图像处理电路和安防机器人
文献发布时间:2023-06-19 11:14:36
技术领域
本申请涉及图像处理技术领域,特别是涉及一种图像处理电路和安防机器人。
背景技术
随着科技水平的发展,越来越多的人工劳动被机器人所替代。由于机器人在成本、安全性和可靠性等方面具备突出优势,因此其也被应用在生活和生产活动中的方方面面。安防机器人作为其中一个分支,是指自主、半自主或在工作人员的完全控制下完成安全防护工作的机器人,用于对厂区、高新园区和商场等地进行巡检。为实现环境检测,安防机器人中一般设有图像处理电路。
然而,发明人发现传统技术中至少存在如下问题:传统的图像处理电路存在处理效率低的问题。
发明内容
基于此,有必要针对上述技术问题,提供一种能够提高图像处理效率的图像处理电路和安防机器人。
为实现上述目的,一方面,本申请实施例提供了一种图像处理电路,包括均与机器人机身内的图像处理模块和算力芯片,以及设于机器人底盘内的控制模块,图像处理模块分别连接算力芯片和控制模块。其中,图像处理模块用于对获取到的环境图像数据进行预处理,并输出预处理后的环境图像数据;算力芯片用于采用图像识别算法对预处理后的环境图像数据进行识别,并输出障碍物识别结果;图像处理模块还用于根据环境图像数据和障碍物识别结果,输出安防数据;控制模块用于根据安防数据生成电机驱动指令,电机驱动指令用于控制机器人电机的运动状态。
在其中一个实施例中,图像处理电路还包括设于底盘内的路由模块,路由模块连接在图像处理模块和控制模块之间,且用于连接外部设备。其中,路由模块用于获取安防数据对应的接收对象信息,并根据接收对象信息,将安防数据输出至对应的接收对象处。图像处理模块用于在接收对象为外部设备的情况下,将环境图像数据确认为安防数据;还用于在接收对象为控制模块的情况下,将环境图像数据和/或障碍物识别结果确认为安防数据。
在其中一个实施例中,控制模块包括相互连接的主控制器和导航单元,导航单元还与路由模块连接。其中,导航单元用于根据安防数据生成运动控制指令,主控制器用于根据运动控制指令生成电机驱动指令。
在其中一个实施例中,导航单元还用于获取激光雷达数据,并根据激光雷达数据和/或预先存储的激光点云地图生成运动控制指令。
在其中一个实施例中,图像处理电路还包括音频处理模块,音频处理模块连接图像处理模块且用于连接声音设备。
在其中一个实施例中,音频处理模块包括相互连接的放大器和DSP单元,DSP单元连接图像处理模块,放大器用于连接声音设备。
在其中一个实施例中,安防数据包括环境图像数据、障碍物识别结果和/或障碍物识别控制信息,图像处理模块还用于通过数据包输出安防数据。
在其中一个实施例中,图像处理电路还包括连接图像处理模块的存储模块。存储模块用于进行数据备份。
另一方面,本申请实施例还提供了一种安防机器人,包括机身、底盘和上述的图像处理电路。
在其中一个实施例中,安防机器人还包括用于连接机身和底盘的连接座,连接座包括基座和设于基座底部的若干支撑腿。其中,基座与机身连接,支撑腿与底盘连接,底盘与支撑腿连接处设置有穿线孔,支撑腿内部设置有分别连接穿线孔和机身内部的走线通道。
上述图像处理电路和安防机器人,包括设于机器人机身内的图像处理模块和算力芯片,以及设于机器人底盘内的控制模块,图像处理模块分别连接算力芯片和控制模块。其中,图像处理模块用于对获取到的环境图像数据进行预处理,并输出预处理后的环境图像数据;算力芯片用于采用图像识别算法对预处理后的环境图像数据进行识别,并输出障碍物识别结果;图像处理模块还用于根据环境图像数据和障碍物识别结果,输出安防数据;控制模块用于根据安防数据生成电机驱动指令;电机驱动指令用于控制机器人电机的运动状态。如此,可通过独立设置的算力芯片对环境图像数据进行图像识别,以提高识别效率。同时,还可减少图像处理模块上的数据处理量,降低图像处理器上的工作负荷,从而可提高机器人的控制效率。
附图说明
