一种智能立体堆料装置及使用方法
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及建筑施工的技术领域,尤其涉及一种智能立体堆料装置及使用方法。
背景技术
随着新城区建设和老城区改造的大力发展,在闹市区施工的情况不可避免,在传统的施工场地布置中,钢筋、模板、木方及钢管等物料堆放需要占用大量的场地空间,在寸土寸金的市区施工场地狭小,大量杂乱无章堆放的物料,不仅对施工造成影响需要经常挪移调整位置,而且不能很好地应对雨雪天气对物料的损害。
发明内容
本发明的目的是为了解决现有技术中不足,故此提出一种智能立体堆料装置及使用方法。
为了实现上述目的,本发明采用了如下技术方案:
一种智能立体堆料装置,包括:
两组对称设置的机架;
分别转动安装在对应机架上的转动架;
多个等间距且两端分别转动安装在对应转动架上的盛放架;
安装在两组机架顶部的滚筒式防水布发射-收纳装置,所述滚筒式防水布发射-收纳装置上设置有温湿检测模块。
优选地:其中一组所述机架上安装有一组稳定系统,所述稳定系统包括定位盘、环形导轨、挡块和锁止块,所述定位盘固定安装在转动架上,所述定位盘上开设有环形导轨,所述环形导轨上设置有若干组均为弧形结构的限位凹槽,所述限位凹槽的位置与盛放架位置对应,所述挡块滑动安装在机架上且滑动方向与定位盘垂直设置,所述挡块与机架之间设置有复位弹簧一,所述锁止块滑动安装在机架上且与挡块的滑动方向垂直设置,所述锁止块的一侧与挡块的一侧抵接,所述锁止块与机架之间设置有复位弹簧二,所述锁止块上安装有连接绳,所述连接绳远离锁止块的一端安装有复位式脚踏板,所述复位式脚踏板安转在机架的底部。
优选地:所述锁止块上设置有斜坡导向面,所述斜坡导向面两端分别为高平面和低平面,所述高平面用于挤压挡块致使定位盘在任何外力作用下均不发生相对机架转动,所述低平面用于释放挡块致使定位盘在瞬间大驱动力作用下发生相对机架转动。
优选地:还包括安装在另一组机架上的驱动器,所述驱动器的输出轴通过传动机构与转动架中心固定安装。
优选地:所述传动机构包括主动轮和从动轮,所述主动轮固定安装在驱动器的输出轴上,所述主动轮为不完全齿轮,所述从动轮固定安装在转动架的中心处,所述从动轮外周面上设置有与主动轮上齿牙相啮合的齿牙以及与非齿牙面相对滑动的弧形凹槽。
优选地:所述滚筒式防水布发射-收纳装置包括盛放筒、防水布电机和刮除件,所述盛放筒内部安装有卷轴且盛放筒外侧设有两处开口,在开口处均安装有刮除件,所述防水布电机安装在盛放筒的外侧且与卷轴连接。
优选地:其中一组所述机架上设置有用于控制驱动器和防水布电机的操控面板。
本发明还公开了一种智能立体堆料装置的使用方法,包括以下步骤:
一、物料盛放阶段:
首先,将物料堆放至位置合适的盛放架上;
其次,脚踏复位式脚踏板通过连接绳带动锁止块上移致使与挡块抵接的面为由高平面转为低平面;
再次,驱动器启动通过主动轮带动从动轮转动至合适角度,同时带动盛放架向一个方向转动,并转动至下一个盛放架处进行物料堆叠,挡块会同时与限位凹槽分离挤压复位弹簧一,并进入环形导轨内部向下一个限位凹槽内部进行移动;
然后,复位式脚踏板复位,锁止块在复位弹簧二的作用下复位致使高平面与挡块抵接,挡块在复位弹簧一的作用下移动至对应的限位凹槽内部,同时驱动器停止;
最后,依次类推直至所有物料堆放成功或者所有盛放架盛满;
二、雨雪覆盖阶段:
首先,温湿检测模块检测到周围环境中湿度超过预警值时将判定为雨雪天气,信息反馈至操控面板,控制防水布电机启动,将卷轴上缠绕的防水布排出,通过人工将装置覆盖;
