一种无人机抓取装置
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及无人机技术领域,具体为一种无人机抓取装置。
背景技术
无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,无人机可分为军用与民用领域,而在民用方面,无人机的发展较为迅速,且随着成本降低,越来越多的人都能使用无人机,而使用无人机实现各类如送快递、取外卖、拿快递等操作。
但现有的民用无人机拿取方式大多需要人工帮助,如拿快递时,需要旁人将快递与无人机捆绑,之后无人机才能进行运输,但对于放入快递柜内的快递,无人机并不能实现自动抓取,而运输快递时,因快递自身重量不定,较为容易影响无人机的飞行,进而对无人机造成倾斜,甚至翻转,从而造成无人机坠毁。
发明内容
本发明提供的一种无人机抓取装置,具备能自动于快递柜内抓取快递及能通过移动快递位置,从而对无人机达到平衡状态,解决了无人机无法从快递柜拿取快递及不能维持较好的平衡的飞行状态的缺点。
本发明提供如下技术方案:一种无人机抓取装置,包括用于安装在无人机底部的连接件,所述连接件内贯通有通腔,所述通腔内前后两侧对称且滑动设有滑动块,前后两侧所述滑动块能相对运动,所述滑动块内滑动设有夹持杆,所述夹持杆内左端设有检测机构,当所述夹持杆内左端伸入快递柜内后,继续滑动至所述检测机构与快递柜内最深处相抵,进而能开始夹紧工作,前后两侧所述夹持杆内相邻一端面均设有夹持机构,所述检测机构能启动所述夹持机构,进而能将快递进行夹紧后从快递柜内取出,所述滑动块左端面固定设有承重杆,所述承重杆内远离所述连接件一端设有承重机构,所述承重机构能与快递柜内下壁相抵,进而能维持无人机中心的稳定。
精选的,所述滑动块内位于所述夹持杆上侧开设有连接腔,所述连接腔内远离所述通腔内中心一端固定设有转动电机,所述转动电机靠近所述通腔内中心一端动力连接有转轴,所述转轴靠近所述通腔内中心一端延伸至相邻的所述连接腔内固定设有直齿轮,所述直齿轮外圆面与相对应的所述夹持杆上端面螺纹连接,当所述直齿轮转动时,能带动所述夹持杆滑动。
精选的,所述夹持杆内左端两侧对称且开设有滑动腔,所述滑动腔内滑动设有压动块杆,两侧所述压动块杆左端延伸至所述夹持杆左侧且固定设有压动块,所述压动块左端能与快递柜内左壁相抵,所述压动块杆右端面与所述滑动腔内右壁之间固定设有环形弹簧,所述压动块内右端面与所述夹持杆左端面之间分别开设有触点开关腔,所述触点开关腔内固定设有触点开关。
精选的,前后两侧所述夹持杆相邻一端面均固定连接有感应板,当两侧所述触点开关相抵时,能启动两侧所述感应板工作,当两侧所述感应板受到的挤压力大于设定值时能启动转动电机。
精选的,后侧所述承重杆内开设有收纳腔,所述收纳腔内左右两壁之间转动设有转动轴,所述转动轴外圆面绕设有网状布,所述网状布远离所述转动轴一端与前侧所述承重杆后端面固定连接,所述转动轴外圆面一侧固定设有扭簧板,所述扭簧板远离所述网状布一端面与所述收纳腔远离所述网状布一侧内壁之间固定设有扭簧,当前后两侧所述相互远离时,所述网状布位于两侧所述承重杆之间的面积增大,进而能对快递进行承托,所述扭簧能通过自身扭转力带动网状布复位。
精选的,所述承重杆上端面阵列且固定设有连接块,所述连接块上端面与所述夹持杆下端面滑动连接,所述连接件内且位于所述通腔后侧固定设有滑动电机,所述滑动电机前端动力连接有动力轴,所述动力轴前端向前延伸至所述通腔内与所述滑动块内下端螺纹连接,当左右两侧所述触点开关相抵时,能启动所述滑动电机进行工作,进而能带动所述夹持杆相互靠拢,进而开始夹持工作。
精选的,所述承重杆内左侧下端左右两侧对称且开设有滑腔,所述滑腔内滑动设有固定杆,所述固定杆上端面与所述滑腔内上壁之间固定设有压缩弹簧,所述固定杆下端固定设有承重块,所述承重杆内下端且位于左右两侧所述固定杆之间固定设有距离感应器,所述距离感应器能感应其与所述承重块之间的距离,当所述距离感应器与所述承重块之间距离变小时,能启动所述转动电机,进而带动所述夹持杆向右滑动,从而能调整所述连接件的平衡。