为了更清楚地说明本申请实施例或传统技术中的技术方案,下面将对实施例或传统技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
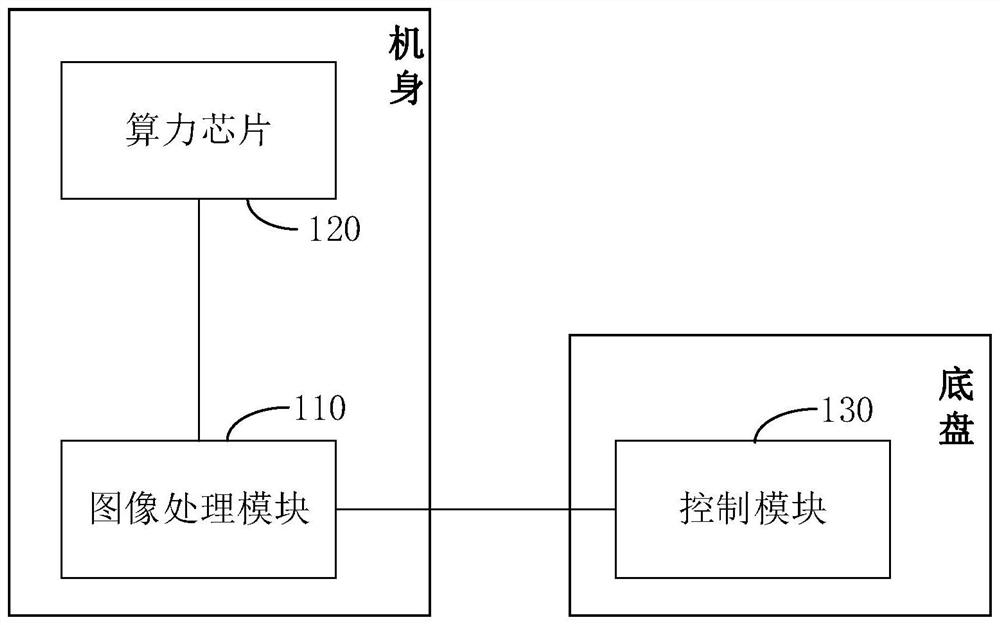
图1为一个实施例中图像处理电路的第一示意性结构框图;
图2为一个实施例中图像处理模块与星光相机的连接示意图;
图3为一个实施例中图像处理电路的第二示意性结构框图;
图4为一个实施例中控制模块的示意性结构框图;
图5为一个实施例中音频处理模块的示意性结构框图;
图6为一个实施例中图像处理电路的第三示意性结构框图;;
图7为一个实施例中安防机器人的结构示意图。
附图标识:
图像处理模块—110,图像处理SOC—112,算力芯片—120,控制模块—130,第一PHY芯片—140,千兆交换机—150,路由模块—160,天线模块—170,导航单元—132,主控制器—134,导航SOC—136,音频处理模块—180,放大器—182,DSP单元—184,第三PHY芯片—210,音频输入连接座—212,第一LAN输入连接座—214,LAN输出连接座—216,硬盘—218,GPS定位器—220,第二PHY芯片—222,第四PHY芯片—224,路由模块—160,第二LAN输入连接座—226,第三LAN输入连接座—228,机身—310,底盘—320,连接座—330,基座—332,支撑腿—334。
具体实施方式
为了便于理解本申请,下面将参照相关附图对本申请进行更全面的描述。附图中给出了本申请的实施例。但是,本申请可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使本申请的公开内容更加透彻全面。
除非另有定义,本文所使用的所有的技术和科学术语与属于本申请的技术领域的技术人员通常理解的含义相同。本文中在本申请的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本申请。
可以理解,本申请所使用的术语“第一”、“第二”等可在本文中用于描述各种元件,但这些元件不受这些术语限制。这些术语仅用于将第一个元件与另一个元件区分。
空间关系术语例如“在...下”、“在...下面”、“下面的”、“在...之下”、“在...之上”、“上面的”等,在这里可以用于描述图中所示的一个元件或特征与其它元件或特征的关系。应当明白,除了图中所示的取向以外,空间关系术语还包括使用和操作中的器件的不同取向。例如,如果附图中的器件翻转,描述为“在其它元件下面”或“在其之下”或“在其下”元件或特征将取向为在其它元件或特征“上”。因此,示例性术语“在...下面”和“在...下”可包括上和下两个取向。此外,器件也可以包括另外地取向(譬如,旋转90度或其它取向),并且在此使用的空间描述语相应地被解释。
需要说明的是,当一个元件被认为是“连接”另一个元件时,它可以是直接连接到另一个元件,或者通过居中元件连接另一个元件。此外,以下实施例中的“连接”,如果被连接的对象之间具有电信号或数据的传递,则应理解为“电连接”、“通信连接”等。
在此使用时,单数形式的“一”、“一个”和“所述/该/其”也可以包括复数形式,除非上下文清楚指出另外的方式。还应当理解的是,术语“包括/包含”或“具有”等指定所陈述的特征、整体、步骤、操作、组件、部分或它们的组合的存在,但是不排除存在或添加一个或更多个其他特征、整体、步骤、操作、组件、部分或它们的组合的可能性。同时,在本说明书中使用的术语“和/或”包括相关所列项目的任何及所有组合。
在一个实施例中,如图1所示,提供了一种图像处理电路,可应用于机器人内,机器人可包括机身、底盘和电机模块,电机模块包括一个或多个电机。该图像处理电路包括图像处理模块110、算力芯片120和控制模块130,图像处理模块110和算力芯片120均设于机身内,控制模块130设于底盘内。图像处理模块110分别连接算力芯片120和控制模块130。其中,图像处理模块110用于对获取到的环境图像数据进行预处理,并输出预处理后的环境图像数据;算力芯片120用于采用图像识别算法对预处理后的环境图像数据进行识别,并输出障碍物识别结果;图像处理模块110还用于根据环境图像数据和障碍物识别结果,输出安防数据;控制模块130用于根据安防数据生成电机驱动指令,电机驱动指令用于控制各电机的运动状态,以控制机器人的运动状态。
