设定支持装置
文献发布时间:2023-06-19 10:08:35
技术领域
本发明涉及一种用于支持对马达控制装置的参数值设定的设定支持装置。
背景技术
已知有用于支持对马达控制装置的参数值设定的各种技术。例如在专利文献1中记载了一种技术:一边逐渐提高增益,一边试行错误地探索满足控制性能的增益。根据此技术,增益调整的专业知识少的用户也能够调整增益,以满足控制性能。但是,由于只能评估控制性能,因此专利文献1所记载的技术存在无法确保稳定性、由于试行错误次数多因而调整耗费时间等问题。而且,专利文献1中记载了一种能够一边取得各种评估指标的权衡(trade off),一边进行增益调整的技术。根据此技术,能够考虑稳定性来调整增益。但是,专利文献1所记载的技术中,关于将各种参数值设为何值的判断要依靠用户。因此,如果用户关于增益调整的知识不够充分,则即便使用所述技术,也无法良好地进行增益调整。
现有技术文献
专利文献
专利文献1:日本专利特开2011-244668号公报
专利文献2:日本专利特开2017-167607号公报
发明内容
发明所要解决的问题
本发明是有鉴于所述问题而完成,其目的在于提供一种设定支持装置,即便是与增益调整相关的知识不够充分的用户,也能对马达控制装置设定能够对马达控制装置赋予充分的稳定性及控制性能的参数值。
解决问题的技术手段
为了达成所述目的,基于本发明的一观点的设定支持装置支持对控制马达的马达控制装置的参数值设定,所述设定支持装置包括:指标值计算部,关于对所述马达控制装置所设定的第一参数的值与第二参数的值的组合不同的多个状况的各状况,计算表示所述马达控制装置所进行的马达控制的稳定性或控制性能的第一评估指标值;推荐值计算部,基于由所述指标值计算部所计算的关于各状况的所述第一评估指标值,计算所述第一参数的推荐值与所述第二参数的推荐值;以及推荐值显示部,将所述第一参数的所述推荐值及所述第二参数的所述推荐值,跟表示所述第一参数的值和所述第二参数的值的组合与所述第一评估指标值的关系的信息一同显示于显示器。
即,设定支持装置决定第一参数的推荐值与第二参数的推荐值,并将所决定的两推荐值,跟设定所述两推荐值时所获得的第一评估指标值所知晓的信息(表示所述第一参数的值和所述第二参数的值的组合与所述第一评估指标值的关系的信息)一同提示给用户,因而,根据本设定支持装置,即便是与增益调整相关的知识不够充分的用户,也能对马达控制装置设定能够对马达控制装置赋予充分的稳定性及控制性能的参数值。
另外,作为推荐值计算部根据关于各状况的第一评估指标值来计算两推荐值的计算方法,能够采用各种方法。例如,推荐值计算部也可计算获得了最接近期望值的第一评估指标值的状况的第一及第二参数值来作为各参数的推荐值。而且,若这样的第一及第二参数值存在多组,则既可基于第一参数值和/或第二参数值来从所述多组参数值中选择作为推荐值的一组参数值,也可通过其他算法(例如随机地)选择作为推荐值的一组参数值。
而且,在设定支持装置中,也可采用下述结构,即:“所述指标值计算部关于所述多个状况的各状况,计算所述第一评估指标值以及所述马达控制装置所进行的马达控制的、与所述第一评估指标值存在权衡关系的第二评估指标值,所述推荐值计算部基于由所述指标值计算部所计算的关于各状况的所述第一评估指标值及所述第二评估指标值,来计算所述第一参数的推荐值与所述第二参数的推荐值”。
推荐值显示部显示于显示器的表示所述第一参数的值和所述第二参数的值的组合与所述第一评估指标值的关系的信息也可为三维图表。
而且,推荐值显示部也可将等高线(contour)图显示于所述显示器,所述等高线图是将所述第一参数的值、所述第二参数的值分别设为纵轴及横轴中的其中一者、另一者,并以颜色或亮度来表示所述第一评估指标值的等高线图,且是在所述第一参数的所述推荐值及所述第二参数的所述推荐值所示的位置表示有规定标记(mark)的等高线图。推荐值显示部也可具有在所述等高线图上显示所述第二评估指标值的等值线的功能。而且,所述功能也可为将所述第二评估指标值的等值线以与所述第二评估指标值的值相应的颜色、亮度予以显示。
推荐值计算部也可计算与关于各状况的所述第一参数的值、所述第二参数的值各自之间存在正相关或负相关的值,来作为关于各状况的所述第二评估指标值。而且,指标值计算部也可计算表示所述马达控制装置所进行的马达控制的稳定性的值来作为所述第一评估指标值,计算表示所述马达控制装置所进行的马达控制的控制性能的值来作为所述第二评估指标值。
推荐值计算部也可基于各状况的所述第一评估指标值及所述第二评估指标值,来确定满足关于稳定性的要求规格及关于控制性能的要求规格且能够实现的性能为最低的状况,并计算关于所确定的状况的所述第一参数的值及所述第二参数的值,来作为所述第一参数的所述推荐值及所述第二参数的所述推荐值。
在设定支持装置中,也可采用下述结构,即:“所述指标值计算部关于所述多个状况的各状况,还计算第三评估指标值,所述第三评估指标值是关于所述马达控制装置所进行的马达控制的稳定性的、在与所述第一评估指标值不同的评估基准下的评估结果,所述推荐值计算部还使用由所述指标值计算部所计算的关于各状况的第三评估指标值,来计算所述第一参数的推荐值与所述第二参数的推荐值”。
