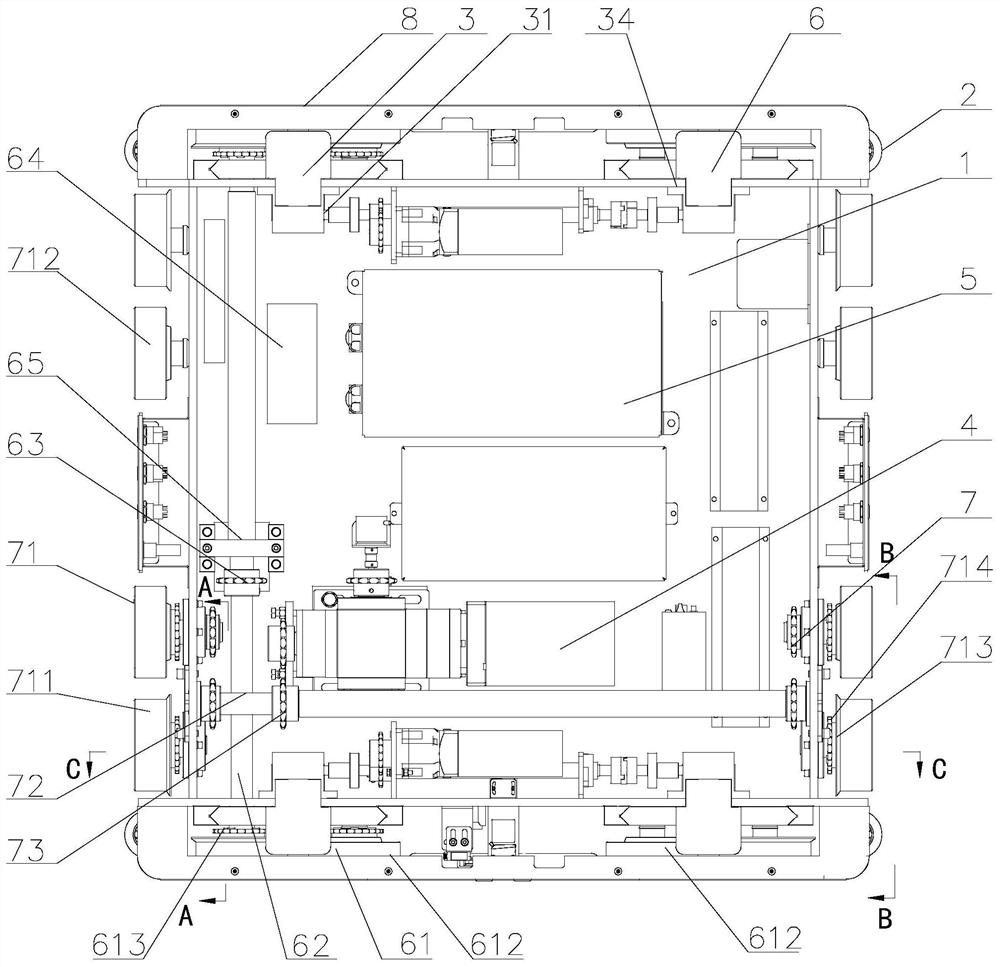
本实施例提供一种用于仓储物流四向穿梭式搬运机器人,结构如图1至6所示,包括机架1以及设置在机架内的螺杆升降机构3、行走驱动机构4和电源控制单元5,螺杆升降机构3和行走驱动机构4由电源控制单元5控制运转,机架的四周安装主通道轮组件6和副通道轮组件7,主通道轮组件和副通道轮组件的外侧设有行走轮防护罩8,机架的四角处设有导向轮2;主通道轮组件6包括主通道轮61、主通道传动轴62以及第一链轮副63,主通道轮61对称设置在机架在主通道运行方向的两侧,主通道传动轴62两端驱动一对主通道轮61,主通道传动轴上通过第一链轮副63与行走驱动机构4驱动相连,且主通道轮61以及主通道传动轴62由螺杆升降机构3带动升降,主通道传动轴62的侧边安装三挡位置高度传感器64与电源控制单元5相连。螺杆升降机构3由两组分别安装在机架1内的螺杆升降单元31构成,每组螺杆升降单元31控制一侧的主通道轮61升降;螺杆升降单元31上部设有升降螺杆连接板32,升降螺杆连接板上安装托起货物的顶升板33;副通道轮组件7包括副通道轮71、副通道传动轴72以及第二链轮副73,副通道轮71对称设置在机架1在副通道运行方向的两侧,副通道传动轴72两端驱动一对副通道轮71,副通道传动轴72上通过第二链轮副73与行走驱动机构驱动4相连。
本实施例的主通道轮61中包括一对主动主通道轮611和一对从动主通道轮612,主动主通道轮通过第三链轮副613与主通道传动轴62相连。主通道传动轴62两端穿出机架1侧壁上的腰形孔11,主通道传动轴62的端部与主动主通道轮的其中一个主道轮614相连,相邻主道轮之间通过第三链轮副613相连;在主通道传动轴的中部设有传动轴升降导向架65,用于在主通道轮61升降时通过传动轴升降导向架65对主通道传动轴62进行稳定和导向,确保机器人在升降过程中状态的稳定。副通道轮71包括一对主动副通道轮711和一对从动副通道轮712,主动副通道轮711通过第四链轮副与副通道传动轴72相连;第四链轮副包括主动副通道轮的两个副道轮之间的传动链轮副714以及副通道传动轴72与其中一个副道轮之间的驱动链轮副713。两个副道轮之间的传动链轮副714设置在机架1的外侧,方便副通道轮71的拆卸和检修。