具体而言,图像处理模块110为具备数据处理和数据收发等功能的器件或电路,在其中一个实施例中,图像处理模块110可采用图像处理SOC(System on Chip,系统级芯片)进行实现,例如可选用RK3399型号的芯片。图像处理模块110用于获取环境图像数据,其中,环境图像数据可用于反映机器人的周边环境信息,例如前方是否存在人、车、阶梯等障碍物,和/或是否存在如火灾、安全门锁被打开等具备安全隐患的情况。图像处理模块110可与云端服务器、图像(视频)采集设备(如星光相机)或备份设备等相连接,以直接或间接地获取环境图像数据。当间接获取环境图像数据时,图像处理模块110接收初始数据并对初始数据进行相应处理后得到环境图像数据,例如初始数据可为视频数据,此时图像处理模块110可对视频数据进行视频帧截取,以得到环境图像数据。此外,图像处理模块110还用于对环境图像数据进行预处理,并输出预处理后的环境图像数据,其中预处理包括但不局限于图像解码、图像截取等。
在其中一个实施例中,如图2所示,以选用图像处理SOC112实现图像处理模块110为例进行说明,图像处理SOC112可通过第一PHY芯片140、交换机(如千兆交换机150)以及LAN(Local Area Network,局域网)数据线分别连接设于机器人机身壳体上的多个星光相机,并接收各星光相机采集的图像(或视频),根据各图像(或视频)对机器人各侧的环境进行监控,从而可提高图像处理电路的集成度并降低电路体积。
算力芯片120可为具备计算力的芯片或器件,其可通过自身的计算力对接收到的数据进行分析处理以输出对应的结果。在其中一个实施例中,算力芯片120可选用RK1808型号的芯片。算力芯片120上配置有图像识别算法,用于接收预处理后的环境图像数据,并通过图像识别算法对预处理后的环境图像数据进行识别,以确认图像中是否存影响机器人出行的障碍物,并据此生成障碍物识别结果,且将障碍物识别结果返回给图像处理模块110。其中,障碍物识别结果包括但不局限于断崖高度和障碍物的方位、距离、形状、大小等信息。
图像处理模块110在接收到障碍物识别结果的情况下,可根据环境图像数据和障碍物识别结果输出安防数据。具体地,安防数据可包括环境图像数据和/或障碍物识别结果,此外,图像处理模块110还可对环境图像数据和/或障碍物识别结果进行处理,得到处理结果,并基于处理结果生成并输出安防数据。在其中一个实施例中,安防数据包括环境图像数据、障碍物识别结果和/或障碍物识别控制信息,其中障碍物识别控制信息为障碍物识别结果经图像处理模块110处理后得到,其可包括障碍物与机器人的相对位置信息,和/或根据障碍物分布确定的行进状态(例如向左前方运动100米等),此外图像处理模块110还可通过数据包输出安防数据,数据包中可标记有数据类型和接收对象等,以提高数据传输的安全性和可靠性。
控制模块130可为控制机器人运动状态的电路、器件或设备,其可通过控制机器人电机的运动状态以调整机器人的运动状态,例如调整机器人的运动轨迹、运动速度和/或启停状态等。控制模块130在接收到安防数据后,可根据安防数据生成电机驱动指令并输出,使得机器人的电机可在电机驱动指令的控制下进行运动,使得机器人可安全、可靠地运行。
