基于对抗训练的无线信号感知模型构建、感知方法及系统
文献发布时间:2023-06-19 11:29:13
技术领域
本发明属于无线信号感知识别技术领域,具体涉及一种基于对抗训练的无线信号感知模型构建、感知方法及系统。
背景技术
随着无线技术和机器学习技术的不断发展,越来越多借助学习算法的无线信号感知技术研究得以开展。例如在手势识别,步态识别,室内定位,健康风险监测,生命探测,情感判别等。无线信号人类活动感知技术主要是利用一定频段的信号的各类信息进行感知,一般包括WiFi、RFID、60GHz等。感知对象的动作行为会影响在传播过程中的无线信号,通过收集和分析这些影响所包含的特征信息,例如信号的幅值、相位、多普勒信息等,建立特征信息和感知对象的行为活动的映射关系,来达到感知识别的目的。
在各类无线信号中,目前WiFi已经是被应用最广泛的信号之一。目前,基于WiFi信号的动作感知工作主要包括以下两种无线信号:接收信号强度(RSSI)和信号通道状态信息(CSI)。RSSI反映的有关是接收信号强度的粗粒度信息,而CSI反映的是链路通信中有关信道状态的细粒度信息,它可以对信号的每一条传播路径进行区分,描述信号在传播环境中的多径状态,因而提供了细粒度的信息,包括信号各个子载波的振幅与相位信息。由于其提供了更加精细的信息,所以作为基于WiFi感知的实现技术被广泛的研究应用。
虽然现有的研究工作已经证明了无线信号特别是CSI在感知领域的能力,但仍有许多问题,特别是传播环境带来的多径干扰对其在感知工作中的进一步应用造成了阻碍。无线信号传播环境中墙壁、非目标人体、陈设物品等对信号的反射和散射会形成除感知目标对信号反射以外的多个传播通路,即多径。来自这些传播通路的信号被接收后,会和由感知目标反射的信号混杂在一起,造成多径干扰,进而影响感知识别的性能。典型的例子就是模型测试环境的更换或随时间推移环境中陈设改变引起多径环境变化,对信号造成影响进而影响识别精度。又因为多径环境改变带来的干扰难以预估和测量,因此现有感知模型难以进行干扰分离以减轻多径干扰对无线信号感知工作的影响。
已有的无线信号感知研究工作,主要可分为两类,即手动提取特征配合感知识别算法和基于深度学习感知识别两种。前者一般要从无线信号领域的理论知识入手,通过数学计算和逻辑分析再结合实验验证,得到特征提取的方法。手动方法提取的特征一般理论较为清晰,但特征维度较为有限,限制了所能包含的信息。常用的手动特征包括:统计特征、频谱特征以及其他感知工作中的自定义特征。配合传统分类算法有支持向量机(SVM),K近邻分类(KNN),决策树分类(DTC)以及随机森林(RF)等完成感知分类。后者通常使用同样由神经网络自动提取的特征值,所以它们一般以一个深度学习模型的整体呈现,通过训练给予训练样本和目标分类,自动完成特征提取和感知分类。由于可以拥有较多的层级和参数,深度神经网络分类可以取得更好的拟合效果,但也可能由于训练数据集以及网络自身结构泛化能力不强等原因出现拟合过慢、欠拟合或过拟合问题。
发明内容
为解决现有技术中存在的不足,本发明提供了一基于对抗训练的无线信号感知模型构建、感知方法及系统,解决现有的无线信号感知方法难以进行干扰分离以减轻多径干扰对无线信号感知工作的影响。
为了解决上述技术问题,本发明采用如下技术方案予以实现:
基于对抗训练的无线信号感知模型构建方法,包括:
步骤1,采集无干扰数据和干扰数据,对无干扰数据标注动作分类标签,得到数据集;
步骤2,对步骤1的数据集进行去噪和数据转化处理,得到预处理后的干扰数据和带有动作分类标签的无干扰数据;
步骤3,将步骤2得到的干扰数据和带有动作分类标签的无干扰数据作为输入,以是否为干扰的判断结果和动作分类结果作为输出,训练对抗网络模型,训练完成后获得无线信号感知模型;
所述对抗网络模型包括特征提取器、干扰判别器和感知分类器;
所述述特征提取器用于将步骤2预处理后的数据中的带干扰数据映射为不带干扰的数据;