其次,在温湿检测模块检测到周围环境中温度超过预警值时将判定为晴天,信息反馈至操控面板,控制防水布电机反向启动,将卷轴上缠绕的防水布收纳至盛放筒内部,收纳过程中刮除件对防水布进行清理。
与现有技术相比,本发明具备以下有益效果:
本发明通过设置多个安装在转动架上的盛放架,合理利用空间节约其存储空间,也能方便其操作实用。通过滚筒式防水布发射-收纳装置上设置有温湿检测模块,使得充分适应雨雪天气,使得物料得到保护。还设置有稳定系统,通过稳定系统可以将盛放架定向向一个方向转动。且能转动至合适位置后也能处于一个稳定状态,便于操作者使用,也能保证其操作安全性和可靠性。
附图说明
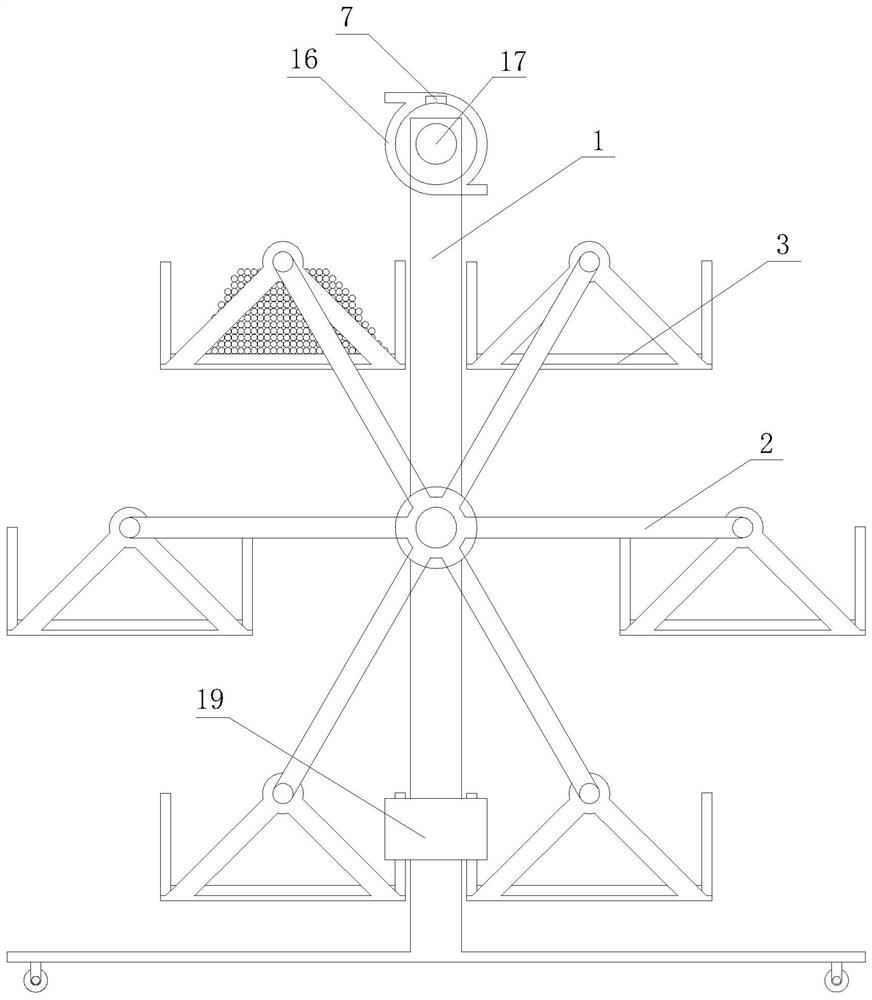
图1为本发明实施例1的整体结构示意图;
图2为本发明实施例1的整体结构工况图;
图3为本发明实施例1的整体结构侧视图;
图4为本发明实施例1的滚筒式防水布发射-收纳装置整体结构侧视图;
图5为本发明实施例2的整体结构侧视图;
图6为图5中A处的局部放大图;
图7为本发明实施例3的整体结构侧视图;
图8为本发明实施例3中传动机构的整体结构示意图。
图中:1、机架;2、转动架;3、盛放架;4、锁止块;41、斜坡导向面;5、限位凹槽;6、复位弹簧一;7、温湿检测模块;8、定位盘;9、环形导轨;10、挡块;11、连接绳;12、复位式脚踏板;13、驱动器;14、主动轮;15、从动轮;16、盛放筒;17、防水布电机;18、刮除件;19、操控面板;20、复位弹簧二。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
实施例1:
如图1至图4所示,一种智能立体堆料装置,包括:
两组对称设置的机架1;
分别转动安装在对应机架1上的转动架2;
多个等间距且两端分别转动安装在对应转动架2上的盛放架3;
安装在两组机架1顶部的滚筒式防水布发射-收纳装置,所述滚筒式防水布发射-收纳装置上设置有温湿检测模块7。
优选地,所述滚筒式防水布发射-收纳装置包括盛放筒16、防水布电机17和刮除件18,所述盛放筒16内部安装有卷轴且盛放筒16外侧设有两处开口,在开口处均安装有刮除件18,所述防水布电机17安装在盛放筒16的外侧且与卷轴连接。
在使用时可以这样实现,首先将物料堆放至合适位置的盛放架3上,人工可以干预转动架2或者由堆放物料后的盛放架3稳定在合适位置处后,再对周边的盛放架3进行堆放物料,直至所有物料堆放完成或所有盛放架3上堆满物料,当温湿检测模块7判定为雨雪天气时,防水布电机17启动将防水布由盛放筒16内部经开口排出,在通过人工对装置进行覆盖,当温湿检测模块7判定为晴天时,防水布电机17反向启动带动防水布收纳至盛放筒16内部,同时刮除件18对防水布进行清理处理保证后续正常使用。
实施例2:
如图5至图6所示,在实施例1的基础上:其中一组所述机架1上安装有一组稳定系统,所述稳定系统包括定位盘8、环形导轨9、挡块10和锁止块4,所述定位盘8固定安装在转动架2上,所述定位盘8上开设有环形导轨9,所述环形导轨9上设置有若干组均为弧形结构的限位凹槽5,所述限位凹槽5的位置与盛放架3位置对应,所述挡块10滑动安装在机架1上且滑动方向与定位盘8垂直设置,所述挡块10与机架1之间设置有复位弹簧一6,所述锁止块4滑动安装在机架1上且与挡块10的滑动方向垂直设置,所述锁止块4的一侧与挡块10的一侧抵接,所述锁止块4与机架1之间设置有复位弹簧二20,所述锁止块4上安装有连接绳11,所述连接绳11远离锁止块4的一端安装有复位式脚踏板12,所述复位式脚踏板12安转在机架1的底部。