在马达控制装置包含陷波滤波器(notch filter)或扭矩滤波器(torque filter)的情况下,也可计算包含所述马达控制装置的伺服系统的、在与所述陷波滤波器的中心频率或所述扭矩滤波器的阻断频率相应的频率下的增益,来作为所述第一评估指标值或所述第三评估指标值。
而且,在马达控制装置包含陷波滤波器或扭矩滤波器的情况下,也可对设定支持装置附加滤波器参数推荐值输出部,所述滤波器参数推荐值输出部分别基于对规定所述陷波滤波器或所述扭矩滤波器的频率特性的一个以上的参数的值进行指定的多个参数设定信息,对于所述多个参数设定信息的各信息,关于所述多个状况的各状况而计算以所述参数设定信息所指定的值被设定为所述陷波滤波器或所述扭矩滤波器的所述一个以上的参数的值时的所述第一评估指标值,并且基于所计算的关于各状况而计算的所述第一评估指标值,来判定各状况是否满足关于稳定性的要求规格,并将被判定为满足关于稳定性的要求规格的所述状况的范围为最广的所述参数设定信息所指定的所述一个以上的参数的值,作为所述陷波滤波器或扭矩滤波器的所述一个以上的参数的推荐值而输出。
也可对设定支持装置附加用户接口部,所述用户接口部依据来自用户的指示,对所述滤波器参数推荐值输出部设为处理对象的所述多个参数设定信息进行变更。
在马达控制装置包含陷波滤波器的情况下,也可对设定支持装置附加推荐值决定部,所述推荐值决定部根据所述马达控制装置所进行的马达控制的增益特性的测定结果,来决定对所述陷波滤波器的频率特性进行规定的一个以上的参数的推荐值。
指标值计算部也可根据所述马达控制装置所进行的马达控制的增益特性的测定结果,求出包含所述马达的规定部分的频率传递函数,并使用所求出的频率传递函数,来计算关于所述多个状况的各状况的所述第一评估指标值。进而,指标值计算部也可使用所述频率传递函数,来计算关于所述多个状况的各状况的所述第二评估指标值。
指标值计算部也可不进行积分运算,而根据所述频率传递函数来计算关于所述多个状况的各状况的所述第二评估指标值。而且,指标值计算部也可具有下述功能,即,根据所述第一参数或所述第二参数的值,来决定各状况下的所述第一参数、所述第二参数以外的至少一个参数的值。
基于本发明的一观点的设定支持装置支持对为了同步地控制两轴以上的马达而使用的多个马达控制装置的参数值设定,所述设定支持装置包括:第一评估指标值计算部件,针对成为参数值设定支持对象的每个马达控制装置,关于对所述马达控制装置设定的第一参数的值与第二参数的值的组合不同的多个状况的各状况,而计算表示所述马达控制装置所进行的马达控制的稳定性的第一评估指标值;确定部件,按照所述状况来确定由所述第一评估指标值计算部件所计算的所述第一评估指标值的最差值;推荐值计算部件,基于由所述确定部件按照所述状况而确定的所述最差值,计算所述第一参数的推荐值与所述第二参数的推荐值;以及推荐值显示部件,将所述第一参数的所述推荐值及所述第二参数的所述推荐值,跟表示所述第一参数的值和所述第二参数的值的组合与所述第一评估指标值的所述最差值的关系的信息一同显示于显示器。
根据所述设定支持装置(以下也称作第二设定支持装置),即便是与增益调整相关的知识不够充分的用户,也能对为了同步地控制两轴以上的马达而使用的多个马达控制装置,设定能够对各马达控制装置赋予充分的稳定性及控制性能的参数值。
作为第二设定支持装置的推荐值计算部件根据关于各状况的最差值来计算两推荐值的计算方法,能够采用各种方法。例如,推荐值计算部件也可计算获得了最接近期望值的最差值的状况的第一及第二参数值来作为各参数的推荐值。而且,若这样的第一及第二参数值存在多组,则既可基于第一参数值和/或第二参数值来从所述多组参数值中选择作为推荐值的一组参数值,也可通过其他算法(例如随机地)选择作为推荐值的一组参数值。
而且,在第二设定支持装置中,也可采用下述结构,即:“所述推荐值计算部件基于按照所述状况的最差值的确定结果,来判定所述各状况是否满足关于稳定性的要求规格,针对被判定为满足所述要求规格的每种所述状况,计算关于所述马达控制装置所进行的马达控制的、与所述第一评估指标值存在权衡关系的第二评估指标值,并基于所计算的关于各状况的所述第二评估指标值,来计算所述第一参数的推荐值与所述第二参数的推荐值”。
发明的效果
根据本发明,能够提供一种设定支持装置,即便是与增益调整相关的知识不够充分的用户,也能够对马达控制装置设定能对马达控制装置赋予充分的稳定性及控制性能的参数值。
附图说明
图1是本发明的一实施方式的设定支持装置10的使用形态例的说明图。
图2是用于说明马达控制装置的参数的框图。
图3是设定支持装置10的功能框图。
图4是闭环增益波峰量、共振波峰余裕的说明图。
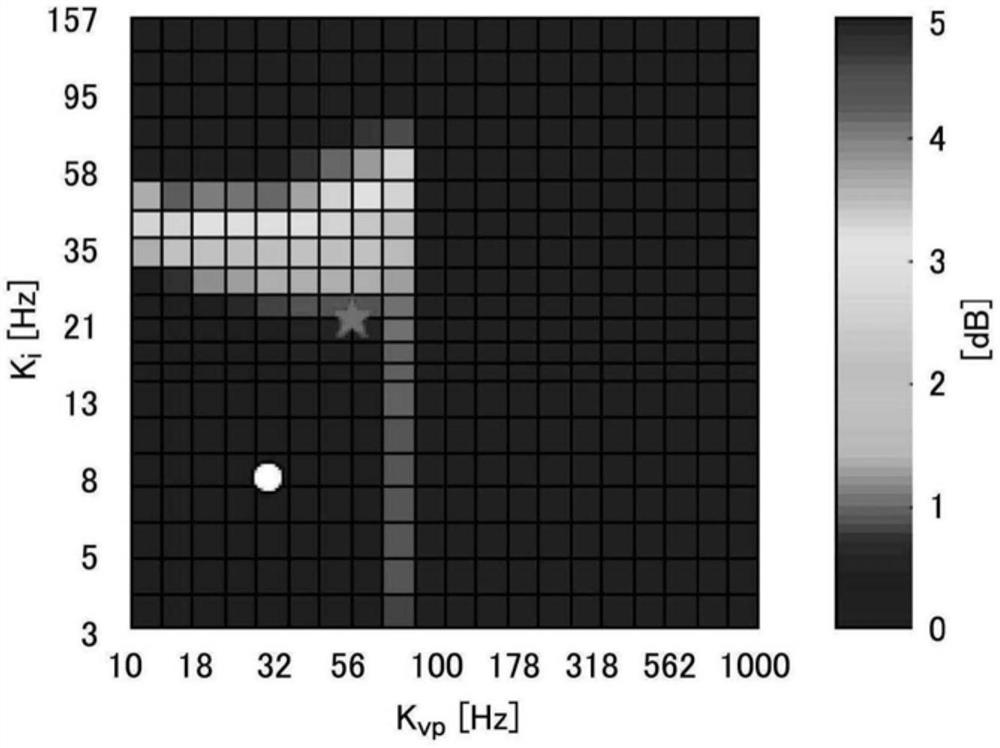
图5是稳定性映射图的说明图。
图6是稳定性映射图的说明图。
图7是稳定性指标值计算处理的流程图。