本实施例的螺杆升降单元31包括升降传动机311、升降传动轴312以及螺杆升降机34,安装在机架同侧的两个螺杆升降机34通过升降传动轴312相连,升降传动轴312由升降传动机311通过链轮副连接驱动;螺杆升降机顶部驱动顶升板33升降对货物进行托举,螺杆升降机34同时驱动主通道轮组件6的升降。行走驱动机构4包括行走电机41和双出轴减速机42,双出轴减速机42的两组输出轴分别通过第一链轮副63和第二链轮副73与主通道传动轴和副通道传动轴相连。
本实施例的工作过程:
当四向穿梭式搬运机器人运行到主通道时,升降传动机311启动运转,主通道轮组件6下移,车体状态如图7和图8所示,搬运机器人正处于面对主通道方向,这时主通道轮61与货架主通道轨道接触,实现四向穿梭式搬运机器人在主通道上的通行。此时可实现的功能有,主通道上运行,主通道上带货运行,进入提升机进行货物或整体换层。
当四向穿梭式搬运机器人从主通道进入副通道搬运货物时,在交叉口需进行车轮换向。此时车辆停止,升降传动机311启动运转,主通道轮组件6上移到中间位置,车体状态如图9和图10所示,搬运机器人正处于面对副通道方向,这时主通道轮61与主通道脱离,副通道轮71与副轨道接触,副通道轮运转,实现四向穿梭式搬运机器人在副通道上的运行,并找到需要搬运的货物。
当四向穿梭式搬运机器人在副通道找到需要搬运的货物时,车辆停止,此时升降传动机311启动,主通道轮组件6继续上移,将托盘托起,离开货架。此时副通道轮运行,四向穿梭式搬运机器人根据调度要求将货物搬移到主副通道交叉口,此时车体状态如图11和图12所示。
当四向穿梭式搬运机器人将货物搬移到主副通道交叉口后,车辆停止,升降传动机311反向旋转,主通道轮组6件下移,当主通道轮组件下移到图9和图10位置时货物与车体接触,主通道轮组件继续下移至图7和图8位置时,主通道轮61与主通道轨道接触,副通道轮71脱离副通道轨道,主通道轮运行,车体状态如图13和图14所示。此时四向穿梭式搬运机器人带着货物运行到指定副通道与主通道交叉口。
四向穿梭式搬运机器人带着货物运行到指定副通道与主通道交叉口后,车辆停止,升降传动机311旋转,主通道轮组件6持续上移,直至托盘及货物托起至图11和图12所示位置;此时副通道轮71运行,当到达指定货物停放位时,四向穿梭式搬运机器人停止,同时升降传动机311反向旋转,主通道轮组件6下移,下移至图9和图10位置时停止,完成一次货物搬运。如此往复,实现货物的出库、入库,实现快速仓储功能。
除上述实施例外,本发明还可以有其他实施方式。凡采用等同替换或等效变换形成的技术方案,均落在本发明要求的保护范围。
- 一种用于仓储物流四向穿梭式搬运机器人
- 用于仓储物流四向穿梭式搬运机器人