其中,所述锁止块4上设置有斜坡导向面41,所述斜坡导向面41两端分别为高平面和低平面,所述高平面用于挤压挡块10致使定位盘8在任何外力作用下均不发生相对机架1转动,所述低平面用于释放挡块10致使定位盘8在瞬间大驱动力作用下发生相对机架1转动。首先,将物料堆放至位置合适的盛放架3上;其次,脚踏复位式脚踏板12通过连接绳11带动锁止块4上移致使与挡块10抵接的面为由高平面转为低平面;再次,外界瞬间大作用力通过主动轮14带动从动轮15转动至合适角度,同时带动盛放架3向一个方向转动,并转动至下一个盛放架3处进行物料堆叠,挡块10会同时与限位凹槽5分离挤压复位弹簧一6,并进入环形导轨9内部向下一个限位凹槽5内部进行移动;然后,复位式脚踏板12复位,锁止块4在复位弹簧二20的作用下复位致使高平面与挡块10抵接,挡块10在复位弹簧一6的作用下移动至对应的限位凹槽5内部;最后,依次类推直至所有物料堆放成功或者所有盛放架3盛满。
实施例3:
如图7至图8所示,在实施例2的基础上:还包括安装在另一组机架1上的驱动器13,所述驱动器13的输出轴通过传动机构与转动架2中心固定安装。所述传动机构包括主动轮14和从动轮15,所述主动轮14固定安装在驱动器13的输出轴上,所述主动轮14为不完全齿轮,所述从动轮15固定安装在转动架2的中心处,所述从动轮15外周面上设置有与主动轮14上齿牙相啮合的齿牙以及与非齿牙面相对滑动的弧形凹槽。其中一组所述机架1上设置有用于控制驱动器13和防水布电机17的操控面板19。在使用时可以配合稳定系统使用,当挡块10进入到环形导轨9中驱动器13启动带动转动架2转动将盛放架3转动至合适位置处并在下一个限位凹槽5处使得盛放架3达到锁止状态,实现稳定且可靠的使用。
在某些实施例中:
如图1至图8所示,一种智能立体堆料装置的使用方法,包括以下步骤:
一、物料盛放阶段:
首先,将物料堆放至位置合适的盛放架3上;
其次,脚踏复位式脚踏板12通过连接绳11带动锁止块4上移致使与挡块10抵接的面为由高平面转为低平面;
再次,驱动器13启动通过主动轮14带动从动轮15转动至合适角度,同时带动盛放架3向一个方向转动,并转动至下一个盛放架3处进行物料堆叠,挡块10会同时与限位凹槽5分离挤压复位弹簧一6,并进入环形导轨9内部向下一个限位凹槽5内部进行移动;
然后,复位式脚踏板12复位,锁止块4在复位弹簧二20的作用下复位致使高平面与挡块10抵接,挡块10在复位弹簧一6的作用下移动至对应的限位凹槽5内部,同时驱动器13停止;
最后,依次类推直至所有物料堆放成功或者所有盛放架3盛满;
二、雨雪覆盖阶段:
首先,温湿检测模块7检测到周围环境中湿度超过预警值时将判定为雨雪天气,信息反馈至操控面板19,控制防水布电机17启动,将卷轴上缠绕的防水布排出,通过人工将装置覆盖;
其次,在温湿检测模块7检测到周围环境中温度超过预警值时将判定为晴天,信息反馈至操控面板19,控制防水布电机17反向启动,将卷轴上缠绕的防水布收纳至盛放筒16内部,收纳过程中刮除件18对防水布进行清理。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此。所述替代可以是部分结构、器件、方法步骤的替代,也可以是完整的技术方案。根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种智能立体堆料装置及使用方法
- 一种柔性印刷机立体堆料装置