一种工程用可移动应急立交桥设备
文献发布时间:2023-06-19 10:41:48
技术领域
本发明涉及一种取样设备,更具体的说是一种工程用可移动应急立交桥设备。
背景技术
在立交桥使用中遇到自然灾害导致立交桥受损不能使用,新建立交桥工期较长,但是市面上没有较好的应急立交桥设备,所以设计了这种工程用可移动应急立交桥设备。
发明内容
本发明主要解决的技术问题是提供一种工程用可移动应急立交桥设备,设备能够展开形成立交桥,设备能够在形成立交桥时将横向轮固定保持设备的相对位置稳定,设备能够横向移动,设备能够纵向移动,设备能够在纵向移动时通过螺旋桨的反作用力助益设备的纵向移动。
为解决上述技术问题,本发明涉及一种取样设备,更具体的说是一种工程用可移动应急立交桥设备,包括收缩机构、横向移动机构、纵向移动机构,设备能够展开形成立交桥,设备能够在形成立交桥时将横向轮固定保持设备的相对位置稳定,设备能够横向移动,设备能够纵向移动,设备能够在纵向移动时通过螺旋桨的反作用力助益设备的纵向移动。
收缩机构与横向移动机构连接,横向移动机构与纵向移动机构连接,纵向移动机构与收缩机构连接。
作为本技术方案的进一步优化,本发明一种工程用可移动应急立交桥设备,所述的收缩机构包括电机、电机轴、皮带a、连接轴a、齿轮a、收缩摩擦轮、齿轮b、连接轴b、铰接板a、铰接板b、铰接板c、铰接限位板a、铰接限位板b、皮带b、连接轴c、皮带c、连接轴d、摩擦轮、连接轴e、连接轴轴承板、正向螺旋桨、反向螺旋桨、连接板a、连接板b、连接板c、连接板d,电机与电机轴连接,电机与连接板c连接,电机轴与皮带a摩擦连接,皮带a与连接轴a摩擦连接,连接轴a与齿轮a连接,连接轴a与连接板b轴承连接,连接轴a与收缩摩擦轮连接,连接轴a与皮带b摩擦连接,连接轴a与连接板c轴承连接,齿轮a与齿轮b相啮合。收缩摩擦轮与连接轴b连接,收缩摩擦轮与铰接板a摩擦连接,收缩摩擦轮与铰接板b摩擦连接,收缩摩擦轮与铰接板c摩擦连接,齿轮b与连接轴b连接,连接轴b与皮带b摩擦连接,连接轴b与连接板b轴承连接,连接轴b与连接板c轴承连接,铰接板a与铰接板b相铰接,铰接板a与铰接板c相铰接,铰接板a与连接板a滑动连接,铰接板c与连接板a滑动连接,铰接限位板b与连接板b连接,铰接限位板b与连接板c连接,皮带b与连接轴c摩擦连接,连接轴c与皮带c摩擦连接,连接轴c与连接板b轴承连接,连接轴c与连接板c轴承连接,皮带c与连接轴d摩擦连接,皮带c与摩擦轮摩擦连接,连接轴d与连接板b轴承连接,连接轴d与连接板c轴承连接,摩擦轮与连接轴e连接,连接轴e与连接轴轴承板轴承连接,一个连接轴e与正向螺旋桨连接另一个连接轴e与反向螺旋桨连接,连接轴轴承板与连接板d连接,连接板a与连接板b连接,连接板a与连接板c连接,连接板b与连接板d连接,连接板c与连接板d连接。
