一种消防救援机器人摆动装置及消防机器人
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及消防救援机器人摆动装置技术领域,尤其涉及一种消防救援机器人摆动装置及消防机器人。
背景技术
消防机器人作为特种机器人的一种,在灭火和抢险救援中愈加发挥举足轻重的作用。各种大型石油化工企业、隧道、地铁等不断增多,油品燃气、毒气泄漏爆炸、隧道、地铁坍塌等灾害隐患不断增加。消防机器人能代替消防救援人员进入易燃易爆、有毒、缺氧、浓烟等危险灾害事故现场进行数据采集、处理、反馈,消防机器人在灭火救援的过程中,通常需要多个控制阀门和电机对灭火装置进行驱动,使得使用的成本较高,因此需要设计一种消防机器人,可以有效减少使用的成本。
经检索,中国专利申请号为CN201811370999.3的专利,公开了一种消防救援机器人摆动装置,属于消防救援领域,包括:摆动基座,所述的摆动基座固定在机器人活动臂上,机器人活动臂能够控制摆动基座至少2个轴方向的转动和1个方向的移动。
上述专利中的一种消防救援机器人摆动装置存在以下不足:消防机器人摆动装置在摆动的过程中,在功能的实现上较为单一,使得摆动装置产生的效果较差。
发明内容
本发明的目的是为了解决现有技术中存在的消防机器人摆动装置在摆动的过程中,在功能的实现上较为单一,使得摆动装置产生的效果较差的缺点,而提出的一种消防救援机器人摆动装置及消防机器人。
为了实现上述目的,本发明采用了如下技术方案:
一种消防救援机器人摆动装置,包括摆动基座,所述摆动基座顶部外壁通过螺栓固定有安装板,所述安装板一侧外壁通过螺栓固定有电动推杆,所述电动推杆输出端通过螺栓固定有容置架,所述容置架内壁通过转轴转动连接有两个连杆,所述摆动基座顶部外壁通过螺栓固定有集尘箱和灭火箱,所述集尘箱和灭火箱两侧内壁通过螺栓固定有同一个横杆,所述横杆圆周外壁滑动连接有两个滑动座,两个所述连杆远离容置架的一端分别转动连接于两个滑动座内壁,其中一个所述滑动座底部外壁通过螺栓固定有连接柱,所述连接柱一侧外壁通过螺栓固定有U型架,所述U型架两侧内壁转动连接有同一个毛刷辊,所述连接柱圆周外壁通过螺丝固定有安装架,所述安装架一侧外壁通过螺丝固定有导风板,所述导风板一侧外壁通过螺栓固定有吸附填料架,所述集尘箱一侧内壁通过螺丝固定有滤网,所述摆动基座顶部外壁通过螺栓固定有抽气组件,所述抽气组件输出端通过管道连接于集尘箱一侧外壁。
一种消防机器人,包括消防救援机器人摆动装置,所述摆动基座顶部外壁通过螺栓固定有透明筒,所述透明筒顶部外壁通过转轴转动连接有齿轮柱。
优选的:所述容置架顶部外壁通过螺栓固定有齿条架,且齿条架一侧外壁啮合于齿轮柱圆周外壁,所述齿轮柱圆周外壁通过螺丝固定有转动架。
优选的:所述转动架两侧内壁转动连接有转动辊,所述透明筒顶部内壁通过螺丝固定有调节架,所述调节架底部内壁通过螺丝固定有摄像头。
优选的:所述摆动基座两侧外壁转动连接有转向轮组件。
优选的:所述摆动基座一侧外壁设置有电池箱。
优选的:所述灭火箱内部设置有进水腔室和储水腔室,所述灭火箱一侧外壁通过螺丝固定有容置筒,所述进水腔室一侧内壁开设有出水孔。
在前述方案的基础上:另外一个所述滑动座底部外壁通过螺栓固定有锥形堵头,所述锥形堵头一侧外壁卡接有弹簧,所述进水腔室一侧内壁通过螺丝固定有固定板,所述弹簧远离锥形堵头的一端卡接于固定板一侧外壁,所述灭火箱底部内壁通过螺栓固定有高压泵,所述高压泵输出端和输入端分别通过管道连接于储水腔室底部外壁和进水腔室一侧外壁,所述容置筒外壁通过法兰连接有喷水管。
