土压平衡盾构的土压智能控制方法及其系统
文献发布时间:2023-06-19 10:36:57
技术领域
本发明涉及盾构施工领域,特指一种土压平衡盾构的土压智能控制方法及其系统。
背景技术
土压平衡盾构是利用挖掘出来的泥土支撑开挖面,无需额外大规模泥水处理设备,因此运用十分广泛,土压平衡盾构施工的核心是保持开挖面稳定,并精确控制地表沉降的幅度。
目前控制土压平衡的主要方法是先根据地质条件、隧道埋深以及人工经验来设置土仓压力,在掘进过程中将土压维持在目标范围内,并根据监测地表沉降数据来调整目标土压,这种控制土压的方法受到操作者经验、能力等主观因素的影响,难以对土压精准控制,难以保证地表沉降在合理范围内,从而可能导致较大的地表变形以及严重的安全事故。
发明内容
本发明的目的在于克服现有技术的缺陷,提供一种土压平衡盾构的土压智能控制方法,解决了控制土压时主观因素影响较大的问题,减少主观因素对土压控制的影响,保证地表沉降在合理范围内,避免较大的地表变形和严重的安全事故。
实现上述目的的技术方案是:
本发明提供了一种土压平衡盾构的土压智能控制方法,包括如下步骤:
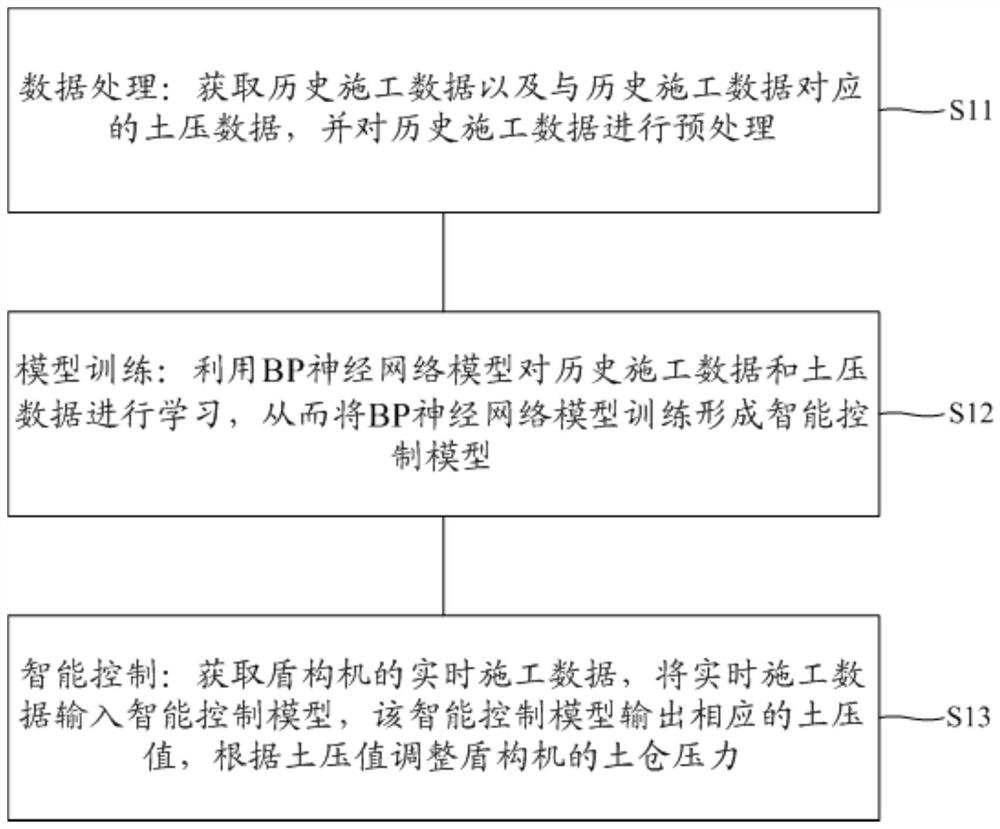
S11.数据处理:获取历史施工数据以及与历史施工数据对应的土压数据,并对历史施工数据进行预处理;
S12.模型训练:利用BP神经网络模型对历史施工数据和土压数据进行学习,从而将BP神经网络模型训练形成智能控制模型;
S13.智能控制:获取盾构机的实时施工数据,将实时施工数据输入智能控制模型,该智能控制模型输出相应的土压值,根据土压值调整盾构机的土仓压力。
本发明提出了一种土压平衡盾构的土压智能控制方法,通过获取历史施工数据和对应土压数据,经处理后形成特征数据,利用BP神经网络模型对特征数据进行学习,从而形成智能控制模型,形成的智能控制模型能够对输入的实时施工数据自动输出对应的土压值,根据该土压值调整盾构机的土仓压力,以减少主观因素对盾构施工的影响,解决了控制土压时主观因素影响较大的问题,减少主观因素对土压控制的影响,保证地表沉降在合理范围内,避免较大的地表变形和严重的安全事故。
本发明土压平衡盾构的土压智能控制方法的进一步改进在于,该历史施工数据和实时施工数据均包括盾构机推进状态下的总推力、盾构机的推进速度、盾构机的螺旋机转速、盾构机的刀盘扭矩、隧道埋深、开挖面前方累积沉降值和开挖面前方目标累积沉降值;
开挖面前方目标累积沉降值根据开挖面前方单次沉降值和开挖面前方累积沉降值确定,该开挖面前方单次沉降值根据盾构机的地表监测数据计算得到,该开挖面前方累积沉降值从盾构机的地表监测数据中获取。
本发明土压平衡盾构的土压智能控制方法及其系统的进一步改进在于,计算开挖面前方单次沉降值时,采用公式如下:
其中,y为待测点与盾构机切口之间的距离,H为隧道埋深,D为盾构直径,S
本发明土压平衡盾构的土压智能控制方法及其系统的进一步改进在于,开挖面前方目标累积沉降值等于开挖面前方累积沉降值加上开挖面前方单次沉降值。