作为本技术方案的进一步优化,本发明一种工程用可移动应急立交桥设备,所述的横向移动机构包括行进电机、行进电机轴、皮带一、连接轴一、前轮、后轮、带轴摩擦轮、滑动板、滑动槽、滑动限位板,行进电机与行进电机轴连接,行进电机与连接板c连接,行进电机轴与皮带一摩擦连接,皮带一与连接轴一摩擦连接,连接轴一与连接板b轴承连接,连接轴一与连接板c轴承连接,一个连接轴一与前轮连接另一个连接轴一与后轮连接,带轴摩擦轮与皮带b摩擦连接,带轴摩擦轮与滑动板摩擦连接,带轴摩擦轮与连接板b轴承连接,带轴摩擦轮与连接板c轴承连接,滑动板与滑动槽滑动连接,滑动板与滑动限位板连接,滑动板与连接板a滑动连接,滑动板与连接板c滑动连接,滑动槽与连接板c连接。
作为本技术方案的进一步优化,本发明一种工程用可移动应急立交桥设备,所述的纵向移动机构包括联动摩擦轮a、联动支撑块、支撑滑动槽、传动轴a、侧向轮a、斜齿轮a、斜齿轮b、联动皮带a、传动轴b、联动皮带限位板、安装板a、联动摩擦轮b、传动轴c、反作用力螺旋桨、安装板b、带轴侧轮,联动摩擦轮a与联动支撑块摩擦连接,联动摩擦轮a与带轴摩擦轮连接,联动支撑块与支撑滑动槽滑动连接,联动支撑块与传动轴a轴承连接,传动轴a与侧向轮a连接,传动轴a与斜齿轮a连接,侧向轮a与连接板b滑动连接,斜齿轮a与斜齿轮b相啮合,斜齿轮b与连接轴一连接,联动皮带a与传动轴b摩擦连接,联动皮带a与联动摩擦轮b摩擦连接,传动轴b与联动皮带限位板连接,传动轴b与安装板a轴承连接,安装板a与连接板b连接,联动摩擦轮b与传动轴c连接,传动轴c与反作用力螺旋桨连接,传动轴c与连接板b轴承连接,安装板b与带轴侧轮轴承连接,安装板b与连接板c连接。
作为本技术方案的进一步优化,本发明一种工程用可移动应急立交桥设备,所述的反作用力螺旋桨材质为碳纤维。
本发明一种工程用可移动应急立交桥设备的有益效果为:
本发明一种工程用可移动应急立交桥设备,设备能够展开形成立交桥,设备能够在形成立交桥时将横向轮固定保持设备的相对位置稳定,设备能够横向移动,设备能够纵向移动,设备能够在纵向移动时通过螺旋桨的反作用力助益设备的纵向移动。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
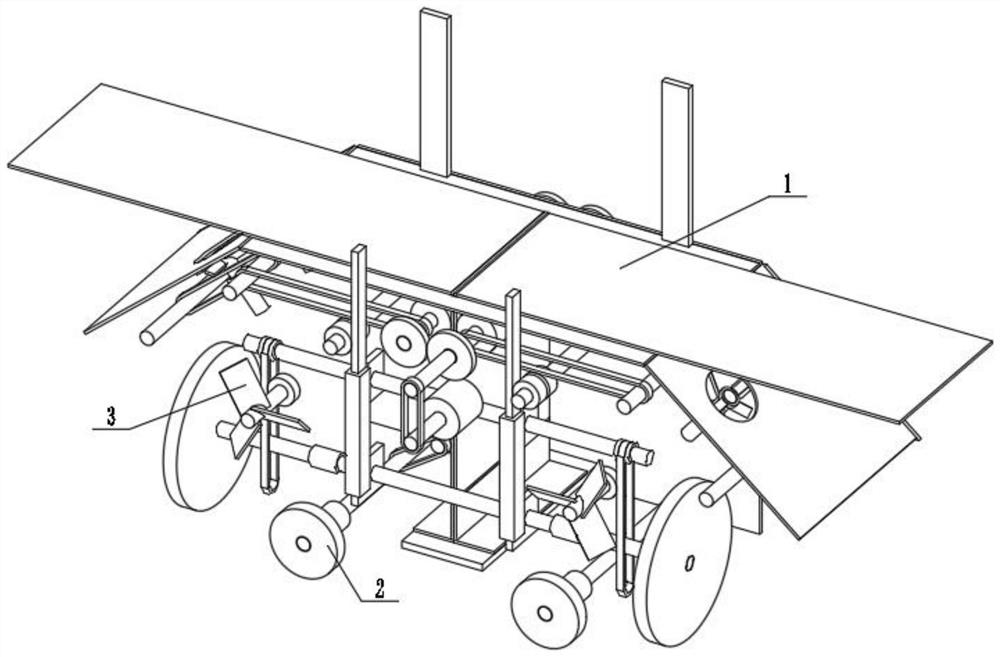
图1为本发明一种工程用可移动应急立交桥设备的结构示意图。
图2为本发明一种工程用可移动应急立交桥设备的的结构示意图。
图3为本发明一种工程用可移动应急立交桥设备的的结构示意图。
图4为本发明一种工程用可移动应急立交桥设备的的结构示意图。
图5为本发明一种工程用可移动应急立交桥设备的的结构示意图。
图6为本发明一种工程用可移动应急立交桥设备的的结构示意图。
图7为本发明一种工程用可移动应急立交桥设备的的结构示意图。
图8为本发明一种工程用可移动应急立交桥设备的的结构示意图。
图9为本发明一种工程用可移动应急立交桥设备的的结构示意图。
图10为本发明一种工程用可移动应急立交桥设备的的结构示意图。
图11为本发明一种工程用可移动应急立交桥设备的的结构示意图。
图12为本发明一种工程用可移动应急立交桥设备的的结构示意图。
图13为本发明一种工程用可移动应急立交桥设备的的结构示意图。
图14为本发明一种工程用可移动应急立交桥设备的的结构示意图。
图15为本发明一种工程用可移动应急立交桥设备的的结构示意图。
图16为本发明一种工程用可移动应急立交桥设备的的结构示意图。
