一种易于拆装电源的续航建筑机器人
文献发布时间:2023-06-19 11:19:16
技术领域
本发明属于无人机应用技术领域,具体地说,涉及一种易于拆装电源的续航建筑机器人。
背景技术
无人驾驶飞机简称“无人机”,英文缩写为“UAV”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主操作。无人机按应用领域,可分为军用与民用。军用方面,无人机分为侦察机和靶机。民用方面,无人机+行业应用,是无人机真正的刚需。随着近些年无人机技术的突飞猛进,无人机在各行各业都得到了广泛应用,从而大大拓展了无人机本身的用途。
与载人飞机相比,无人机具有体积小、造价低、使用方便、对作战环境要求低、战场生存能力较强等优点。根据使用环境和执行任务的需要,无人机在使用时常需要进行长时间留空,现有无人机不论是油动或电动无人机,由于携带的燃料或电池的容量有限,因此留空时间通常较短,目前现有的长时间留空无人机通常采用大翼展的高空无人机配合其机身或机翼上的太阳能电池板发电来作为能源补充实现长时间的续航。但是由于固定翼无人机的特性,其在飞行时只能通过不断的前进,依靠机翼行进时上下表面的空气流速差,进而造成压强差来提供升力,当需要进行固定位置留空时固定翼无人机便无法胜任,从而影响无人机的实际推广应用。
基于以上现状,已有研究通过更换电池的方式来提高无人机的续航能力。如,公开号为CN104973263A的专利公开了一种自动更换电池装置用于自动更换无人机的电池,其无人机设有电池仓,自动更换电池装置包括:电池更换平台、起落平台、电池充电座及电池装取机构,起落平台可相对电池更换平台升降,从而使起落平台能处于高于电池更换平台的位置或与电池更换平台基本平齐的位置或起落平台低于电池更换平台的位置;电池充电座可对从无人机取出的电池进行充电;电池装取机构可将亏电电池从无人机的电池仓取出并置于电池充电座上充电,并将电池充电座上充满电的电池安装到无人机的电池仓。
上述自动更换电池装置不需要人工更换电池,减少了人力,方便了无人机等设备的使用,实现了旋转翼无人机自动不间断巡航。但其更换电池时,还需要设计对应的电池装取机构,这就需要配备相应的电池更换平台,使得电池更换过程复杂,且相应电池更换平台的建设也提高了作业成本。
因此,如何在提高无人机续航能力的基础上使动力电池更换更便捷,并尽可能保证无人机整体结构的轻量化设计是目前亟需解决的一个技术问题。
发明内容
1.要解决的问题
针对现有无人机的续航能力较差,而现有续航无人机电池更换结构和操作复杂的问题,本发明提供了一种易于拆装电源的续航建筑机器人。本发明可以有效提高无人机的续航能力,且其电源更换快捷方便,还能够有效保证无人机飞行过程中的平稳性。
2.技术方案
为了解决上述问题,本发明所采用的技术方案如下:
本发明的一种易于拆装电源的续航建筑机器人,包括无人机本体,无人机本体上沿其四周设有间隔分布的机械臂,机械臂的端部设有旋翼,还包括供电装置,所述供电装置可拆卸安装于无人机本体的下方,其包括安装架、覆铜板和续航电池,覆铜板和续航电池均安装于安装架上,无人机本体通过电刷及覆铜板与续航电池电连接。
更进一步的,所述无人机本体上设有第一磁力吸附装置,安装架上设有与第一磁力吸附装置相对应的第二磁力吸附装置。
更进一步的,所述安装架上位于第二磁力吸附装置的外部设有导向装置,该导向装置为向上开口且内径逐渐增大的锥形结构,且导向装置的上端部与下端部之间通过间隔分布的连接杆相连。