本发明土压平衡盾构的土压智能控制方法的进一步改进在于,历史施工数据预处理时,还包括:
根据历史施工数据的获取频率划分时间段,计算时间段内的历史施工数据和土压数据的平均值,进而BP神经网络模型对历史施工数据的平均值和对应的土压数据的平均值进行学习。
本发明土压平衡盾构的土压智能控制方法的进一步改进在于,将实时施工数据输入智能控制模型前,还包括:
根据盾构机的施工环境确定沉降范围,利用全站仪获取地表沉降数据,当地表沉降数据超出沉降范围时,将实时施工数据输入智能控制模型,并根据智能控制模型输出的土压值对应调整盾构机的土仓压力。
本发明还提供了一种土压平衡盾构的土压智能控制系统,包括:
数据获取模块,以获取盾构机的实时施工数据;
数据处理模块,以对实时施工数据进行预处理;以及
智能控制模型,该智能控制模型由BP神经网络模型对历史施工数据和对应的土压数据学习形成的,以根据经处理的实时施工数据得出对应的土压值。
本发明土压平衡盾构的土压智能控制系统的进一步改进在于,该历史施工数据和实时施工数据均包括盾构机推进状态下的总推力、盾构机的推进速度、盾构机的螺旋机转速、盾构机的刀盘扭矩、隧道埋深、开挖面前方累积沉降值和开挖面前方目标累积沉降值;
开挖面前方目标累积沉降值根据开挖面前方单次沉降值和开挖面前方累积沉降值确定,该开挖面前方单次沉降值根据盾构机的地表监测数据计算得到,该开挖面前方累积沉降值从盾构机的地表监测数据中获取。
本发明土压平衡盾构的土压智能控制系统的进一步改进在于,还包括供计算开挖面前方单次沉降值的计算模块,计算公式如下:
其中,y为待测点与盾构机切口之间的距离,H为隧道埋深,D为盾构直径,S
本发明土压平衡盾构的土压智能控制系统的进一步改进在于,开挖面前方目标累积沉降值等于开挖面前方累积沉降值加上开挖面前方单次沉降值。
附图说明
图1为本发明土压平衡盾构的土压智能控制方法的流程图。
图2为本发明土压平衡盾构的土压智能控制方法中判断是否需要调整土仓压力的流程图。
具体实施方式
下面结合附图和具体实施例对本发明作进一步说明。
本发明提供了一种土压平衡盾构的土压智能控制方法及其系统,通过获取历史施工数据和对应土压数据,经处理后形成特征数据,利用BP神经网络模型对特征数据进行学习,从而形成智能控制模型,形成的智能控制模型能够对输入的实时施工数据自动输出对应的土压值,根据该土压值调整盾构机的土仓压力,以减少主观因素对盾构施工的影响,解决了控制土压时主观因素影响较大的问题,减少主观因素对土压控制的影响,保证地表沉降在合理范围内,避免较大的地表变形和严重的安全事故。下面结合附图对本发明土压平衡盾构的土压智能控制方法及其系统进行说明。
参阅图1为本发明土压平衡盾构的土压智能控制方法的流程图。下面结合图1,对本发明土压平衡盾构的土压智能控制方法及其系统进行说明。
如图1所示,本发明提供了一种土压平衡盾构的土压智能控制方法,包括如下步骤:
执行步骤S11.数据处理:获取历史施工数据以及与历史施工数据对应的土压数据,并对历史施工数据进行预处理;接着执行步骤S12
执行步骤S12.模型训练:利用BP神经网络模型对历史施工数据和土压数据进行学习,从而将BP神经网络模型训练形成智能控制模型;接着执行步骤S13
执行步骤S13.智能控制:获取盾构机的实时施工数据,将实时施工数据输入智能控制模型,该智能控制模型输出相应的土压值,根据土压值调整盾构机的土仓压力。
作为本发明的一较佳实施方式,该历史施工数据和实时施工数据均包括盾构机推进状态下的总推力、盾构机的推进速度、盾构机的螺旋机转速、盾构机的刀盘扭矩、隧道埋深、开挖面前方累积沉降值和开挖面前方目标累积沉降值;
开挖面前方目标累积沉降值根据开挖面前方单次沉降值和开挖面前方累积沉降值确定,该开挖面前方单次沉降值根据盾构机的地表监测数据计算得到,该开挖面前方累积沉降值从盾构机的地表监测数据中获取。
具体的,计算开挖面前方单次沉降值时,采用公式如下:
其中,y为待测点与盾构机切口之间的距离,H为隧道埋深,D为盾构直径,S
具体的,该开挖面前方目标累积沉降值等于开挖面前方累积沉降值加上开挖面前方单次沉降值。
进一步的,历史施工数据预处理时,还包括:
根据历史施工数据的获取频率划分时间段,计算时间段内的历史施工数据和土压数据的平均值,进而BP神经网络模型对历史施工数据的平均值和对应的土压数据的平均值进行学习,由于各历史施工数据自动获取的频率不同因此要对其进行处理,可根据获取频率最长的数据划分时间段,对该时间段中的历史施工数据求平均值,以避免因获取频率不同而导致数据间难以匹配的问题,对实时施工数据也可进行平均处理。
较佳地,盾构推进数据来源于传感器采集到的盾构设备数据,采集频率为1次/秒,地表监测数据来源于人工全站仪测量,测量频率为2次/天,各数据的采集频率不同,因此以地表监测数据的采集频率为主,将地表监测数据前后两次采集作为一个时间段,假设s
进一步的,将实时施工数据输入智能控制模型前,还包括:
根据盾构机的施工环境确定沉降范围,利用全站仪获取地表沉降数据,当地表沉降数据超出沉降范围时,将实时施工数据输入智能控制模型,并根据智能控制模型输出的土压值对应调整盾构机的土仓压力,若地表沉降数据未超出沉降范围时,则可以不调整土仓压力。
较佳地,结合图2所示,首先根据最新地表沉降数据,计算出当前地表沉降最大累计值和最大单次变化量,通过判断最大累计沉降和最大单次变化量是否在合适范围内,确定是否调整土仓压力,首先观察最大累计沉降是否在[-3mm,+5mm]以内,该范围应根据具体项目来设置,如果符合则再观察最大单次变化量是否在合适范围,以[-2,+2]mm为例,如果符合则不用调整,否则调整土仓压力,如果最大累计沉降不在对应的范围内,则再观察最大单次变化量是否向着好的趋势发展,即如果最大累计值大于0,最大单次变化也大于0,这样将使最大累计沉降变得更大,因此需要调整土压;如果单次变化量小于0,使得最大累计值变小,此时则不需要调整土压。