图中:收缩机构1;电机1-1;电机轴1-2;皮带a1-3;连接轴a1-4;齿轮a1-5;收缩摩擦轮1-6;齿轮b1-7;连接轴b1-8;铰接板a1-9;铰接板b1-10;铰接板c1-11;铰接限位板a1-12;铰接限位板b1-13;皮带b1-14;连接轴c1-15;皮带c1-16;连接轴d1-17;摩擦轮1-18;连接轴e1-19;连接轴轴承板1-20;正向螺旋桨1-21;反向螺旋桨1-22;连接板a1-23;连接板b1-24;连接板c1-25;连接板d1-26;横向移动机构2;行进电机2-1;行进电机轴2-2;皮带一2-3;连接轴一2-4;前轮2-5;后轮2-6;带轴摩擦轮2-7;滑动板2-8;滑动槽2-9;滑动限位板2-10;纵向移动机构3;联动摩擦轮a3-1;联动支撑块3-2;支撑滑动槽3-3;传动轴a3-4;侧向轮a3-5;斜齿轮a3-6;斜齿轮b3-7;联动皮带a3-8;传动轴b3-9;联动皮带限位板3-10;安装板a3-11;联动摩擦轮b3-12;传动轴c3-13;反作用力螺旋桨3-14;安装板b3-15;带轴侧轮3-16。
具体实施方式
具体实施方式一:
下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15、图16说明本实施方式,本发明涉及一种取样设备,更具体的说是一种工程用可移动应急立交桥设备,包括收缩机构1、横向移动机构2、纵向移动机构3,设备能够展开形成立交桥,设备能够在形成立交桥时将横向轮固定保持设备的相对位置稳定,设备能够横向移动,设备能够纵向移动,设备能够在纵向移动时通过螺旋桨的反作用力助益设备的纵向移动。
收缩机构1与横向移动机构2连接,横向移动机构2与纵向移动机构3连接,纵向移动机构3与收缩机构1连接。
具体实施方式二:
下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15、图16说明本实施方式,本实施方式对实施方式一作进一步说明,所述的收缩机构1包括电机1-1、电机轴1-2、皮带a1-3、连接轴a1-4、齿轮a1-5、收缩摩擦轮1-6、齿轮b1-7、连接轴b1-8、铰接板a1-9、铰接板b1-10、铰接板c1-11、铰接限位板a1-12、铰接限位板b1-13、皮带b1-14、连接轴c1-15、皮带c1-16、连接轴d1-17、摩擦轮1-18、连接轴e1-19、连接轴轴承板1-20、正向螺旋桨1-21、反向螺旋桨1-22、连接板a1-23、连接板b1-24、连接板c1-25、连接板d1-26,电机1-1与电机轴1-2连接,电机1-1与连接板c1-24连接,电机轴1-2与皮带a1-3摩擦连接,皮带a1-3与连接轴a1-4摩擦连接,连接轴a1-4与齿轮a1-5连接,连接轴a1-4与连接板b1-24轴承连接,连接轴a1-4与收缩摩擦轮1-6连接,连接轴a1-4与皮带b1-14摩擦连接,连接轴a1-4与连接板c1-25轴承连接,齿轮a1-5与齿轮b1-7相啮合。