一种汽车启动、倒退和低速行驶时周围视野盲区检测系统
文献发布时间:2023-06-19 10:21:15
技术领域
本发明涉及汽车安全技术领域,具体是指一种汽车启动、倒退和低速行驶时周围视野盲区检测系统。
背景技术
驾驶员在行车过程中有80%的交通信息都是通过视觉获得,良好的驾驶视野是保证行车安全的必要条件。但是驾驶员在驾驶汽车启动、倒退、转弯时仍存在视野盲区,汽车行驶盲区是造成交通事故的重要因素,可靠消除汽车启动、倒退和40码以内行驶的汽车盲区,对行人等第三方交通安全,具有重大意义。
所以,一种汽车启动、倒退和低速行驶时周围视野盲区检测系统成为人们亟待解决的问题。
发明内容
本发明要解决的技术问题是现有技术中视觉盲区检测系统的检测功能单一,不能准确提供视觉盲区的信息的问题。
为解决上述技术问题,本发明提供的技术方案为:一种汽车启动、倒退和低速行驶时周围视野盲区检测系统,包括摄像头、摄像头清晰度检测模块、障碍物识别模块、测距模块、3D成像模块、路径状况检测模块、车速检测模块、报警提示模块、车载显示器通讯模块、控制器以及存储器。
所述摄像头采集汽车周围环境图像并出传输至摄像头清晰度检测模块;所述摄像头清晰度检测模块对摄像头采集的环境图像清晰度进行辨别,并控制摄像头对不清晰图像重新采集,将清晰图像传输至控制器、障碍物识别模块、3D成像模块以及路径状况检测模块;所述障碍物识别模块对采集的图像进行辨别分析,识别出汽车附近的障碍物并将识别结果发送至控制器;所述测距模块根据障碍物识别模块的识别结果对汽车与障碍物之间的距离进行测量并将测量结果发送至控制器;所述3D成像模块将采集的图像整合为3D影像并通过车载显示器通讯模块显示出来;所述路径状况检测模块检测出汽车前方道路宽度以及道路附近的坑沟并将宽度数据以及坑沟数据发送至控制器;所述车速检测模块与汽车的时速表电性连接并将汽车速度数据传输至控制器;所述控制器接收摄像头清晰度检测模块、障碍物识别模块、测距模块、路径状况检测模块以及车速检测模块发送的数据,所述控制器将接收数据与存储器中限定的标准数据对比,控制报警提示模块提示障碍物信息、距离信息、车速信息、路面宽度信息以及坑沟信息。
进一步的,所述摄像头至少设有四个,分别固定于汽车车身外部四角。
进一步的,所述控制器为单片机。
进一步的,所述测距模块为超声波测距模块。
进一步的,所述报警提示模块采用语音播报模块进行播报信息,同时发出不同频率报警声提示。
进一步的,所述障碍物信息包括障碍物与汽车的距离以及障碍物大小。
进一步的,所述标准数据包括限定的距离报警数据、障碍物种类报警数据、路面宽度报警数据以及车速报警数据。
本发明与现有技术相比的优点在于:本发明采用多种数据分析模块,详细的检测出汽车附近区域的盲区信息,并通过语音播报提醒,有效的帮助驾驶人员清楚了解视野盲区信息;同时通过车载显示器通讯模块清晰的看到汽车周围情况。
附图说明
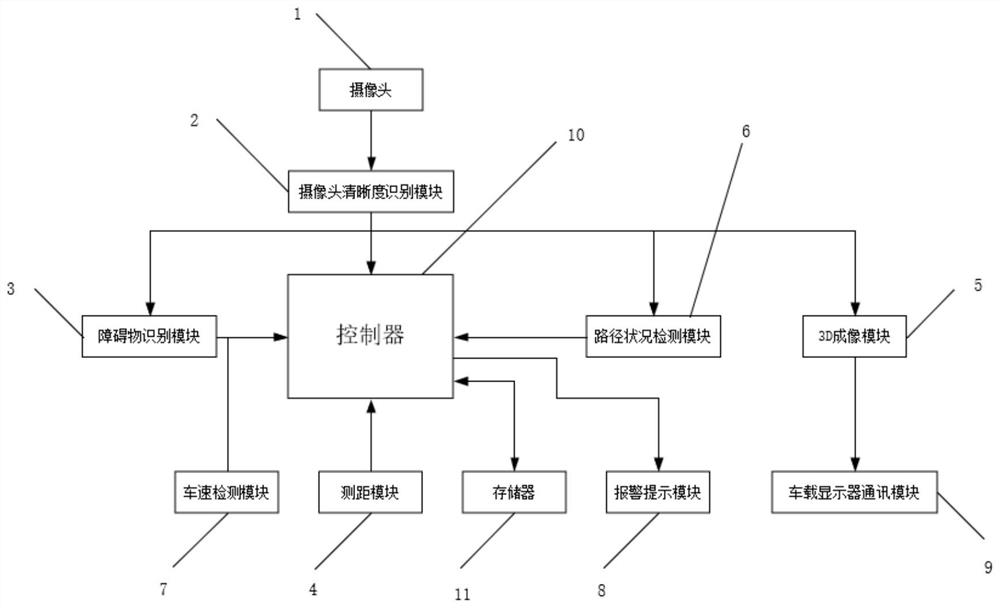
图1是本发明一种汽车启动、倒退和低速行驶时周围视野盲区检测系统的流程图。
如图所示:1、摄像头,2、摄像头清晰度检测模块,3、障碍物识别模块,4、测距模块,5、3D成像模块,6、路径状况检测模块,7、车速检测模块,8、报警提示模块,9、车载显示器通讯模块,10、控制器,11、存储器。
具体实施方式
下面结合附图对本发明一种汽车启动、倒退和低速行驶时周围视野盲区检测系统做进一步的详细说明。