图8是位置闭环特性Gp_closed、位置开环特性Gp_open、速度闭环特性Gv_closed及速度开环特性Gv_open的说明图。
图9是第二陷波滤波器参数计算处理的流程图。
图10是最佳化等级设定用项目的说明图。
图11是第二陷波滤波器参数计算处理的效果的说明图。
图12是第二陷波滤波器参数计算处理的效果的说明图。
图13是第三陷波滤波器参数计算处理的流程图。
图14是用于说明第三陷波滤波器参数计算处理的内容的图。
图15是使多个轴协调运行的系统例的说明图。
图16是在图15所示的系统中可能产生的现象的说明图。
图17是用于说明多轴用参数值设定支持处理的内容的图。
具体实施方式
以下,基于附图来说明本发明的实施方式。
图1中表示本发明的一实施方式的设定支持装置10的使用形态例。
本实施方式的设定支持装置10是为了支持对马达控制装置30的参数值设定,而与一台以上的(图1中为一台)马达控制装置30连接使用的装置。
马达控制装置30是依据从可编程逻辑控制器(Programmable Logic Controller,PLC)等上位装置(省略图示)输入的指令(位置指令、扭矩指令或速度指令)来控制与负载装置42连接的马达41的装置。以下,将包含马达41与负载装置42的部分称作控制对象40,将包含马达控制装置30与控制对象40的部分称作伺服系统。
马达控制装置30在从上位装置输入有位置指令时,如图2所示,作为位置控制器31、速度控制器32、电流控制器34、位置检测器35等而运行。
位置检测器35是通过对由安装于马达41或负载装置42的编码器(省略图示)所检测的控制对象40的速度(以下称作检测速度)进行积分,从而输出控制对象40的位置(以下称作检测位置)的单元。
位置控制器31是具有位置比例增益Kpp作为参数的单元。如图所示的那样,对于所述位置控制器31,输入位置指令与检测位置的偏差即位置偏差。并且,位置控制器31计算将所述位置偏差乘以位置比例增益Kpp所得的值即速度指令并予以输出。
速度控制器32是进行将速度指令与检测速度的偏差即速度偏差作为操作量,并将扭矩指令作为控制量的比例积分(Proportional Integral,PI)控制的单元。所述速度控制器32具有速度比例增益Kvp与积分增益Ki作为参数。
而且,速度控制器32包含可设定启用/关闭(ON/OFF)(是否发挥功能)的扭矩滤波器(低通滤波器(low pass filter))及陷波滤波器。速度控制器32内的扭矩滤波器具有截止频率作为参数,速度控制器32内的陷波滤波器具有中心频率、陷波深度及Q值(=中心频率/陷波宽度)作为参数。
电流控制器34是生成与来自速度控制器32的扭矩指令相应的驱动电流并供给至马达的单元。
以上述内容为前提,以下具体说明设定支持装置10的结构及动作。
图3表示设定支持装置10的功能框图。
本实施方式的设定支持装置10是在个人计算机(Personal Computer,PC)中安装有设定支持程序的装置。如图3所示,安装于PC的设定支持程序使PC的本体部分(包含中央处理器(Central Processing Unit,CPU)及其周边元件的部分)13作为运算处理部14、用户接口(User Interface,UI)部15及显示控制部16而运行。
显示控制部16是在显示装置12的画面上显示从运算处理部14或UI部15所指示的内容的图像的功能块。
运算处理部14是可执行陷波滤波器参数计算处理、推荐值计算处理、显示/设定处理、设定/显示处理等的功能块。
陷波滤波器参数计算处理是计算速度控制器32内的陷波滤波器的各参数的推荐值并对马达控制装置30进行设定的处理。在所述陷波滤波器参数计算处理中,有第一至第三陷波滤波器参数计算处理。
推荐值计算处理是包含稳定性指标值计算处理与控制性能指标值/推荐值计算处理的处理。
稳定性指标值计算处理是关于对马达控制装置30设定的第一参数的值与第二参数的值的组合不同的多个状况的各状况,计算表示马达控制装置所进行的马达控制的稳定性的稳定性指标值的处理。所述稳定性指标值计算处理是用户能够指定将第一、第二参数设为哪个参数的处理,并且是能够将增益余裕、相位余裕、闭环增益波峰量、共振波峰余裕中的一个以上的值指定为要计算的稳定性指标值的处理。另外,所谓闭环增益波峰量、共振波峰余裕,如图4示意性地所示,分别是指增益特性中的低频率侧的峰值、共振频率下的增益余裕。
而且,稳定性指标值计算处理是能够指定将第一、第二参数以外的各参数的值设为固定值(用户所指定的值),还是设为与第一或第二参数值相应的值的处理。进而,稳定性指标值计算处理是也能够指定将第一、第二参数的其中一个值设为固定值(用户所指定的值)的处理。
控制性能指标值/推荐值计算处理是至少关于通过稳定性指标值计算处理而计算的稳定性指标值满足稳定性要求规格的各状况,计算表示马达控制装置30所进行的马达控制的控制性能的控制性能指标值,并基于计算结果而计算满足稳定性要求规格及控制性能要求规格的第一及第二参数的值来作为各参数的推荐值的处理。所述控制性能指标值/推荐值计算处理是能够将轨道追随延迟时间、稳态偏差、稳定时间、轨道追随性能的替代特性值、稳态偏差的替代特性值、稳定时间的替代特性值、斜坡(ramp)响应追随性的替代特性值中的一个以上的值指定为要计算的控制性能指标值的处理。