收缩摩擦轮1-6与连接轴b1-8连接,收缩摩擦轮1-6与铰接板a1-9摩擦连接,收缩摩擦轮1-6与铰接板b1-10摩擦连接,收缩摩擦轮1-6与铰接板c1-11摩擦连接,齿轮b1-7与连接轴b1-8连接,连接轴b1-8与皮带b1-14摩擦连接,连接轴b1-8与连接板b1-24轴承连接,连接轴b1-8与连接板c1-25轴承连接,铰接板a1-9与铰接板b1-10相铰接,铰接板a1-9与铰接板c1-11相铰接,铰接板a1-9与连接板a1-23滑动连接,铰接板c1-11与连接板a1-23滑动连接,铰接限位板b1-13与连接板b1-24连接,铰接限位板b1-13与连接板c1-25连接,皮带b1-14与连接轴c1-15摩擦连接,连接轴c1-15与皮带c1-16摩擦连接,连接轴c1-15与连接板b1-24轴承连接,连接轴c1-15与连接板c1-25轴承连接,皮带c1-16与连接轴d1-17摩擦连接,皮带c1-16与摩擦轮1-18摩擦连接,连接轴d1-17与连接板b1-24轴承连接,连接轴d1-17与连接板c1-25轴承连接,摩擦轮1-18与连接轴e1-19连接,连接轴e1-19与连接轴轴承板1-20轴承连接,一个连接轴e1-19与正向螺旋桨1-21连接另一个连接轴e1-19与反向螺旋桨1-22连接,连接轴轴承板1-20与连接板d1-26连接,连接板a1-23与连接板b1-24连接,连接板a1-23与连接板c1-25连接,连接板b1-24与连接板d1-26连接,连接板c1-25与连接板d1-26连接,设备能够展开形成立交桥,电机1-1工作,电机1-1工作带动电机轴1-2顺时针旋转,电机轴1-2旋转通过皮带a1-3带动连接轴a1-4旋转,连接轴a1-4旋转通过齿轮a1-5与齿轮b1-7带动连接轴b1-8反向旋转,在连接轴a1-4与连接轴b1-8同时反向旋转时带动两个收缩摩擦轮1-6旋转,收缩摩擦轮1-6旋转带动铰接板a1-9向上滑动,铰接板a1-9运动带动铰接板b1-10与铰接板c1-11运动,铰接板c1-11运动带动铰接限位板a1-12旋转,当铰接限位板a1-12运动至与同侧的收缩摩擦轮1-6接触时,铰接板a1-9与铰接板b1-10与铰接板c1-11不在运动,此时铰接板a1-9与连接板a1-23接触,铰接板b1-10与连接板d1-26接触,设备展开形成立交桥,在连接轴a1-4与连接轴b1-8旋转时通过皮带b1-14带动连接轴c1-15旋转,连接轴c1-15旋转通过皮带c1-16带动连接轴d1-17旋转,在皮带c1-16跟随运动时带动摩擦轮1-18旋转,两侧的摩擦轮1-18同时反向旋转并带动两侧的连接轴e1-19旋转,两个连接轴e1-19旋转分别带动正向螺旋桨1-21与反向螺旋桨1-22,正向螺旋桨1-21与反向螺旋桨1-22旋转时通过连接板d1-26上的圆孔吸附铰接板b1-10使铰接板b1-10的相对位置稳定。
具体实施方式三:
下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15、图16说明本实施方式,本实施方式对实施方式一作进一步说明,所述的横向移动机构2包括行进电机2-1、行进电机轴2-2、皮带一2-3、连接轴一2-4、前轮2-5、后轮2-6、带轴摩擦轮2-7、滑动板2-8、滑动槽2-9、滑动限位板2-10,行进电机2-1与行进电机轴2-2连接,行进电机2-1与连接板c1-25连接,行进电机轴2-2与皮带一2-3摩擦连接,皮带一2-3与连接轴一2-4摩擦连接,连接轴一2-4与连接板b1-24轴承连接,连接轴一2-4与连接板c1-25轴承连接,一个连接轴一2-4与前轮2-5连接另一个连接轴一2-4与后轮2-6连接,带轴摩擦轮2-7与皮带b1-14摩擦连接,带轴摩擦轮2-7与滑动板2-8摩擦连接,带轴摩擦轮2-7与连接板b1-24轴承连接,带轴摩擦轮2-7与连接板c1-25轴承连接,滑动板2-8与滑动槽2-9滑动连接,滑动板2-8与滑动限位板2-10连接,滑动板2-8与连接板a1-23滑动连接,滑动板2-8与连接板c1-25滑动连接,滑动槽2-9与连接板c1-25连接,设备能够在形成立交桥时将横向轮固定保持设备的相对位置稳定,设备能够横向移动,在设备的展开成立交桥之后电机1-1继续工作,皮带b1-14处于运动状态,皮带b1-14运动带动带轴摩擦轮2-7旋转,带轴摩擦轮2-7旋转带动滑动板2-8在滑动槽2-9的限制下向下运动,当滑动板2-8运动至与两个连接轴一2-4接触时,电机1-1继续工作,滑动板2-8向连接轴一2-4施加一个压力,此时立交桥的横向轮保持设备的相对位置稳定,当立交桥不在展开处于收起的状态时,行进电机2-1工作,行进电机2-1工作带动行进电机轴2-2旋转,行进电机轴2-2旋转通过皮带一2-3带动连接轴一2-4旋转,连接轴一2-4旋转带动前轮2-5旋转,前轮2-5旋转时将设备带动使设备横向移动,后轮2-6作为从动轮在地面上行进。
具体实施方式四:
下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15、图16说明本实施方式,本实施方式对实施方式一作进一步说明,所述的纵向移动机构3包括联动摩擦轮a3-1、联动支撑块3-2、支撑滑动槽3-3、传动轴a3-4、侧向轮a3-5、斜齿轮a3-6、斜齿轮b3-7、联动皮带a3-8、传动轴b3-9、联动皮带限位板3-10、安装板a3-11、联动摩擦轮b3-12、传动轴c3-13、反作用力螺旋桨3-14、安装板b3-15、带轴侧轮3-16,联动摩擦轮a3-1与联动支撑块3-2摩擦连接,联动摩擦轮a3-1与带轴摩擦轮2-7连接,联动支撑块3-2与支撑滑动槽3-3滑动连接,联动支撑块3-2与传动轴a3-4轴承连接,传动轴a3-4与侧向轮a3-5连接,传动轴a3-4与斜齿轮a3-6连接,侧向轮a3-5与连接板b1-24滑动连接,斜齿轮a3-6与斜齿轮b3-7相啮合,斜齿轮b3-7与连接轴一2-4连接,联动皮带a3-8与传动轴b3-9摩擦连接,联动皮带a3-8与联动摩擦轮b3-12摩擦连接,传动轴b3-9与联动皮带限位板3-10连接,传动轴b3-9与安装板a3-11轴承连接,安装板a3-11与连接板b1-24连接,联动摩擦轮b3-12与传动轴c3-13连接,传动轴c3-13与反作用力螺旋桨3-14连接,传动轴c3-13与连接板b1-24轴承连接,安装板b3-15与带轴侧轮3-16轴承连接,安装板b3-15与连接板c1-25连接,设备能够纵向移动,设备能够在纵向