尾桨集流环及其控制方法和直升机
文献发布时间:2023-06-19 10:46:31
技术领域
本发明属于直升机防除冰技术领域,涉及一种直升机尾桨集流环及其控制方法和直升机。
背景技术
常规直升机尾桨集流环随着直升机尾桨的旋转而旋转,无论在尾桨叶防除冰工作状态还是非工作状态,集流环内部导电环与电刷均为接触状态,在集流环完整的寿命期中,非工作状态占了很大比例。同时由于尾桨旋转速度高,导致电刷空磨损较快,降低了集流环的传输性能,需定期检查磨损量及翻修更换,增加了保障难度。为解决直升机尾桨集流环电刷磨损较快、传输性能下降及检查拆装频繁问题,需要设计一种直升机尾桨集流环。
发明内容
本发明的目的是:提供一种直升机尾桨集流环,能够解决直升机尾桨集流环电刷磨损较快、传输性能下降及检查拆装频繁问题。
另外,本发明还提供所述直升机尾桨集流环的控制方法。
并且,本发明还保护一种采用上述尾桨集流环的直升机。
本发明的技术方案是:一种直升机尾桨集流环及其控制方法和直升机,其包括步进电机1、蜗轮蜗杆机构2、控制板3、凸轮机构4、导线5、电刷盒外罩6、电刷组件8、导电环组件9、外罩10及动子组件11,其中,所述步进电机1、蜗轮蜗杆机构2、控制板3、凸轮机构4均安装在电刷盒外罩6内,步进电机1与蜗轮蜗杆机构2啮合连接,蜗轮蜗杆机构2与凸轮机构4连动,所述控制板3通过导线与电刷组件连接,对电刷组件8与导电环组件9之间的接触压降进行诊断及调整,其中,电刷组件8主体位于电刷盒外罩内,其电刷丝伸出电刷盒外罩与位于外罩10内的导电环组件9连接,所述导电环组件9与动子组件11连接为一体,其中,动子组件11安装在直升机尾桨毂上,并与直升机尾桨电缆连接,相对外罩10和电刷盒外罩6旋转,所述导线5用于电刷组件内部器件之间的电连接。
所述电刷盒外罩6外设置有插座7,该插座7接收防除冰信号及电源,防除冰信号和电源通过导线5、电刷组件8、导电环组件9及动子组件11上的插座传导至尾桨叶,实现尾桨集流环传输信号和电源功能。
所述电刷组件8包括接线端子、刷丝、电刷架,其中,所述电刷架为框架结构,刷丝设置在接线端子上,接线端子位于电刷架两侧,且刷丝与导电环组件9连接。
所述蜗轮蜗杆机构2包括蜗杆12和蜗轮13,其中,蜗杆与步进电机输出轴啮合,蜗轮12和凸轮机构4连接。
所述凸轮机构4包括弹簧14、凸轮16与摆杆18,安装在电刷架15上,其中,摆杆18为对称的一组,分别设置在电刷架两端,并通过弹簧14搭接在凸轮16上方,所述电刷组件的接线端子固定在摆杆上,通过凸轮16的转动控制摆杆的摆动。
所述的电刷组件为对称布置,分布在导电环组件两测,凸轮机构4摆动时,电刷与导电环及控制电路形成回路。
所述的电刷组件中电刷采用的是刷丝束结构,单根刷丝直径Φ0.5mm,材料为AuNi9,共13根刷丝。
一种直升机尾桨集流环控制方法,通过控制板3接收防除冰信号传递至步进电机1,步进电机1驱动蜗轮蜗杆机构2、凸轮机构4运动,控制作为定子的电刷组件8与作为动子的导电环组件9的接触状态,实现除冰工作与非除冰工作时的切换。