本发明具备以下有益效果:
1、本发明通过夹持杆能进入快递柜内,进而对快递进行夹取工作,之后夹持杆的滑动带动快递移动出快递柜,从而完成从快递柜内拿取快递的工作,机械结构简单,夹持稳定。
2、本发明通过承重杆与快递柜内底壁相抵,进而防止将快递拿出快递柜时,快递自身较重,从而带动无人机发生倾斜甚至翻转,进而发生事故,之后通过承重机构,控制夹持杆滑动,进而带动快递调整无人机的重心,进而保证无人机在飞行过程中保持平衡。
附图说明
下面结合附图和实施例对本发明进一步说明。
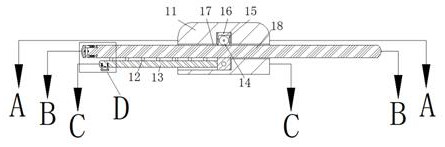
图1为本发明的结构示意图;
图2为图1中A-A处结构示意图;
图3为图1中B-B处结构示意图;
图4为图1中C-C处结构示意图;
图5为图1中D处放大示意图;
图6为图2中E处放大示意图;
图7为图3中F处放大示意图;
图8为图4中G处放大示意图。
图中:11、连接件;12、连接块;13、承重杆;14、直齿轮;15、连接腔;16、滑动块;17、通腔;18、夹持杆;19、滑动电机;20、动力轴;21、环形弹簧;22、触点开关腔;23、触点开关;24、压动块;25、压缩弹簧;26、承重块;27、距离感应器;28、固定杆;29、滑腔;31、滑动腔;32、压动块杆;33、转轴;34、转动电机;35、感应板;39、收纳腔;40、转动轴;41、网状布;42、扭簧;43、扭簧板。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-8,一种无人机抓取装置,包括用于安装在无人机底部的连接件11,所述连接件11内贯通有通腔17,所述通腔17内前后两侧对称且滑动设有滑动块16,前后两侧所述滑动块16能相对运动,所述滑动块16内滑动设有夹持杆18,所述夹持杆18内左端设有检测机构,当所述夹持杆18内左端伸入快递柜内后,继续滑动至所述检测机构与快递柜内最深处相抵,进而能开始夹紧工作,前后两侧所述夹持杆18内相邻一端面均设有夹持机构,所述检测机构能启动所述夹持机构,进而能将快递进行夹紧后从快递柜内取出,所述滑动块16左端面固定设有承重杆13,所述承重杆13内远离所述连接件11一端设有承重机构,所述承重机构能与快递柜内下壁相抵,进而能维持无人机中心的稳定。
其中,所述滑动块16内位于所述夹持杆18上侧开设有连接腔15,所述连接腔15内远离所述通腔17内中心一端固定设有转动电机34,所述转动电机34靠近所述通腔17内中心一端动力连接有转轴33,所述转轴33靠近所述通腔17内中心一端延伸至相邻的所述连接腔15内固定设有直齿轮14,所述直齿轮14外圆面与相对应的所述夹持杆18上端面螺纹连接,当所述直齿轮14转动时,能带动所述夹持杆18滑动。
其中,所述夹持杆18内左端两侧对称且开设有滑动腔31,所述滑动腔31内滑动设有压动块杆32,两侧所述压动块杆32左端延伸至所述夹持杆18左侧且固定设有压动块24,所述压动块24左端能与快递柜内左壁相抵,所述压动块杆32右端面与所述滑动腔31内右壁之间固定设有环形弹簧21,所述压动块24内右端面与所述夹持杆18左端面之间分别开设有触点开关腔22,所述触点开关腔22内固定设有触点开关23。
其中,前后两侧所述夹持杆18相邻一端面均固定连接有感应板35,当两侧所述触点开关23相抵时,能启动两侧所述感应板35工作,当两侧所述感应板35受到的挤压力大于设定值时能启动转动电机34。
其中,后侧所述承重杆13内开设有收纳腔39,所述收纳腔39内左右两壁之间转动设有转动轴40,所述转动轴40外圆面绕设有网状布41,所述网状布41远离所述转动轴40一端与前侧所述承重杆13后端面固定连接,所述转动轴40外圆面一侧固定设有扭簧板43,所述扭簧板43远离所述网状布41一端面与所述收纳腔39远离所述网状布41一侧内壁之间固定设有扭簧42,当前后两侧所述13相互远离时,所述网状布41位于两侧所述承重杆13之间的面积增大,进而能对快递进行承托,所述扭簧42能通过自身扭转力带动网状布41复位。