结合附图1,对本发明进行详细介绍。
一种汽车启动、倒退和低速行驶时周围视野盲区检测系统,包括摄像头1、摄像头清晰度检测模块2、障碍物识别模块3、测距模块4、3D成像模块5、路径状况检测模块6、车速检测模块7、报警提示模块8、车载显示器通讯模块9、控制器10以及存储器11。
所述摄像头1采集汽车周围环境图像并出传输至摄像头清晰度检测模块2;所述摄像头清晰度检测模块2对摄像头1采集的环境图像清晰度进行辨别,并控制摄像头1对不清晰图像重新采集,将清晰图像传输至控制器10、障碍物识别模块3、3D成像模块5以及路径状况检测模块6;所述障碍物识别模块3对采集的图像进行辨别分析,识别出汽车附近的障碍物并将识别结果发送至控制器10;所述测距模块4根据障碍物识别模块3的识别结果对汽车与障碍物之间的距离进行测量并将测量结果发送至控制器10;所述3D成像模块5将采集的图像整合为3D影像并通过车载显示器通讯模块9显示出来;所述路径状况检测模块6检测出汽车前方道路宽度以及道路附近的坑沟并将宽度数据以及坑沟数据发送至控制器10;所述车速检测模块7与汽车的时速表电性连接并将汽车速度数据传输至控制器10;所述控制器10接收摄像头清晰度检测模块2、障碍物识别模块3、测距模块4、路径状况检测模块6以及车速检测模块7发送的数据,所述控制器10将接收数据与存储器11中限定的标准数据对比,控制报警提示模块8提示障碍物信息、距离信息、车速信息、路面宽度信息以及坑沟信息。
所述摄像头1至少设有四个,分别固定于汽车车身外部四角。
所述控制器10为单片机。
所述测距模块4为超声波测距模块4。
所述报警提示模块8采用语音播报模块进行播报信息,同时发出不同频率报警声提示。
所述障碍物信息包括障碍物与汽车的距离以及障碍物大小。
所述标准数据包括限定的距离报警数据、障碍物种类报警数据、路面宽度报警数据以及车速报警数据。
本发明一种汽车启动、倒退和低速行驶时周围视野盲区检测系统的具体实施过程如下:
驾驶员启动车辆时打开本系统,系统控制摄像头1采集汽车周围环境图像并出传输至摄像头清晰度检测模块2;摄像头清晰度检测模块2对摄像头1采集的环境图像清晰度进行辨别,将清晰图像传输至控制器10、障碍物识别模块3、3D成像模块5以及路径状况检测模块6;障碍物识别模块3对采集的图像进行辨别分析,识别出汽车附近的障碍物并将识别结果发送至控制器10,控制器10将障碍物数据与存储器11中数据智能对比,若是危险的障碍物则控制报警提示模块8语音播报危险信息;测距模块4根据障碍物识别模块3的识别结果对汽车与障碍物之间的距离进行测量并将测量结果发送至控制器10,控制器10将接收的数据与存储器11中存储的报警距离对比,达到危险距离时语音报警提醒;3D成像模块5将采集的图像整合为3D影像并通过车载显示器通讯模块9显示出来;路径状况检测模块6检测出汽车前方道路宽度并将宽度数据发送至控制器10,控制器10将接收的数据与存储器11存储的数据对比,若是前方道路过窄或会车距离不够则语音播报提醒和发出不同频率报警声提示;驾驶员能够通过车载显示器通讯模块9实时观看汽车盲区的具体情况。
以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
- 一种汽车启动、倒退和低速行驶时周围视野盲区检测系统
- 电动汽车以及用于电动汽车低速行驶时的行人提醒装置