在前述方案的基础上优选的:所述灭火箱底部内壁通过螺栓固定有高压泵,所述高压泵输出端和输入端分别通过管道连接于储水腔室底部外壁和进水腔室一侧外壁,所述容置筒外壁通过法兰连接有喷水管。
在前述方案的基础上进一步优选的:所述滑动座一侧外壁通过螺丝固定有卡位架,且卡位架内壁通过螺丝固定有喷水管圆周外壁。
本发明的有益效果为:
1.通过设置有电动推杆可以控制其输出端带动容置架沿着水平方向进行往复移动,从而可以使得两个滑动座在连杆的摆动下沿着横杆圆周外壁进行滑动,通过设置有抽气组件可以对火灾现场中的烟气进行吸收,通过吸附填料架可以用于对吸附填料进行放置,使得抽气组件吸入到集尘箱内的烟气最终可以被吸附填料进行收集,导风板表面设置有两个以上导风板,从而可以使得在抽气组件的风力作用下带动吸附填料架进行旋转,从而可以使得吸附填料可以进行旋转,从而可以对烟气进行均匀收集。
2.连接柱固定在其中一个滑动座外壁,使得滑动座沿着横杆表面进行滑动的过程中可以带动吸附填料架沿着集尘箱表面进行滑动的同时,吸附填料架利用自身和滤网之间的摩擦力,使得吸附填料架可以进行自转,从而可以对滤网表面积存的烟气进行清理,避免烟气对抽气组件的风口产生堵塞,从而避免风量减少,从而可以提高对烟气进行收集的效果。
3.通过设置有摄像头可以对火灾现场进行拍摄,通过设置有调节架可以对摄像头的拍摄角度进行调节,透明筒为透明结构,通过设置有齿轮柱可以在容置架进行水平往复移动的过程中带动齿轮柱进行转动,从而可以使得转动架带动转动辊沿着透明筒圆周外壁进行滚动,从而可以利用转动辊对透明筒圆周外壁的烟气进行清理,避免摄像头对拍摄视线产生阻挡。
4.通过设置有储水腔室可以对清水进行存储,通过设置有高压泵可以对水进行加压后导入到进水腔室内,锥形堵头呈锥形结构,可以对出水孔进行封堵,同时由于锥形堵头固定在滑动座底部外壁,当滑动座沿着横杆进行滑动时,锥形堵头一端会逐渐从出水孔内脱离,从而使得进水腔室内的清水通过锥形堵头和出水孔之间的间隙内导入到容置筒内,进而可以利用喷水管进行灭火作业。
5.喷水管为软质材料,通过将喷水管固定在卡位架内壁,可以使得卡位架沿着横杆进行水平移动的过程中带动喷水管进行水平移动,从而可以对喷水管喷水的区域和位置进行调节,从而可以提高灭火的范围。
附图说明
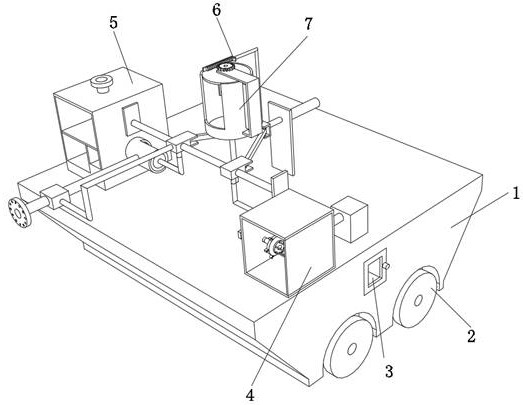
图1为本发明提出的一种消防机器人的整体结构示意图;
图2为本发明提出的一种消防救援机器人摆动装置的整体结构示意图;
图3为本发明提出的一种消防救援机器人摆动装置的主视剖视结构示意图;
图4为本发明提出的一种消防机器人的烟尘收集组件结构示意图;
图5为本发明提出的一种消防机器人的灭火组件背面爆炸结构示意图;
图6为本发明提出的一种消防机器人的灭火组件主视爆炸结构示意图;
图7为本发明提出的一种消防机器人的拍摄组件结构示意图。
图中:1-摆动基座、2-转向轮组件、3-电池箱、4-集尘箱、5-灭火箱、6-齿条架、7-透明筒、8-卡位架、9-横杆、10-抽气组件、11-连杆、12-安装板、13-电动推杆、14-容置架、15-高压泵、16-进水腔室、17-安装架、18-滑动座、19-储水腔室、20-U型架、21-滤网、22-毛刷辊、23-吸附填料架、24-导风板、25-连接柱、26-容置筒、27-锥形堵头、28-弹簧、29-出水孔、30-固定板、31-齿轮柱、32-转动架、33-转动辊、34-摄像头、35-调节架、36-喷水管。
具体实施方式
下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