更进一步的,所述第二磁力吸附装置的四周形成向上发散延伸的锥形磁场,该锥形磁场与第一磁力吸附装置的磁性相反。
更进一步的,所述安装架上连接有沿其周向均匀间隔分布的至少三个连杆,所述第二磁力吸附装置位于连杆远离安装架的一端,所述第一磁力吸附装置对应位于机械臂上靠近旋翼的一端。
更进一步的,所述连杆的个数为3个,且其长度均相等,即3个连杆的外端部之间形成等边三角形;所述机械臂的个数为6个,3个连杆分别对应位于依次间隔分布的3个机械臂下方。
更进一步的,所述连杆的个数为8个,8个连杆依次长短交替阵列分布,且所有长连杆的长度均相等,所有短连杆的长度均相等。
更进一步的,所述电刷的一端与无人机本体相连,其另一端搭接于覆铜板上,且与覆铜板搭接的电刷一端设置有扭力弹簧。
更进一步的,所述无人机本体上还安装有起飞电池以及起飞电池保护模块,该起飞电池保护模块包括两个并联的船型开关,所述船型开关的断开和闭合通过遥控器进行控制。
3.有益效果
相比于现有技术,本发明的有益效果为:
(1)本发明的一种易于拆装电源的续航建筑机器人,通过供电装置的设置可以为无人机提供动力源,当需要更换电池时,只需要使无人机与新的供电装置进行连接,无人机本体上的电刷通过覆铜板与续航电池电连接,即可实现无人机的电源更换,提高了无人机的续航能力,且无人机整体结构简单,电源更换简便。
(2)本发明的一种易于拆装电源的续航建筑机器人,所述无人机本体上设有第一磁力吸附装置,安装架上设有与第一磁力吸附装置相对应的第二磁力吸附装置,通过第一磁力吸附装置和第二磁力吸附装置的相互配合来实现无人机本体与供电装置的对位连接,既可以保证其对位连接的精度和牢固性,有利于提高连接效率,同时对位连接操作简单。
(3)本发明的一种易于拆装电源的续航建筑机器人,所述安装架上位于第二磁力吸附装置的外部设有导向装置,通过导向装置的设置可以对无人机本体与供电装置的对位连接进行导向,从而可以有效提高对位精度及无人机工作的效率。
(4)本发明的一种易于拆装电源的续航建筑机器人,第二磁力吸附装置的四周形成向上发散延伸的锥形磁场,通过锥形磁场的设置代替导向装置对无人机本体与供电装置的对位连接进行导向,从而可以进一步提高对位精度以及对位连接效率,同时还能够有效保证无人接飞行过程中无人机本体与供电装置连接的牢固性,有利于提高无人机作业的平稳性,并可以降低供电装置的重量,进而减少续航建筑机器人的自重,降低能耗。
(5)本发明的一种易于拆装电源的续航建筑机器人,所述机械臂的个数为6个,连杆的个数为3个,即第二磁力吸附装置之间形成一个等边三角形,在第一磁力吸附装置和第二磁力吸附装置对接成功后,供电装置对无人机本体的重力分布较为均匀,便于保证续航无人机的稳定飞行,同时这种方案也方便安装制造,且能和机械臂上设置的第一磁力吸附装置更快的对应。
(6)本发明的一种易于拆装电源的续航建筑机器人,所述连杆的个数为8个,8个连杆依次长短交替阵列分布,即8个第二磁力吸附装置26之间的连线形成了一个四角星形状,因此在第一磁力吸附装置与第二磁力吸附装置对接时,可以更精确地控制角度,并提高对位连接的稳定性。
(7)本发明的一种易于拆装电源的续航建筑机器人,电刷与覆铜板搭接的一端设置有扭力弹簧,从而可以增加电刷与覆铜板之间的接触面积,有利于进一步提高续航电池动力输出的稳定性。本发明在续航建筑机器人初次起飞作业时可以通过起飞电池进行供电,而通过起飞电池保护模块的设置可以防止起飞电池和续航电池之间进行切换时烧坏起飞电池。
附图说明