此处,所谓稳定性要求规格,是指以设为计算对象的一个以上的稳定性指标值的值来规定应判定为满足稳定性要求的条件的信息(例如“闭环增益波峰量为1dB以下”、“闭环增益波峰量为1dB以下且共振波峰余裕(共振频率下的增益余裕)为5dB以上”)。而且,所谓控制性能要求规格,是指以控制性能指标值的值来规定应判定为满足控制性能要求的条件的信息。所述控制性能要求规格是针对每个控制性能指标值(按照控制性能指标值)而设定的信息,在控制性能指标值/推荐值计算处理中,针对每个控制性能要求规格来计算推荐值。
显示/设定处理是将通过控制性能指标值/推荐值计算处理而计算的各推荐值与各状况的稳定性指标值一同作为处理结果而显示于显示装置12的画面上,并在用户进行了确认操作时将所计算的各推荐值设定至马达控制装置30的处理。设定/显示处理是在将通过控制性能指标值/推荐值计算处理而计算的各推荐值设定至马达控制装置30后,将各推荐值与各状况的稳定性指标值一同作为处理结果而显示于显示装置12的画面上的处理。
图5表示通过显示/设定处理或设定/显示处理来作为处理结果而显示于显示装置12的画面上的图像(以下称作稳定性映射图)的一例。如图所示的那样,稳定性映射图基本上是针对第一参数(图中为速度比例增益Kvp)的值与第二参数(图中为积分增益Ki)的值的各组合,在以颜色表示稳定性指标值的等高线图上显示有表示推荐值的图形(☆)的图。另外,显示在稳定性映射图内的○是表示后述的位置闭环特性Gp_closed测量时的第一及第二参数的设定值的图形。
但是,在用户指定了多个控制性能要求规格的情况下,作为稳定性映射图,则显示在等高线图上根据控制性能要求规格而表示有推荐值的图像。进而,在用户指定了与某个控制性能指标值相关的等值线的显示的情况下,如图6所示,在等高线图上将所述控制性能评估值相同的点相连的等值线以颜色来显示控制性能评估值。
UI部15(图3)是通过用户操作鼠标、键盘等输入装置11来指定使运算处理部14执行的处理的内容,从而使运算处理部14执行由用户所指定的内容的处理的功能块。
所述UI部15构成为,用户能够使运算处理部14执行以下例示的一连串处理。
·处理例1
执行陷波滤波器参数计算处理(第一~第三陷波滤波器参数计算处理的任一个),
执行将第一参数、第二参数分别设为Kvp、ki,将稳定性指标值设为闭环增益波峰量,将稳定性指标值设为稳态偏差的替代特性值的推荐值计算处理,
执行设定/显示处理(或者显示/设定处理)。
·处理例2
执行陷波滤波器参数计算处理,
执行将第一参数、第二参数分别设为Kvp、ki,将稳定性指标值设为闭环增益波峰量,将稳定性指标值设为稳态偏差的替代特性值的推荐值计算处理,
执行将第一参数、第二参数分别设为Kpp、ki且将ki固定为通过已完成的推荐值计算处理而获得的推荐值的推荐值计算处理,
执行设定/显示处理(或者显示/设定处理)。
·处理例3
执行陷波滤波器参数计算处理,
执行将第一参数、第二参数分别设为Kvp、kpp,将ki设为Kvp·4,将稳定性指标值设为闭环增益波峰量,将稳定性指标值设为稳态偏差的替代特性值的推荐值计算处理,
执行设定/显示处理(或者显示/设定处理)。
以下,进一步具体说明运算处理部14可执行的各种处理。另外,在本设定支持装置10的使用时,通常是在最开始执行陷波滤波器参数计算处理,但为了便于说明,以下将在进行了推荐值计算处理(稳定性指标值计算处理及控制性能指标值计算处理)的说明后,对陷波滤波器参数计算处理进行说明。
《稳定性指标值计算处理》
图7表示稳定性指标值计算处理的流程图。在本流程图及以下的说明中,位置闭环特性Gp_closed、位置开环特性Gp_open、速度闭环特性Gv_closed、速度开环特性Gv_open分别是指伺服系统的、在图8的虚线框51~54内所示的部分的频率传递函数。
如图7所示,在稳定性指标值计算处理时,运算处理部14首先进行通过控制马达控制装置30来测量位置闭环特性Gp_closed(复数的排列)的处理(步骤S101)。此步骤的处理既可为“一边将以包含多个频率成分的方式进行时间变化的位置指令输入至马达控制装置30,一边周期性地收集检测位置,对所输入的位置指令与所收集的检测位置进行傅里叶变换而取比,由此来计算位置闭环特性Gp_closed的处理”,也可为“依靠马达控制装置30进行位置闭环特性Gp_closed的测量,并从马达控制装置30获取测量结果的处理”。
完成了步骤S101的处理的运算处理部14根据所测量的位置闭环特性Gp_closed与在此时间点对马达控制装置30的各部所设定的各种参数值,计算控制对象特性P(控制对象40的频率传递函数P)(步骤S102)。