本发明的具体实施方式如下:
获取历史施工数据和对应的土压数据,历史施工数据包括盾构机推进状态下的总推力、盾构机的推进速度、盾构机的螺旋机转速、盾构机的刀盘扭矩、隧道埋深、开挖面前方累积沉降值和开挖面前方目标累积沉降值,其中开挖面前方目标累积沉降值根据开挖面前方单次沉降值和开挖面前方累积沉降值确定,该开挖面前方单次沉降值根据盾构机的地表监测数据计算得到,该开挖面前方累积沉降值从盾构机的地表监测数据中获取;
将上述的历史施工数据进行平均化处理以消除数据获取频率不同的问题,并将平均化后的历史施工数据和对应的土压数据作为特征数据,利用BP神经网络模型对该特征数据进行学习,从而将BP神经网络模型训练形成智能控制模型;
在盾构机掘进时,获取盾构机的实时施工数据,获取的实时施工数据包括盾构机推进状态下的总推力、盾构机的推进速度、盾构机的螺旋机转速、盾构机的刀盘扭矩、隧道埋深、开挖面前方累积沉降值和开挖面前方目标累积沉降值,其中开挖面前方累积沉降值根据开挖面前方单次沉降值确定,该开挖面前方单次沉降值根据盾构机的地表监测数据计算得到;
根据获得的地表沉降数据判断是否超出设置的沉降范围,若未超过,则不需要调整土仓压力,若超过沉降范围,则需要调整土仓压力;
将获取的实时施工数据进行平均化处理,将各项实时施工数据的平均值输入智能控制模型中,模型自动计算得出对应的土压值,施工人员根据土压值调整盾构机的土仓压力,从而能够避免人为因素对施工的影响,保证施工的安全性。
本发明还提供了一种土压平衡盾构的土压智能控制系统,包括:
数据获取模块,以获取盾构机的实时施工数据;
数据处理模块,以对实时施工数据进行预处理;以及
智能控制模型,该智能控制模型由BP神经网络模型对历史施工数据和对应的土压数据学习形成的,以根据经处理的实时施工数据得出对应的土压值。
进一步的,该历史施工数据和实时施工数据均包括盾构机推进状态下的总推力、盾构机的推进速度、盾构机的螺旋机转速、盾构机的刀盘扭矩、隧道埋深、开挖面前方累积沉降值和开挖面前方目标累积沉降值;
开挖面前方目标累积沉降值根据开挖面前方单次沉降值和开挖面前方累积沉降值确定,该开挖面前方单次沉降值根据盾构机的地表监测数据计算得到,该开挖面前方累积沉降值从盾构机的地表监测数据中获取。
进一步的,还包括供计算开挖面前方单次沉降值的计算模块,计算公式如下:
其中,y为待测点与盾构机切口之间的距离,H为隧道埋深,D为盾构直径,S
具体的,该开挖面前方目标累积沉降值等于开挖面前方累积沉降值加上开挖面前方单次沉降值。
以上结合附图实施例对本发明进行了详细说明,本领域中普通技术人员可根据上述说明对本发明做出种种变化例。因而,实施例中的某些细节不应构成对本发明的限定,本发明将以所附权利要求书界定的范围作为本发明的保护范围。
- 土压平衡盾构的土压智能控制方法及其系统
- 基于GRU深度学习的土压平衡盾构土压智能调控方法