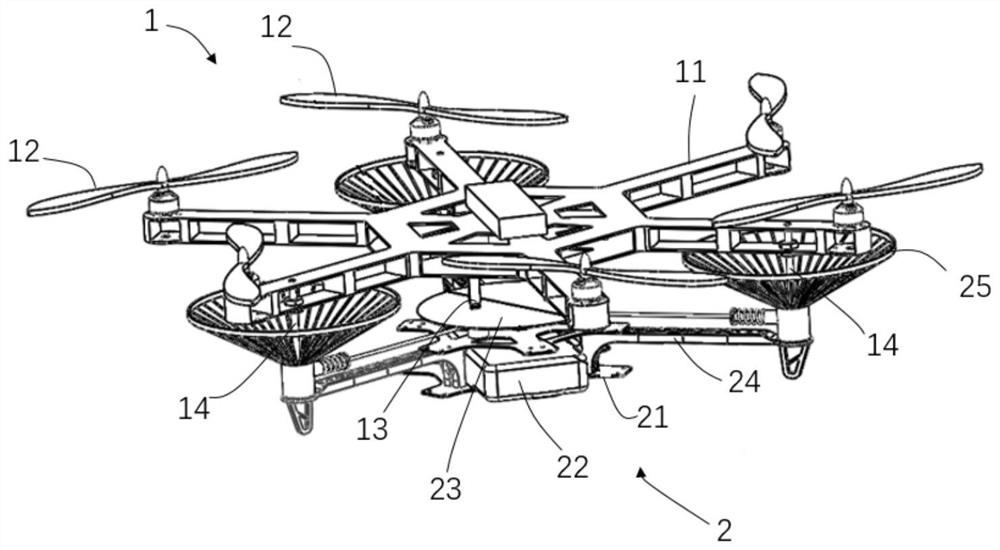
图1为本发明的续航无人机的整体结构示意图;
图2为本发明的供电装置的结构示意图;
图3为本发明的导向装置的结构示意图;
图4为本发明中3个第二磁力吸附装置之间形成等边三角形的简单示意图;
图5为本发明中8个第二磁力吸附装置之间形成四角星形状的简单示意图。
图中:1、无人机本体;11、机械臂;12、旋翼;13、电刷;14、第一磁力吸附装置;2、供电装置;21、安装架;22、续航电池;23、覆铜板;24、连杆;25、导向装置;251、下端部;252、上端部;253、连接杆;26、第二磁力吸附装置。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。其中,所描述的实施例是本发明一部分实施例,而不是全部的实施例。因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。
在本文的说明述中所使用的术语只是为了描述具体的实施例,不是旨在限制本发明,本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意和所有的组合。
实施例1
如图1、图2所示,本实施例的一种易于拆装电源的续航建筑机器人,包括无人机本体1和供电装置2,无人机本体1上沿其四周设有间隔分布的至少3个机械臂11,机械臂11的一端与无人机本体1固定相连,其另一端设有旋翼12。所述供电装置2可拆卸安装于无人机本体1的下方,用于为续航无人机提供动力,其包括安装架21、覆铜板和续航电池22,覆铜板23和续航电池22均安装于安装架21上,无人机本体1通过电刷13及覆铜板23与续航电池22电连接。所述电刷13一端与无人机本体1固连,当供电装置2与无人机本体1安装连接在一起后,电刷13另一端直接搭接于覆铜板23上,而覆铜板23与续航电池22导电相连,从而实现无人机本体与续航电池的连接导通。在电刷13与覆铜板23进行搭接时,为了尽可能地增加电刷13与覆铜板23之间的接触面积,提高续航电池22动力输出的稳定性,本实施例中与覆铜板23搭接的电刷13一端还设置有扭力弹簧(图中省略)。
具体地,本实施例中无人机本体1上设有第一磁力吸附装置14,安装架21上设有与第一磁力吸附装置14相对应的第二磁力吸附装置26。当无人机需要更换电池时,只需控制无人机降落至供电装置2上方,无人机的电刷13搭接于覆铜板23上,便可轻松通过续航电池22为无人机提供动力,而通过第一磁力吸附装置和第二磁力吸附装置的吸附作用,即可以将无人机本体1和供电装置2固定连接起来,使无人机飞行时稳定携带续航电池,同时无人机与供电装置之间的装拆方便,电源更换效率高,有利于提高无人机空中作业的效率。
实施例2
本实施例的一种易于拆装电源的续航建筑机器人,其结构基本同实施例1,其区别主要在于:本实施例中安装架21上位于第二磁力吸附装置26的外部设有导向装置25,如图3所示,该导向装置25为由非磁性材料制成的向上开口且内径逐渐增大的锥形结构(如塑料件),且导向装置25的上端部251与下端部252之间通过间隔分布的连接杆253相连。通过导向装置25的作用对第一磁力吸附装置14与第二磁力吸附装置26之间的对位连接进行导向,从而有利于提高对位连接的精确性以及效率。具体地,所述第一磁力吸附装置14与第二磁力吸附装置26可采用磁杆与孔或槽的配合。但采用上述导向装置25进行导向时,无法有效保证续航建筑机器人在空中作业过程中无人机本体1与供电装置2对位连接的平稳性,从而影响高空作业,如建筑喷涂质量,因此,可进一步优化为在导向装置25的内部位于第二磁力吸附装置26的上方设置环形电磁铁,第二磁力吸附装置26位于环形电磁铁的中心线上,且环形电磁铁的磁性与第一磁力吸附装置14的磁性相反,从而可以进一步提高无人机本体与供电装置对位连接的精确性以及平稳性。