更具体而言,运算处理部14在所述步骤S102中,首先,根据此时间点(Gv_closed的测量时间点)的各种参数(Kpp、Kvp、Ki、滤波器参数)的设定值,确定位置控制器31的特性(频率传递函数,以下同样)Cp及速度控制器32的特性Cv。
接下来,运算处理部14基于所确定的特性Cp、Cv等依序进行以下的运算,由此计算控制对象特性P。另外,以下的式(2)中的Ci为位置检测器35的特性(频率传递函数)。
Gp_open=Gp_closed/(1-Gp_closed)…(1)
Gv_closed=Gp_open/(Cp·Ci)…(2)
Gv_open=Gv_closed/(1-Gv_closed)…(3)
P=Gv_open/Cv…(4)
即,运算处理部14首先根据位置闭环特性Gp_closed而求出位置开环特性Gp_open(式(1))。接下来,运算处理部14从位置开环特性Gp_open中去除特性Cp及特性Ci,由此求出速度闭环特性Gv_closed(式(2))。进而,运算处理部14根据速度闭环特性Gv_closed而求出速度开环特性Gv_oepn(式(3))。接下来,运算处理部14从速度开环特性Gv_open中去除Cv,由此计算控制对象特性P(式(4))。
完成了步骤S102的处理的运算处理部14开始步骤S103~S106的处理循环,首先,存储处理对象状况为多个评估对象状况中的最开始的评估对象状况的情况(步骤S103)。此处,所谓多个评估对象状况,是指由用户指定为设定对象参数的两参数(Ki与Kvp、Kpp与Kvp等)的值的组合互不相同的状况。另外,评估对象状况的数量、各评估对象状况的具体内容是由运算处理部14根据两设定对象参数的组合而自动决定。此时,运算处理部14根据用户的指定,将关于各评估对象状况的设定对象参数以外的各参数值设为固定值(用户所指定的值)或根据第一或第二参数而求出的值。
完成了步骤S103的处理的运算处理部14确定处理对象状况下的各部的特性(位置控制器31的特性Cp与速度控制器32的特性Cv)(步骤S104)。并且,运算处理部14根据所确定的各部的特性与控制对象特性P,计算处理对象状况下的Gp_closed(步骤S104)。该步骤104的处理是通过依序进行以下的运算而计算Gp_closed的处理(参照图8)。
Gv_open=Cv·P
Gv_closed=(Gv_open)/(1+Gv_open)
Gp_open=Cp·Ci·Gv_closed
Gp_closed=Gp_open/(1+Gp_open)
完成了处理对象状况下的Gp_closed的计算的运算处理部使用所述Gp_closed,计算/存储由用户所指定的数量、种类的稳定性指标值(例如仅为增益余裕、或者闭环增益波峰量与共振波峰余裕)(步骤S105)。
完成了步骤S105的处理的运算处理部14判断是否残留未处理的评估对象状况(步骤S106)。若残留有未处理的评估对象状况(步骤S106;是),则运算处理部14返回步骤S103,执行针对下个评估对象状况的处理。
并且,运算处理部14在已完成了针对所有评估对象状况的处理时(步骤S106;否),结束所述稳定性指标值计算处理。
《控制性能指标值/推荐值计算处理》
控制性能指标值/推荐值计算处理是如下所述的处理,即,基于稳定性指标值计算处理(图7)的处理结果、稳定性要求规格与一个以上的控制性能要求规格,针对每个控制性能要求规格,计算满足稳定性要求规格及控制性能要求规格的、控制性能最差的两设定对象参数值,以作为两设定对象参数的推荐值。另外,并非计算控制性能最佳的两设定对象参数值,而是计算控制性能最差的两设定对象参数值来作为两设定对象参数的推荐值是因为:若多确保稳定性,则即使因控制对象40的经时变化等导致稳定性发生劣化,也能够维持满足稳定性要求规格的状态。
如已说明的那样,设定支持装置10构成为下述装置,即,能够将轨道追随延迟时间、稳态偏差、稳定时间、轨道追随性能的替代特性值、稳态偏差的替代特性值、稳定时间的替代特性值、斜坡响应追随性的替代特性值中的一个以上的值,指定作为用于控制性能的判定的控制性能指标值。
在控制性能指标值/推荐值计算处理时,运算处理部14基于在稳定性指标值计算处理时获得的各评估对象状况下的Gv_close来进行卷积运算,由此来计算各评估对象状况下的轨道追随延迟时间、稳态偏差、稳定时间。并且,运算处理部14基于关于各评估对象状况而计算的控制性能指标值(轨道追随延迟时间等)、通过稳定性指标值计算处理而计算的关于各评估对象状况的稳定性指标值,计算满足稳定性要求规格及控制性能要求规格的、控制性能最差的两设定对象参数值,来作为两设定对象参数的推荐值。
而且,在推荐值计算处理时,运算处理部14不进行卷积运算而计算其他的各控制性能指标值。
具体而言,运算处理部14计算以下的L值以作为轨道追随性能的替代特性值。
L=SQR(第一参数值
另外,α是根据第一参数与第二参数的组合而预先规定的值(>0)。