上述图像处理电路中,包括设于机器人机身内的图像处理模块110和算力芯片120,以及设于机器人底盘内的控制模块130,图像处理模块110分别连接算力芯片120和控制模块130。其中,图像处理模块110用于对获取到的环境图像数据进行预处理,并输出预处理后的环境图像数据;算力芯片120用于采用图像识别算法对预处理后的环境图像数据进行识别,并输出障碍物识别结果;图像处理模块110还用于根据环境图像数据和障碍物识别结果,输出安防数据;控制模块130用于根据安防数据生成电机驱动指令;电机驱动指令用于控制机器人电机的运动状态。如此,可通过独立设置的算力芯片120对环境图像数据进行图像识别,以提高识别效率。同时,还可减少图像处理模块110上的数据处理量,降低图像处理器上的工作负荷,从而可提高机器人的控制效率。
在一个实施例中,如图3所示,图像处理电路还包括设于底盘内的路由模块160,路由模块160连接在图像处理模块110和控制模块130之间,路由模块160还用于连接外部设备。路由模块160用于获取安防数据对应的接收对象信息,并根据接收对象信息,将安防数据输出至对应的接收对象处;图像处理模块110用于在接收对象为外部设备的情况下,将环境图像数据确认为安防数据,还用于在接收对象为控制模块130的情况下,将环境图像数据和/或障碍物识别结果确认为安防数据。
其中,外部设备可以为除图像处理电路各组成部分外的器件、设备或电路模块,包括但不局限于云端服务器、终端设备和机器人上的其他电路模块等。进一步地,如图3所示,若需要与云端服务器或终端设备等远程设备进行连接,图像处理电路还可包括与路由模块160连接的天线模块170,使得路由模块160可通过天线模块170与远程设备进行通信连接,完成数据传输。在一个示例中,天线模块170可包括2.4G/5.8G WIFI天线以及2.4G/5.8G的AP(Wireless Access Point,无线接入点)天线,路由模块160可通过PCIE(PeripheralComponent Interconnect Express,高速串行计算机扩展总线标准)/USB(UniversalSerial Bus,通用串行总线)连接天线模块170。
具体而言,图像处理模块110可通过路由模块160分别与控制模块130、外部设备进行数据传输,并向控制模块130、外部设备输出安防数据。当接收对象为控制模块130时,图像处理模块110可将环境图像数据和/或障碍物识别结果确认为安防数据,并通过路由模块160将安防数据输出至控制模块130处,以使控制模块130可根据前述数据或结果控制机器人的运动状态。当接收对象为外部设备时,图像处理模块110可将环境图像数据确认为安防数据,并通过路由模块160将安防数据输出至外部设备处,如此,外部设备可获取环境图像数据并实现远程监控等功能。
在进行数据传输时,路由模块160可接收安防数据并获取与当前安防数据对应的接收对象信息,接收对象信息可为接收对象的设备标识,如服务器标识和终端标识等,用于唯一地标识各接收对象。在获取到接收对象信息后,路由模块160可将安防数据转发至与接收对象信息对应的接收对象处,以完成数据分发。在其中一个实施例中,路由模块160可通过LAN数据线连接图像处理模块110,路由模块160可通过第二PHY芯片连接控制模块130。
上述图像处理电路中,通过在图像处理模块110和控制模块130之间设置路由模块160,从而可通过路由模块160实现数据转发,完成图像处理模块110与控制模块130、外部设备之间的通信。
在一个实施例中,如图4所示,控制模块130包括主控制器134和导航单元132。导航单元132分别连接主控制器134和路由模块160,用于根据安防数据生成运动控制指令;主控制器134用于根据运动控制指令生成电机驱动指令。
具体而言,导航单元132可根据安防数据生成用于指示机器人的运动状态的运动控制指令,主控制器134根据运动控制指令控制机器人电机的运动,以控制机器人避开障碍物行进。在其中一个实施例中,导航单元132可通过第二PHY芯片连接路由模块160,以接收路由模块160发送的安防数据。在另一个实施例中,导航单元132可选用导航SOC进行识别,如RK3399型号芯片,主控制器134可选用STM32实现,导航SOC与STM32之间可通过UART(Universal Asynchronous Receiver/Transmitter,通用异步收发传输器)进行连接。