直升机尾桨叶需要防除冰工作时,控制板3接收防除冰信号控制步进电机1驱动蜗轮蜗杆机构2、凸轮机构4及电刷组件8对电刷组件8与导电环组件9的接触状态进行诊断及调整,通过安装于电刷盒外罩6上的插座7接收防除冰信号及电源,防除冰信号和电源通过导线5、电刷组件8、导电环组件9及动子组件11上的插座传导至尾桨叶,实现尾桨集流环传输信号和电源功能;直升机尾桨叶不需要防除冰工作时,控制板3控制步进电机1驱动蜗轮蜗杆机构2与凸轮机构4使电刷组件8与导电环组件9分离,实现尾桨集流环待机状态。所述电刷组件8与导电环组件9的接触状态有两种状态:防除冰工作时的接触状态,和非工作状态时的非接触状态。非工作状态时,电刷和导电环分离,减少电刷磨损。
所述控制板3接收防除冰信号通过驱动步进电机1促使电刷组件8与导电环组件9接触,同时提供恒流源将同一个导电环配套电刷形成导通回路,采集回路接触电压降转换为接触电阻判断电刷与导电环的接触状态。
所述控制板3控制电刷组件8与导电环组件9的接触状态的自诊断及调整是将接触压力转换为接触电阻作为依据进行的,若大于电阻要求范围,则控制板3自动驱动步进电机1加大电刷组件8与导电环组件9的接触压力直至接触电阻满足要求。
所述的接触状态接触良好的判断标准为接触电阻达到0.1±0.015Ω。
所述的防除冰不工作时非接触状态的判断标准为接触电阻达到无穷大,实现集流环待机状态。
另外,本发明还提供一种直升机,该直升机尾桨上采用上述直升机尾桨集流环。
本发明具有的优点和有益效果是:本发明采用了机电结合的方式对集流环中的电刷及导电环接触状态进行控制,实施自诊断及调整,提高了尾桨集流环使用寿命、减少了尾桨集流环检查拆装次数,提高了尾桨集流环的传输性能。
附图说明
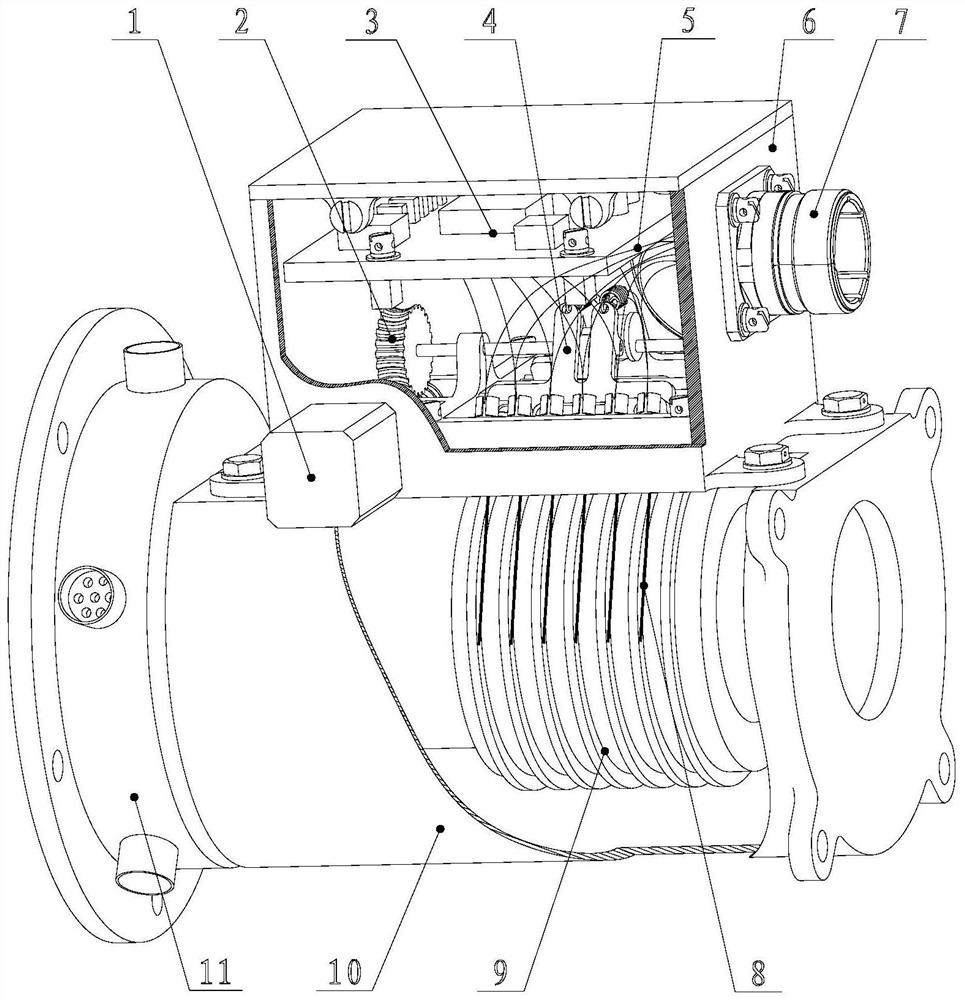
图1为本发明轴测图
图2为本发明内部机械运动结构图
具体实施方式
下面结合附图对本发明进一步说明:
如图1所示,本发明直升机尾桨集流环包括步进电机1、蜗轮蜗杆机构2、控制板3、凸轮机构4、导线5、电刷盒外罩6、电刷组件8、导电环组件9、外罩10及动子组件11,其中,所述步进电机1、蜗轮蜗杆机构2、控制板3、凸轮机构4均安装在电刷盒外罩6内,步进电机1与蜗轮蜗杆机构2啮合连接,蜗轮蜗杆机构2与凸轮机构4连动,所述控制板3通过导线与电刷组件连接,对电刷组件8与导电环组件9之间的接触压降进行诊断及调整,其中,电刷组件8主体位于电刷盒外罩内,其电刷丝伸出电刷盒外罩与位于外罩10内的导电环组件9连接,所述导电环组件9与动子组件11连接为一体,其中,动子组件11安装在直升机尾桨毂上,并与直升机尾桨电缆连接,相对外罩10和电刷盒外罩6旋转,所述导线5用于电刷组件内部器件之间的电连接。
所述电刷盒外罩6外设置有插座7,该插座7接收防除冰信号及电源,防除冰信号和电源通过导线5、电刷组件8、导电环组件9及动子组件11上的插座传导至尾桨叶,实现了对尾桨叶的除冰功能。