而且,运算处理部14分别计算在稳定性指标值计算处理时所获得的各评估对象状况下的Gv_closed的第一个排列值(最低频率侧的排列值)Gv_closed[1]、第k个排列值Gv_closed[k],以作为稳态偏差的替代特性值、稳定时间的替代特性值。另外,所谓Gv_closed[k],是指Gv_closed的、相当于下述时间的倒数的频率成分,所述时间是由用户指定作为稳定时间的替代特性值的评估时间的时间。
而且,运算处理部14对于斜坡响应追随性的替代特性值,计算将各评估对象状况下的Gv_closed进一步乘以1/(jω)(ω为指定的频率)所得的值。
并且,运算处理部14基于关于各评估对象状况而计算的控制性能指标值(替代特性值)、通过稳定性指标值计算处理而计算的关于各评估对象状况的稳定性指标值,计算满足稳定性要求规格及控制性能要求规格的、控制性能最差的两设定对象参数值,以作为两设定对象参数的推荐值。
此处,关于所述的各替代特性值,预先补充若干个事项。
在伯德图(Bode diagram)的未出现增益波峰的稳定区域内,在轨道追随性能与各增益值(Kpp值、Kvp值、Ki值)之间存在大致正的相关。因此,能够使用所述L值来作为轨道追随性能的替代特性值。而且,在稳态偏差与Gv_closed[1]之间、稳定时间与Gv_closed[k]之间、斜坡响应追随性与Gv_closed/(jω)之间,也存在大致正的相关。因此,也能够使用稳态偏差、稳定时间斜坡、响应追随性的各替代特性值来作为控制性能的指标值。
并且,所述的各替代特性值是通过简单的运算而得出,因此比起需要卷积运算的轨道追随延迟时间等,能够以短时间而计算。因而,只要将所述替代特性值指定用于控制性能的判定,便能够在极短时间内获得各设定对象参数的推荐值。
《陷波滤波器参数计算处理》
如已说明的那样,陷波滤波器参数计算处理有第一~第三陷波滤波器参数计算处理。以下,依序说明第一~第三陷波滤波器参数计算处理的内容。
·第一陷波滤波器参数计算处理
被指示了第一陷波滤波器参数计算处理的执行的运算处理部14按照以下的流程,计算速度控制器32内的陷波滤波器的各参数的推荐值并设定至马达控制装置30。
开始了第一陷波滤波器参数计算处理的运算处理部14首先将陷波滤波器设为关闭。接下来,运算处理部14通过控制马达控制装置30来测量位置闭环特性Gp_closed。此处,所谓位置闭环特性Gp_closed,是指伺服系统的频率传递函数(复数的排列)。所述Gp_closed的测量处理既可为“一边将以包含多个频率成分的方式进行时间变化的位置指令输入至马达控制装置30,一边周期性地收集检测位置,对所输入的位置指令与所收集的检测位置进行傅里叶变换而取比,由此来计算位置闭环特性Gp_closed的处理”,也可为“依靠马达控制装置30进行位置闭环特性Gp_closed的测量,并从马达控制装置30获取测量结果的处理”。
并且,运算处理部14以抑制所测量的Gp_closed中的共振波峰的方式,来决定陷波滤波器的各参数(中心频率ωn、陷波深度d、陷波宽度Δω)的推荐值,并将所决定的各推荐值设定至马达控制装置30后,结束第一陷波滤波器参数计算处理。
·第二陷波滤波器参数计算处理
图9表示第二陷波滤波器参数计算处理的流程图。
如图所示的那样,开始了第二陷波滤波器参数计算处理的运算处理部14首先通过控制马达控制装置30来测量位置闭环特性Gp_closed(步骤S201)。所述测量处理与稳定性指标值计算处理(图7)的步骤S101的处理相同。而且,运算处理部14在步骤S201中还进行下述处理,即,根据位置闭环特性Gp_closed来确定作为陷波滤波器的中心频率的推荐值的、共振波峰的频率。
接下来,运算处理部14在步骤S202中进行与稳定性指标值计算处理的步骤S102为相同内容的处理。
随后,运算处理部14存储通过此次执行的步骤S204~S207的处理循环而评估的陷波滤波器的深度d、Q值的组合是多个评估对象值对中的最开始的评估对象值对的情况(步骤S203)。此处,所谓多个评估对象值对,是指根据用户所指定的陷波滤波器的最佳化等级而规定了总数或各评估对象值对的内容的信息。更具体而言,本实施方式的UI部15使显示控制部16在显示装置12的画面上显示图10所示的最佳化等级设定用项目(所谓的滑块控制)。并且,UI部15例如在指定了最高等级作为最佳化等级的情况下,将包含[0、5、10、15、20]中的一个值与[0.8、1.0、1.2、1.4、1.6]中的一个值的、深度d与Q值的总计25个对为“多个评估对象值对”的意旨通知给运算处理部14。
完成了步骤S203(图9)的处理的运算处理部14开始步骤S204~S207的处理循环。所述处理循环除了在步骤S204中设定的处理对象状况是关于除了陷波滤波器的各参数以外的参数的设定状况、及各处理对象状况下的稳定性指标值是按照评估对象值对而存储(步骤S206)以外,与稳定性指标值计算处理(图7)的步骤S103~S107的处理循环相同。
运算处理部14在已无未处理的评估对象状况时(步骤S207,否),脱离步骤S204~S207的处理循环。并且,运算处理部14在残留有未处理的评估对象值对的情况下(步骤S208;是),返回步骤S203,执行对下个评估对象值对的处理。