进一步地,控制模块130还可包括与主控制器134连接的GPS(Global PositioningSystem,全球定位系统)定位器,以实时获取机器人的当前位置,便于导航路径的规划,并提高导航的准确性。
上述图像处理电路中,导航单元132与主控制器134的配合实现控制模块130,通过独立设置的导航单元132生成运动控制指令,并通过主控制器134控制电机的运行,从而可提高响应速度并提高机器人的控制效率。
在一个实施例中,导航单元132还用于获取激光雷达数据,并根据激光雷达数据和/或预先存储的激光点云地图生成运动控制指令。具体而言,导航单元132可与底盘上的360°激光雷达,进一步地,导航单元132可通过第三PHY芯片210连接的360°激光雷达,以获取雷达数据。导航单元132可根据预先存储的激光点云地图、激光雷达数据、环境图像(视频)数据和/或障碍物识别结果生成运动控制指令。当路由模块160通过天线模块170接收到控制客户端发送的遥控指令时,可将遥控指令输出给导航单元132,导航单元132根据预先存储的激光点云地图、激光雷达数据生成运动控制指令并输出至主控制器134,以使主控制器134可控制机器人电机的运动。
在一个实施例中,图像处理电路还包括音频处理模块180,音频处理模块180用于连接图像处理模块110且用于连接声音设备。具体而言,机器人上可设有如麦克风、扬声器等的声音设备,用于进行声音信息采集和/或声音信息的播放。当对环境的声音信息进行采集时,音频处理模块180用于获取并处理初始音频数据,并将处理后的音频数据输出至图像处理模块110,以通过图像处理模块110实现音频数据的转发,例如可转发至云端服务器、终端设备等。当需要播放音频时,音频处理模块180通过图像处理模块110接收待播放音频,并对待播放音频进行相应的处理后输出至声音设备
在其中一个实施例中,如图5所示,音频处理模块180包括放大器182和DSP(Digital Signal Process,数字信号处理)单元。DSP单元184分别连接图像处理模块110和放大器182,放大器182用于连接声音设备。其中,DSP单元184用于对接收到的音频数据进行处理并输出,处理的过程可以但不局限于采样、量化、消噪、消回音和/或消反馈等,以满足多种应用需求。放大器182可对接收到的音频数据进行放大并输出。
上述图像处理电路中,通过音频处理模块180的设置,从而可实现远程获取机器人所在位置的音频数据,便于进行进一步地监控,拓宽机器人的应用场景。
在一个实施例中,图像处理电路还包括存储模块。存储模块连接图像处理模块110,用于对环境图像数据和/或障碍物识别结果进行数据备份,例如当网络故障恢复时,图像处理模块110可从存储模块中获取并发送未在云端服务器或远程终端备份的图像,以在远端进行数据备份。在其中一个实施例中,存储模块可采用硬盘实现。
为便于理解本申请的方案,下面通过一个具体的示例进行说明书。如图6所示,提供了一种图像处理电路,该电路应用于机器人上,机器人包括机身和底盘,机身内设有一功能控制板,底盘内设有一底盘控制板,底盘控制板上集成有用于电机驱动电路。
图像处理电路包括均设于功能控制板上的图像处理SOC112、算力芯片120、放大器182、硬盘218、千兆交换机150、第一PHY芯片140、第三PHY芯片210、硬盘218、音频输入连接座212、第一LAN输入连接座214和LAN输出连接座216。图像处理电路还包括设于底盘控制板上的导航SOC136、主控制器134、GPS定位器220、第二PHY芯片222、第四PHY芯片224、路由模块160、第二LAN输入连接座226、第三LAN输入连接座228和天线模块170。