移动时通过螺旋桨的反作用力助益设备的纵向移动,在立交桥展开后电机1-1反向带动电机轴1-2旋转,立交桥逐渐收起,当立交桥完全收起时,电机1-1继续旋转,此时收缩摩擦轮1-6与铰接板a1-9摩擦连接失效,带轴摩擦轮2-7与滑动板2-8摩擦连接失效,同时带轴摩擦轮2-7处于旋转状态,带轴摩擦轮2-7旋转带动联动摩擦轮a3-1旋转,联动摩擦轮a3-1旋转带动联动支撑块3-2在支撑滑动槽3-3的限制下向下运动,当联动支撑块3-2运动至连接板b1-24上长跳槽的最下位置,此时联动支撑块3-2运动受限,电机1-1继续旋转,联动支撑块3-2持续受到一个向下的力,此过程中联动支撑块3-2运动带动传动轴a3-4运动,传动轴a3-4运动带动侧向轮a3-5运动,侧向轮a3-5运动的过程中侧向轮a3-5逐渐将设备支撑起来,顶一个通过带轴侧轮3-16支撑,传动轴a3-4运动至下侧的极限位置时,传动轴a3-4上的斜齿轮a3-6与斜齿轮b3-7相啮合,此时行进电机2-1工作,行进电机2-1工作带动行进电机轴2-2旋转,行进电机轴2-2旋转通过皮带一2-3带动连接轴一2-4旋转,连接轴一2-4旋转带动斜齿轮b3-7旋转,斜齿轮b3-7旋转通过斜齿轮a3-6带动传动轴a3-4旋转,传动轴a3-4旋转带动侧向轮a3-5旋转,侧向轮a3-5旋转带动设备纵向移动,带轴侧轮3-16作为从动轮在地面上行进,在传动轴a3-4运动至下侧的极限位置时,传动轴a3-4与联动皮带a3-8反生摩擦连接关系,此时传动轴a3-4旋转通过联动皮带a3-8带动传动轴b3-9旋转,联动皮带a3-8跟随运动时带动联动摩擦轮b3-12旋转,联动摩擦轮b3-12旋转通过传动轴c3-13带动反作用力螺旋桨3-14旋转,反作用力螺旋桨3-14旋转时向设备施加一个推力助益了设备的纵向移动。
具体实施方式五:
下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15、图16说明本实施方式,本实施方式对实施方式一作进一步说明,所述的反作用力螺旋桨3-14材质为碳纤维。
本设备的工作原理是:设备能够展开形成立交桥,电机1-1工作,电机1-1工作带动电机轴1-2顺时针旋转,电机轴1-2旋转通过皮带a1-3带动连接轴a1-4旋转,连接轴a1-4旋转通过齿轮a1-5与齿轮b1-7带动连接轴b1-8反向旋转,在连接轴a1-4与连接轴b1-8同时反向旋转时带动两个收缩摩擦轮1-6旋转,收缩摩擦轮1-6旋转带动铰接板a1-9向上滑动,铰接板a1-9运动带动铰接板b1-10与铰接板c1-11运动,铰接板c1-11运动带动铰接限位板a1-12旋转,当铰接限位板a1-12运动至与同侧的收缩摩擦轮1-6接触时,铰接板a1-9与铰接板b1-10与铰接板c1-11不在运动,此时铰接板a1-9与连接板a1-23接触,铰接板b1-10与连接板d1-26接触,设备展开形成立交桥,在连接轴a1-4与连接轴b1-8旋转时通过皮带b1-14带动连接轴c1-15旋转,连接轴c1-15旋转通过皮带c1-16带动连接轴d1-17旋转,在皮带c1-16跟随运动时带动摩擦轮1-18旋转,两侧的摩擦轮1-18同