所述电刷组件8包括接线端子、刷丝、电刷架,其中,所述电刷架为框架结构,刷丝设置在接线端子上,接线端子位于电刷架两侧,且刷丝与导电环组件9连接。通过刷丝与导电环的接触,实现信号和电源的稳定传输。
所述蜗轮蜗杆机构2包括蜗杆12和蜗轮13,其中,蜗杆与步进电机输出轴啮合,蜗轮12和凸轮机构连接。此蜗杆具有较强的自锁功能。
所述凸轮机构4包括弹簧14、凸轮16与摆杆18,安装在电刷架15上,其中,摆杆18为对称的一组,分别设置在电刷架两端,并通过弹簧14搭接在凸轮16上方,所述电刷组件的接线端子固定在摆杆上,通过凸轮16的转动控制摆杆的摆动。
所述的电刷组件为对称布置,分布在导电环组件两测,凸轮机构4摆动时,电刷与导电环及控制电路形成回路。
所述的电刷组件中电刷采用的是刷丝束结构,单根刷丝直径Φ0.5mm,材料为AuNi9,共13根刷丝。此金合金电刷接触电阻低、耐腐蚀、不易氧化。
一种直升机尾桨集流环控制方法,通过控制板3接收防除冰信号传递至步进电机1,步进电机1驱动蜗轮蜗杆机构2、凸轮机构4运动,控制作为定子的电刷组件8与作为动子的导电环组件9的接触状态,实现除冰工作与非除冰工作时的切换。
直升机尾桨叶需要防除冰工作时,,控制板3接收防除冰信号控制步进电机1驱动蜗轮蜗杆机构2、凸轮机构4及电刷组件8对电刷组件8与导电环组件9的接触状态进行诊断及调整,通过安装于电刷盒外罩6上的插座7接收防除冰信号及电源,防除冰信号和电源通过导线5、电刷组件8、导电环组件9及动子组件11上的插座传导至尾桨叶,实现尾桨集流环传输信号和电源功能;直升机尾桨叶不需要防除冰工作时,控制板3控制步进电机1驱动蜗轮蜗杆机构2与凸轮机构4使电刷组件8与导电环组件9分离,实现尾桨集流环待机状态。工作状态时,电刷和导电环接触,实现除冰功能;非工作状态时,电刷和导电环分离,减少电刷磨损。
所述控制板3接收防除冰信号通过驱动步进电机1促使电刷组件8与导电环组件9接触,同时提供恒流源将同一个导电环配套电刷形成导通回路,采集回路接触电压降转换为接触电阻判断电刷与导电环的接触状态。
所述控制板3控制电刷组件8与导电环组件9的接触状态的自诊断及调整是将接触压力转换为接触电阻作为依据进行的,若大于电阻要求范围,则控制板3自动驱动步进电机1加大电刷组件8与导电环组件9的接触压力直至接触电阻满足要求。
所述的接触状态接触良好的判断标准为接触电阻达到0.1±0.015Ω。
所述的防除冰不工作时非接触状态的判断标准为接触电阻达到无穷大,实现集流环待机状态。
综上所述本发明采用了机电结合的方式对集流环中的电刷及导电环接触状态进行控制,实施自诊断及调整,可以根据是否除冰需要进行接触连接,避免了电刷组件处于长时间接触工作状态,有效提高了尾桨集流环使用寿命、减少了尾桨集流环检查拆装次数,提高了尾桨集流环的传输性能。另外,本发明还提供一种直升机,该直升机尾桨上采用上述直升机尾桨集流环。
- 尾桨集流环及其控制方法和直升机
- 直升机的尾桨驱动系统及其控制方法、直升机