在处理图像(视频)数据时,图像处理SOC112可依次通过第一PHY芯片140、千兆交换机150和第一LAN输入连接座214连接设于机身上的多个星光相机,并获取各星光相机采集到的图像(视频)数据,在进行预处理(如图像解码)后,将处理后的图像(视频)数据发送至算力芯片120。算力芯片120采用图形识别算法进行识别处理后,将障碍物识别结果发送给图像处理SOC112。图像处理SOC112可根据障碍物识别结果发送障碍物控制信息(或者障碍物识别结果本身)给路由模块160。路由模块160将接收到的数据发送给导航SOC136,导航SOC136根据接收到的数据进行导航处理,并通过主控制器134控制机器人的运动状态,以完成相应的控制。此时,图像(视频)处理过程可以为:图像(视频)数据→图像处理SOC112→算力芯片120→图像处理SOC112→LAN输出连接座216→路由模块160→导航SOC136。
在处理音频数据时,图像处理SOC112、DSP单元184、放大器182、音频输入连接座212和声音设备依次连接,以声音设备为麦克风为例,放大器182通过音频输入连接座212连接设于机身上的麦克风,以获取麦克风采集到的音频数据,并将放大后的音频数据输入至DSP单元184进行处理,DSP单元184将处理后的音频数据发送至图像处理SOC112。此时,音频处理过程可以为:麦克风→放大器182→DSP单元184→图像处理SOC112→LAN输出连接座216→路由模块160。而在进行数据备份时,音视频、图像备份过程可以包括:图像(视频)、音频→图像处理SOC112→硬盘218/或通过LAN输出连接座216发送至底盘控制板的路由上。
在功能控制板与底盘控制控制板进行数据传输时,图像处理SOC112依次通过第三PHY芯片210、LAN输出连接座216和第二LAN输入连接座226,将图像数据、视频数据、图像识别结果和/或音频数据发送至路由模块160中。路由模块160可通过天线连接云端服务器和远程终端等外部设备,也可通过第二PHY芯片222连接导航SOC136。导航SOC136还可通过第四PHY芯片224和第三LAN输入连接座228连接360°激光雷达,导航SOC136还连接主控制器134,主控制器134通过CAN总线连接机器人的电机驱动电路。
在一个实施例中,如图7所示,提供了一种安防机器人,包括机身310、底盘320和上述的图像处理电路。其中,底盘320设置在机身310的下方,并与机身310分体设置,二者可通过固定结构(如卡扣、螺栓等)或者连接部进行机械连接。控制模块130和电机驱动电路均设置在底盘320内,用于对电机进行驱动、控制,以调整安防机器人的运动轨迹,图像处理模块110和算力芯片120均设置在机身310内,以便获取图像采集设备和声音设备所采集的数据。
在一个实施例中,安防机器人还包括用于连接机身310和底盘320的连接座330,连接座330包括基座332和设于基座332底部的若干支撑腿334;基座332与机身310连接,支撑腿334与底盘320连接,底盘320与支撑腿334连接处设置有穿线孔,支撑腿334内部设置有分别连通穿线孔和机身310内部的走线通道。
具体而言,连接座330与底盘320连接并与底盘320共同围成一收容空间,该收容空间可用于容纳探测器。连接座330包括基座332和设置在基座332底部的若干支撑腿334,基座332与机身310机械连接,支撑腿334与底盘320机械连接。在一个示例中,支撑腿334底部设有向下突出的凸起部,底盘320上设置有定位卡接槽,凸起部卡入定位卡接槽内,凸起部起到对支撑腿334的定位作用,同时,在穿线时,当支撑腿334放置在所述底盘320上时,凸起部可起到支撑作用,以避免压线,便于将线路伸入穿线孔内。
底盘320与支撑腿334连接处开设有穿线孔,支撑腿334内部开设有分别连通穿线孔与机身310内部的走线通道。走线通道供从机身310到底盘320的电线等走线。另外,需要说明的是,支撑腿334可以是部分或全部设置有所述走线通道。
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。
- 图像处理电路和安防机器人
- 机器人控制电路和安防机器人