运算处理部14在已无未处理的评估对象值对的情况下(步骤S208;否),基于关于各评估对象值对的处理结果,确定能够确保稳定性的范围最广的评估对象值对(步骤S209)。作为此处理,例如在进行等高线图显示的情况下,进行确定稳定性指标值满足规定条件的区域为最广的评估对象值对的处理。
并且,运算处理部14将所确定的评估对象值对与在步骤S201中所确定的中心频率一同设定至马达控制装置30(步骤S209)后,结束所述第二陷波滤波器参数计算处理。
根据所述第二陷波滤波器参数计算处理,例如像图11(A)、图11(B)所示的那样,能够扩大伺服系统的稳定区域。另外,图11(A)是陷波滤波器为关闭(陷波滤波器的深度为“0”)时的伺服系统的稳定性映射图,图11(B)是第二陷波滤波器参数计算处理完成后的伺服系统的稳定性映射图。
并且,在第二陷波滤波器参数计算处理后,进行所述内容的推荐值计算处理,因此根据本实施方式的设定支持装置10,如图12(A)、图12(B)所示的那样,能够提高控制频带。
·第三陷波滤波器参数计算处理
图13表示第三陷波滤波器参数计算处理的流程图。
所述第三陷波滤波器参数计算处理是对第二陷波滤波器参数计算处理进行变形,以使得能够更高速地计算陷波滤波器的各参数的推荐值的处理。
如图所示的那样,开始了第三陷波滤波器参数计算处理的运算处理部14首先在步骤S301、S302中,分别进行与第三陷波滤波器参数计算处理(图9)的步骤S201、S202相同的处理。
接下来,运算处理部14存储通过此次执行的步骤S304~S307的处理循环而评估的陷波滤波器的深度d、Q值的组合是多个评估对象值对中的最开始的评估对象值对的情况(步骤S303)。而且,在所述步骤S303中,运算处理部14还存储通过此次执行的步骤S304~S307的处理循环而评估的Kvp值是Kvp的初始值(例如1[Hz])的情况。
完成了步骤S303的处理的运算处理部14开始步骤S304~S307的处理循环,首先,设Ki=Kvp/4,计算稳定性指标值(步骤S304)。更具体而言,运算处理部14假定马达控制装置30处于陷波滤波器的中心频率是在步骤S301中所确定的频率,陷波滤波器的深度d、Q值的组合为当前评估对象对,Kvp值是在步骤S303或S306中所设定的值,且Ki值为Kvp值的1/4的状况下,使用控制对象特性P来求出所述状况下的位置闭环特性Gp_closed。并且,运算处理部14根据所求出的Gp_closed来计算稳定性指标值。
完成了步骤S304的处理的运算处理部14判断所计算的稳定指标值是否满足稳定性要求规格(步骤S305)。
若所计算的稳定指标值满足稳定性要求规格(步骤S305;是),则运算处理部14将当前Kvp值存储为关于当前评估对象值对的最大Kvp值(步骤S306)。另外,此处理是对现有的最大Kvp值进行改写的处理。接下来,运算处理部14进行使Kvp值增加规定量的处理(步骤S307)后,再次开始步骤S304以后的处理。
而且,若所计算的稳定指标值不满足稳定性要求规格(步骤S305;否),则运算处理部14判断是否残留有未处理的评估对象值对(步骤S308)。接下来,若残留有未处理的评估对象值对(步骤S308;是),则运算处理部14返回步骤S303,开始对下个评估对象值对的处理。
若已无未处理的评估对象值对(步骤S308;否),则运算处理部14基于关于各评估对象值对的最大Kvp值,确定最大Kvp值为最大的评估对象值对(步骤S309)。例如,若关于各评估对象值对而获得的最大Kvp值为图14所示的情况,则运算处理部14确定最大Kvp值为“107”的评估对象值对(陷波深度“10”、Q值“1.6”)。接下来,运算处理部14将所确定的评估对象值对与在步骤S301中所确定的中心频率一同设定至马达控制装置30(步骤S309)后,结束所述第三陷波滤波器参数计算处理。
设定支持装置10(运算处理部14)构成为,除了所述的各种处理以外,还能够进行多轴用参数值设定支持处理。
多轴用参数值设定支持处理是用于支持对双马达控制装置30的参数值设定的处理,所述双马达控制装置30对具有图15所示的结构的龙门架(gantry)那样的、使多个轴(X1轴、X2轴)协调运行的系统的X1轴、X2轴进行控制。
图15所示的系统中,若各轴的频率特性不相同,则有可能发生偏摆(yawing)等不理想的举动。因此,多设定同一个值来作为各轴的增益,但各轴的频率特性会根据机械结构或龙门架位置、负载位置等而变化。例如,在负载偏向X2轴的状态下,与X1轴相关的速度闭环频率特性和与X2轴相关的速度闭环频率特性如图16所示那样变得不同。
因此,设定同一个值来作为各轴的增益,有时并不能确保两轴控制的稳定性。
为了确保两轴控制的稳定性,在多轴用参数值设定支持处理中,首先,在负载偏向X2轴(或X1轴)的状态下,关于X1轴控制用马达控制装置30、X2轴控制用马达控制装置30的各马达控制装置,例如进行将设定对象参数设为位置比例增益Kpp及速度比例增益Kvp的稳定性指标值计算处理(图7)。