时反向旋转并带动两侧的连接轴e1-19旋转,两个连接轴e1-19旋转分别带动正向螺旋桨1-21与反向螺旋桨1-22,正向螺旋桨1-21与反向螺旋桨1-22旋转时通过连接板d1-26上的圆孔吸附铰接板b1-10使铰接板b1-10的相对位置稳定,设备能够在形成立交桥时将横向轮固定保持设备的相对位置稳定,设备能够横向移动,在设备的展开成立交桥之后电机1-1继续工作,皮带b1-14处于运动状态,皮带b1-14运动带动带轴摩擦轮2-7旋转,带轴摩擦轮2-7旋转带动滑动板2-8在滑动槽2-9的限制下向下运动,当滑动板2-8运动至与两个连接轴一2-4接触时,电机1-1继续工作,滑动板2-8向连接轴一2-4施加一个压力,此时立交桥的横向轮保持设备的相对位置稳定,当立交桥不在展开处于收起的状态时,行进电机2-1工作,行进电机2-1工作带动行进电机轴2-2旋转,行进电机轴2-2旋转通过皮带一2-3带动连接轴一2-4旋转,连接轴一2-4旋转带动前轮2-5旋转,前轮2-5旋转时将设备带动使设备横向移动,后轮2-6作为从动轮在地面上行进,设备能够纵向移动,设备能够在纵向移动时通过螺旋桨的反作用力助益设备的纵向移动,在立交桥展开后电机1-1反向带动电机轴1-2旋转,立交桥逐渐收起,当立交桥完全收起时,电机1-1继续旋转,此时收缩摩擦轮1-6与铰接板a1-9摩擦连接失效,带轴摩擦轮2-7与滑动板2-8摩擦连接失效,同时带轴摩擦轮2-7处于旋转状态,带轴摩擦轮2-7旋转带动联动摩擦轮a3-1旋转,联动摩擦轮a3-1旋转带动联动支撑块3-2在支撑滑动槽3-3的限制下向下运动,当联动支撑块3-2运动至连接板b1-24上长跳槽的最下位置,此时联动支撑块3-2运动受限,电机1-1继续旋转,联动支撑块3-2持续受到一个向下的力,此过程中联动支撑块3-2运动带动传动轴a3-4运动,传动轴a3-4运动带动侧向轮a3-5运动,侧向轮a3-5运动的过程中侧向轮a3-5逐渐将设备支撑起来,顶一个通过带轴侧轮3-16支撑,传动轴a3-4运动至下侧的极限位置时,传动轴a3-4上的斜齿轮a3-6与斜齿轮b3-7相啮合,此时行进电机2-1工作,行进电机2-1工作带动行进电机轴2-2旋转,行进电机轴2-2旋转通过皮带一2-3带动连接轴一2-4旋转,连接轴一2-4旋转带动斜齿轮b3-7旋转,斜齿轮b3-7旋转通过斜齿轮a3-6带动传动轴a3-4旋转,传动轴a3-4旋转带动侧向轮a3-5旋转,侧向轮a3-5旋转带动设备纵向移动,带轴侧轮3-16作为从动轮在地面上行进,在传动轴a3-4运动至下侧的极限位置时,传动轴a3-4与联动皮带a3-8反生摩擦连接关系,此时传动轴a3-4旋转通过联动皮带a3-8带动传动轴b3-9旋转,联动皮带a3-8跟随运动时带动联动摩擦轮b3-12旋转,联动摩擦轮b3-12旋转通过传动轴c3-13带动反作用力螺旋桨3-14旋转,反作用力螺旋桨3-14旋转时向设备施加一个推力助益了设备的纵向移动。
当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
- 一种工程用可移动应急立交桥设备
- 一种通信工程用便于移动的应急通信装置