实施例3
本实施例的一种易于拆装电源的续航建筑机器人,其结构基本同实施例1,其区别主要在于:本实施例中所述第二磁力吸附装置26的四周形成向上发散延伸的锥形磁场,该锥形磁场与第一磁力吸附装置14的磁性相反,通过该锥形磁场代替导向装置可以提高无人机本体与供电装置对位连接的精确性以及平稳性,且有利于进一步降低飞行过程中机器人的整体重量。
实施例4
本实施例的一种易于拆装电源的续航建筑机器人,其结构基本同实施例2,其区别主要在于:所述安装架21上连接有沿其周向均匀间隔分布的至少三个连杆24,所述第二磁力吸附装置26位于连杆24远离安装架21的一端,所述第一磁力吸附装置14对应位于机械臂11上靠近旋翼12的一端。具体的,本实施例中机械臂11的个数为6个,连杆24的个数为3个,且其长度均相等,即3个连杆24的外端部之间形成等边三角形(如图4所示),且3个连杆分别与依次间隔分布的3个机械臂磁力相连。采用上述结构,在第一磁力吸附装置14和第二磁力吸附装置26对接成功后,供电装置2对无人机本体1的重力分布较为均匀,便于续航无人机的稳定飞行,同时这种方案结构简单,也方便安装制造,同时能保证供电装置与无人机更快的对应。
实施例5
本实施例的一种易于拆装电源的续航建筑机器人,其结构基本同实施例4,其区别主要在于:本实施例中连杆24的个数为8个,8个连杆24依次长短交替阵列分布,且所有长连杆的长度均相等,所有短连杆的长度均相等,即8个第二磁力吸附装置26之间的连线形成了一个四角星形状(如图5所示),从而有利于进一步提高对接精确性,能够更精确地控制角度。
本实施例中无人机本体1上还安装有起飞电池以及起飞电池保护模块,该起飞电池保护模块包括两个并联的船型开关,所述船型开关的断开和闭合通过遥控器进行控制。通过设置起飞电池,可以在无人机首次飞行时,借助起飞电池对其提供动力。在设置了起飞电池后,当无人机在起飞电池和续航电池22之间进行切换时,通过起飞电池保护模块的设置可以避免切换的过程中烧坏起飞电池。当然,不提供起飞电池的话,在首次起飞时一样可以借助供电装置2为无人机提供动力。
上述起飞电池保护模块包括两个并联的船型开关,船型开关的断开和闭合可通过遥控器进行控制。当电刷13搭接至覆铜板23上时,通过遥控器控制与起飞电池串联的船型开关断开,切断无人机与起飞电池之间的电路。同时通过遥控器控制与续航电池22串联的船型开关打开,连接无人机与续航电池22之间的电路。通过设置两个并联的船型开关,方便遥控器对两个电路进行切换,更好的保护了起飞电池。
具体的,当无人机的动力电池需要更换时,只需控制无人机本体1降落至供电装置2上方。在降落的过程中,控制机械臂11上的第一磁力吸附装置14与供电装置2的连杆24上的第二磁力吸附装置26大致对应,随着无人机本体1的不断下降,电刷13会自然垂落至搭接于覆铜板23上,完成动力电池的切换。同时第一磁力吸附装置14在导向装置的作用下最终顺利与第二磁力吸附装置26对接吸附成功,至此,供电装置2搭载于无人机本体1上,无人机便可继续飞行,使得续航建筑机器人在更换电源方面更加便捷。
- 一种易于拆装电源的续航建筑机器人
- 一种易于拆装电源的续航建筑机器人