接下来,根据关于X1轴控制用马达控制装置30的稳定性指标值计算处理的处理结果(关于多个状况的各状况的稳定性指标值)、与关于X2轴控制用马达控制装置30的稳定性指标值计算处理的处理结果,进行确定各状况下的稳定性指标值的最差值的最差值确定处理。即,进行相当于下述处理的处理,即:根据图17所示的X1轴稳定性映射图及X2轴稳定性映射图来生成本图所示的合成稳定性映射图。
随后,使用最差值确定处理的处理结果(将通过最差值确定处理而获得的各最差值作为稳定性指标值来处理),对X1轴或X2轴控制用马达控制装置30进行控制性能指标值/推荐值计算处理。并且,在由用户进行确认后(或者未经用户确认),将所计算的两推荐值设定至X1轴控制用马达控制装置30与X2轴控制用马达控制装置30,并结束多轴用参数值设定支持处理。
如以上所说明的那样,本实施方式的设定支持装置10能够考虑稳定性及控制性能这两者来决定两参数的推荐值并予以输出。因而,根据本设定支持装置10,即便是与增益调整相关的知识不够充分的用户,也能够对马达控制装置30设定能对马达控制装置30赋予充分的稳定性及控制性能的参数值。
《变形例》
所述设定支持装置10可进行各种变形。例如,也可将第一~第三陷波滤波器参数计算处理变形为下述处理,即,将所计算的各推荐值提示给用户,得到确认后,将各推荐值设定至马达控制装置30。也可将第二、第三陷波滤波器参数计算处理变形为计算陷波滤波器以外的滤波器(位置滤波器、扭矩滤波器)的参数的推荐值的处理。也可将设定支持装置10变形为显示三维图表作为稳定性映射图的装置。
而且,作为轨道追随性能(或其他性能)的替代特性值,也可使用与SQR(第一参数值
也可将设定支持装置10变形为根据关于各状况的第一评估指标值来计算(确定)第一及第二参数的推荐值的装置。作为根据关于各状况的第一评估指标值来计算两推荐值的计算方法,能够例示下述方法,即,计算获得了最接近期望值的第一评估指标值的状况的第一及第二参数值来作为各参数的推荐值。另外,若这样的第一及第二参数值存在多组,则也可基于第一参数值和/或第二参数值,从所述多组参数值中选择作为推荐值的一组参数值。更具体而言,也可从多组参数值中检索第一参数值最大或最小的参数值、或者根据第一参数值与第二参数值而求出的值(所述L值等)为最大或最小的参数值,将检索结果作为第一及第二参数的推荐值。而且,也可通过其他算法(例如随机地)从所述多组参数值中选择作为推荐值的一组参数值。
同样,也可将多轴用参数值设定支持处理变形为根据关于各状况的最差值来计算(确定)第一及第二参数的推荐值的处理。而且,也能够将设定支持装置变形为下述装置,即,计算表示控制性能的评估指标值来作为第一评估指标值,且计算表示稳定性的评估指标值来作为第二评估指标值。但是,若像这样对设定支持装置进行变形,则通常直至获得推荐值为止需要更长的时间,因此优选采用所述实施方式的结构。
《附注》
一种设定支持装置(10),支持对控制马达(41)的马达控制装置(30)的参数值设定,所述设定支持装置(10)的特征在于包括:
指标值计算部(14),关于对所述马达控制装置(30)所设定的第一参数的值与第二参数的值的组合不同的多个状况的各状况,计算表示所述马达控制装置(30)所进行的马达控制的稳定性或控制性能的第一评估指标值;
推荐值计算部(14),基于由所述指标值计算部(14)所计算的关于各状况的所述第一评估指标值,计算所述第一参数的推荐值与所述第二参数的推荐值;以及
推荐值显示部(14、16),将所述第一参数的所述推荐值及所述第二参数的所述推荐值,跟表示所述第一参数的值和所述第二参数的值的组合与所述第一评估指标值的所述最差值的关系的信息一同显示于显示器。
一种设定支持装置(10),支持对为了同步地控制两轴以上的马达(41)而使用的多个马达控制装置(30)的参数值设定,所述设定支持装置(10)的特征在于包括:
第一评估指标值计算部件(14),针对成为参数值设定支持对象的每个马达控制装置指标值,关于对所述马达控制装置指标值设定的第一参数的值与第二参数的值的组合不同的多个状况的各状况,而计算表示所述马达控制装置(30)所进行的马达控制的稳定性的第一评估指标值;
确定部件(14),按照所述状况来确定由所述第一评估指标值计算部件(14)所计算的所述第一评估指标值的最差值;
推荐值计算部件(14),基于由所述确定部件按照所述状况而确定的所述最差值,计算所述第一参数的推荐值与所述第二参数的推荐值;以及
推荐值显示部件(14、16),将所述第一参数的所述推荐值及所述第二参数的所述推荐值,跟表示所述第一参数的值和所述第二参数的值的组合与所述第一评估指标值的所述最差值的关系的信息一同显示于显示器。
符号的说明
10:设定支持装置
11:输入装置
12:显示装置
13:本体部分
14:运算处理部
15:UI部
16:显示控制部
30:马达控制装置
31:位置控制器
32:速度控制器
34:电流控制器
35:位置检测器
40:控制对象
41:马达
42:负载装置
- 设定支持装置、设定支持方法、信息处理程序及记录介质
- 支持菜单栏自定义设定的系统及菜单栏自定义设定的方法