下面详细描述本专利的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本专利,而不能理解为对本专利的限制。
在本专利的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本专利和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本专利的限制。
在本专利的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”应做广义理解,例如,可以是固定相连、设置,也可以是可拆卸连接、设置,或一体地连接、设置。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本专利中的具体含义。
实施例1:
一种消防救援机器人摆动装置,如图1-4所示,包括摆动基座1,所述摆动基座1顶部外壁通过螺栓固定有安装板12,所述安装板12一侧外壁通过螺栓固定有电动推杆13,所述电动推杆13输出端通过螺栓固定有容置架14,所述容置架14内壁通过转轴转动连接有两个连杆11,所述摆动基座1顶部外壁通过螺栓固定有集尘箱4和灭火箱5,所述集尘箱4和灭火箱5两侧内壁通过螺栓固定有同一个横杆9,所述横杆9圆周外壁滑动连接有两个滑动座18,两个所述连杆11远离容置架14的一端分别转动连接于两个滑动座18内壁,其中一个所述滑动座18底部外壁通过螺栓固定有连接柱25,所述连接柱25一侧外壁通过螺栓固定有U型架20,所述U型架20两侧内壁转动连接有同一个毛刷辊22,所述连接柱25圆周外壁通过螺丝固定有安装架17,所述安装架17一侧外壁通过螺丝固定有导风板24,所述导风板24一侧外壁通过螺栓固定有吸附填料架23,所述集尘箱4一侧内壁通过螺丝固定有滤网21,所述摆动基座1顶部外壁通过螺栓固定有抽气组件10,所述抽气组件10输出端通过管道连接于集尘箱4一侧外壁;通过设置有电动推杆13可以控制其输出端带动容置架14沿着水平方向进行往复移动,从而可以使得两个滑动座18在连杆11的摆动下沿着横杆9圆周外壁进行滑动,通过设置有抽气组件10可以对火灾现场中的烟气进行吸收,通过吸附填料架23可以用于对吸附填料进行放置,使得抽气组件10吸入到集尘箱4内的烟气最终可以被吸附填料进行收集,导风板24表面设置有两个以上导风板,从而可以使得在抽气组件10的风力作用下带动吸附填料架23进行旋转,从而可以使得吸附填料可以进行旋转,从而可以对烟气进行均匀收集,由于连接柱25固定在其中一个滑动座18外壁,使得滑动座18沿着横杆9表面进行滑动的过程中可以带动吸附填料架23沿着集尘箱4表面进行滑动的同时,吸附填料架23利用自身和滤网21之间的摩擦力,使得吸附填料架23可以进行自转,从而可以对滤网21表面积存的烟气进行清理,避免烟气对抽气组件10的风口产生堵塞,从而避免风量减少,从而可以提高对烟气进行收集的效果。
本实施例在使用时,在对火灾现场的烟气进行吸收时,首先对电动推杆13进行远程控制,使得电动推杆13通过容置架14带动两个连杆11进行摆动,从而使得滑动座18沿着横杆9圆周外壁进行往复滑动,从而使得毛刷辊22沿着滤网21表面进行往复滑动,利用吸附填料架23对滤网21表面附着的烟气颗粒进行刮除,同时通过抽气组件10对火灾现场的烟气颗粒进行吸收,吸收后的烟气颗粒通过放置在吸附填料架23上的吸附填料进行吸收。
实施例2:
一种消防机器人,如图1、图5、图6、图7,包括实施例1所述的消防救援机器人摆动装置,所述摆动基座1顶部外壁通过螺栓固定有透明筒7,所述透明筒7顶部外壁通过转轴转动连接有齿轮柱31,所述容置架14顶部外壁通过螺栓固定有齿条架6,且齿条架6一侧外壁啮合于齿轮柱31圆周外壁,所述齿轮柱31圆周外壁通过螺丝固定有转动架32,所述转动架32两侧内壁转动连接有转动辊33,所述透明筒7顶部内壁通过螺丝固定有调节架35,所述调节架35底部内壁通过螺丝固定有摄像头34;通过设置有摄像头34可以对火灾现场进行拍摄,通过设置有调节架35可以对摄像头34的拍摄角度进行调节,透明筒7为透明结构,通过设置有齿轮柱31可以在容置架14进行水平往复移动的过程中带动齿轮柱31进行转动,从而可以使得转动架32带动转动辊33沿着透明筒7圆周外壁进行滚动,从而可以利用转动辊33对透明筒7圆周外壁的烟气进行清理,避免摄像头34对拍摄视线产生阻挡。
为了使消防机器人可以移动;如图1所示,所述摆动基座1两侧外壁转动连接有转向轮组件2;通过设置有转向轮组件2可以使得摆动基座1进行移动。
为了对消防机器人进行供电;如图1所示,所述摆动基座1一侧外壁设置有电池箱3;通过设置有电池箱3可以对消防机器人进行供电。
为了对火灾现场进行灭火;如图5-6所示,所述灭火箱5内部设置有进水腔室16和储水腔室19,所述灭火箱5一侧外壁通过螺丝固定有容置筒26,所述进水腔室16一侧内壁开设有出水孔29,另外一个所述滑动座18底部外壁通过螺栓固定有锥形堵头27,所述锥形堵头27一侧外壁卡接有弹簧28,所述进水腔室16一侧内壁通过螺丝固定有固定板30,所述弹簧28远离锥形堵头27的一端卡接于固定板30一侧外壁,所述灭火箱5底部内壁通过螺栓固定有高压泵15,所述高压泵15输出端和输入端分别通过管道连接于储水腔室19底部外壁和进水腔室16一侧外壁,所述容置筒26外壁通过法兰连接有喷水管36;通过设置有储水腔室19可以对清水进行存储,通过设置有高压泵15可以对水进行加压后导入到进水腔室16内,锥形堵头27呈锥形结构,可以对出水孔29进行封堵,同时由于锥形堵头27固定在滑动座18底部外壁,当滑动座18沿着横杆9进行滑动时,锥形堵头27一端会逐渐从出水孔29内脱离,从而使得进水腔室16内的清水通过锥形堵头27和出水孔29之间的间隙内导入到容置筒26内,进而可以利用喷水管36进行灭火作业。
为了提高灭火的效率;如图2所示,所述滑动座18一侧外壁通过螺丝固定有卡位架8,且卡位架8内壁通过螺丝固定有喷水管36圆周外壁;喷水管36为软质材料,通过将喷水管36固定在卡位架8内壁,可以使得卡位架8沿着横杆9进行水平移动的过程中带动喷水管36进行水平移动,从而可以对喷水管36喷水的区域和位置进行调节,从而可以提高灭火的范围。
本实施例在使用时,首先通过转向轮组件2控制摆动基座1的移动,在对火灾现场进行灭火时,通过控制滑动座18在横杆9表面的滑动,使得锥形堵头27逐渐从出水孔29表面进行脱离,接着通过高压泵15对储水腔室19内的清水进行加压后,清水进入到进水腔室16内,接着通过锥形堵头27和出水孔29之间的间隙导入到容置筒26内,最后通过容置筒26将加压后的清水通过喷水管36进行喷洒,在喷洒的过程中通过卡位架8控制喷水管36的水平移动,从而扩大喷水管36喷水的面积,提高灭火的效率,在转向轮组件2移动的过程中通过摄像头34对火灾现场进行实时的拍摄,通过转动辊33对透明筒7表面进行刷洗,保证摄像头34的拍摄视线不会受到干扰。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种消防救援机器人摆动装置及消防机器人
- 一种消防救援机器人摆动装置及消防机器人