其中,所述承重杆13上端面阵列且固定设有连接块12,所述连接块12上端面与所述夹持杆18下端面滑动连接,所述连接件11内且位于所述通腔17后侧固定设有滑动电机19,所述滑动电机19前端动力连接有动力轴20,所述动力轴20前端向前延伸至所述通腔17内与所述滑动块16内下端螺纹连接,当左右两侧所述触点开关23相抵时,能启动所述滑动电机19进行工作,进而能带动所述夹持杆18相互靠拢,进而开始夹持工作。
其中,所述承重杆13内左侧下端左右两侧对称且开设有滑腔29,所述滑腔29内滑动设有固定杆28,所述固定杆28上端面与所述滑腔29内上壁之间固定设有压缩弹簧25,所述固定杆28下端固定设有承重块26,所述承重杆13内下端且位于左右两侧所述固定杆28之间固定设有距离感应器27,所述距离感应器27能感应其与所述承重块26之间的距离,当所述距离感应器27与所述承重块26之间距离变小时,能启动所述转动电机34,进而带动所述夹持杆18向右滑动,从而能调整所述连接件11的平衡。
工作原理:连接件11上端面与无人机相连接,进而通过无人机带动连接件11飞向快递柜的位置,当快递柜门打开时,通过使用者控制无人机移动,进而通过连接件11带动承重杆13能带动快递柜门向外打开,无人机调整空中位置,进而通过承重杆13带动承重块26下端面与快递柜内下壁相抵,进而滑动电机19启动,带动动力轴20转动,动力轴20通过螺纹连接带动相互靠拢的前后两侧滑动块16相对运动,分别向通腔17内前后两侧移动,滑动块16能带动夹持杆18移动至与快递柜内壁相抵,此时两侧滑动块16通过固定连接分别带动两侧承重杆13同时移动,前侧承重杆13通过固定连接带动网状布41一端向前滑动,后侧承重杆13带动网状布41另一端向后移动,从而带动网状布41于两侧承重杆13之间的面积增大,进而能更好的承托快递,之后启动转动电机34,转动电机34带动转轴33转动,转轴33通过固定连接带动直齿轮14转动,进而直齿轮14通过齿轮啮合带动夹持杆18向快递柜内移动,夹持杆18带动压动块24滑动至与快递柜内左壁相抵,进而通过压动块24带动压动块杆32滑动进入滑动腔31内;
与此同时,压动块24带动左侧触点开关23移动至与右侧触点开关23相抵,进而启动同时启动感应板35及滑动电机19,滑动电机19反转带动动力轴20反转,进而带动前后两侧滑动块16滑动,进而带动前后两侧夹持杆18相互靠拢,此时感应板35远离夹持杆18一端面与快递相接触,进而于靠拢过程中,对快递进行夹持,当感应板35感应挤压力大于设定值时,滑动电机19停止工作,
转动电机34启动,带动转轴33反转,进而通过固定连接带动直齿轮14反转,进而通过螺纹连接带动夹持杆18向右滑动,两侧夹持杆18带动快递向靠近无人机方向移动,当移动至快递一端位于空中时,转动电机34停止,此时快递自身重量施加于夹持杆18上,进而通过连接块12施加于承重杆13上,此时快递的重量带动承重杆13向下移动,进而带动固定杆28进入滑腔29内,承重块26与距离感应器27之间的距离变小,从而通过距离感应器27启动转动电机34,转动电机34反转,通过夹持带动快递向右滑动至快递柜外侧,当夹持杆18带动快递向右滑动至连接件11平衡处时,压缩弹簧25通过自身弹性能带动承重杆13向上滑动,此时承重块26与距离感应器27之间的距离变大,之后转动电机34停止,无人机向外移动,从而带动承重杆13与快递柜脱离连接,通过控制无人机将快递柜门关上后,无人机向使用者方向飞去,从而完成快递的拿取及运输工作。
上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此领域技术的人士能够了解本发明内容并加以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围内。
- 一种便于更换抓取夹板的无人机抓取装置
- 一种基于无人机的自适应拉线式抓取机构及抓取方法