所述干扰判别器用于判断特征提取器获得的数据是否为干扰数据,若是带干扰的数据,标注标签为阴性,否则为阳性;
所述感知分类器用于对从特征提取器获得的数据进行分类,得到动作分类标签。
具体的,本发明方法还包括模型解释模块,所述模型解释模块用于根据开源黑盒深度学习模型解释机制Lime对步骤2预处理后的数据和干扰判别器获得的带阴性或阳性标签的数据进行处理,获得无干扰数据对应的干扰判别关键特征和带干扰数据对应的干扰判别关键特征;然后计算无干扰数据对应的干扰判别关键特征和带干扰数据对应的干扰判别关键特征的差异值;将所述差异值加入干扰判别器前一次训练时的损失函数中,获得当前更新后的损失函数,将当前更新后的损失函数作为当前训练中的损失函数。
具体的,所述特征提取器、干扰判别器和感知分类器均为卷积神经网络CNN结构或均为LSTM结构。
具体的,所述步骤2具体包括:
步骤2.1,对步骤1的无干扰数据和带干扰数据进行滤波和主成分分析处理,获得去噪后的数据;
步骤2.2,对去噪后的数据进行归一化处理,将所有数值缩放至[0.1]范围内;
步骤2.3,采用短时傅里叶变换对步骤2.2得到的数据进行处理,将其转化为矩阵数据。
本发明还公开了基于对抗训练的无线信号感知模型构建系统,包括:
数据采集模块,用于采集无干扰数据和干扰数据,且对无干扰数据标注动作分类标签,得到数据集;
数据预处理模块,用于对数据采集模块的数据集进行去噪和数据转化处理,得到预处理后的干扰数据和带有动作分类标签的无干扰数据;
对抗网络模型训练模块,用于将数据预处理模块得到的干扰数据和带有动作分类标签的无干扰数据作为输入,以是否为干扰的判断结果和动作分类结果作为输出,训练对抗网络模型,训练完成后获得无线信号感知模型;
所述对抗网络模型包括特征提取器、干扰判别器和感知分类器;所述特征提取器用于对经过数据预处理模块预处理后的数据中的带干扰数据映射为不带干扰的数据;所述干扰判别器用于判断特征提取器获得的数据是否为干扰数据,若是带干扰的数据,标注标签为阴性,否则为阳性;所述感知分类器用于对从特征提取器获得的数据进行分类,得到动作分类标签。
具体的,本发明的系统还包括模型解释模块,所述模型解释模块用于根据Lime算法对干扰判别器获得的带阴性或阳性标签的特征数据和预处理后的数据进行处理,获得无干扰数据对应的干扰判别关键特征和干扰数据对应的干扰判别关键特征;然后计算无干扰数据对应的干扰判别关键特征和干扰数据对应的干扰判别关键特征的差异值;将所述差异值加入干扰判别器的前一次训练时的损失函数中,获得当前更新后的损失函数,将当前更新后的损失函数作为当前训练中的损失函数。
具体的,所述特征提取器、干扰判别器和感知分类器均为卷积神经网络CNN结构。
具体的,所述数据预处理模块包括:
去噪模块,用于对无干扰数据和带干扰数据进行滤波和主成分分析处理,获得去噪后的数据;
归一化模块,用于对去噪后的数据进行归一化处理,将所有数值缩放至[0.1]范围内;
数据转化模块,用于采用短时傅里叶变换对归一化的数据进行处理,将其转化为矩阵数据。
本发明还公开了基于对抗训练的无线信号感知方法,包括:
步骤1,采集待处理的无线信号数据,对数据进行去噪和数据转化处理;
步骤2,将处理后的数据输入本发明获得的无线信号感知模型中,输出动作分类结果。
本发明还公开了基于对抗训练的无线信号感知系统,包括:
数据采集模块,用于采集待处理的无线信号数据;
数据预处理模块,用于对采集模块的数据进行去噪和数据转化处理;
感知模块,用于将数据预处理模块的数据输入本发明获得的无线信号感知模型中,输出动作分类结果。
与现有技术相比,本发明的有益效果是:
(1)本发明采用对抗训练可以实现对输入数据的定向转换,通过特征提取器和干扰判别器的对抗训练,使得特征提取器能够提取到不包含干扰的信号特征。使用深度学习及对抗训练的机制解决难以预先建模的多径干扰分离函数的映射问题。
(2)本发明使用黑盒模型解释机制Lime,通过对训练数据划分超像素并且将超像素和被解释模型判别结果建立映射关系,标注出数据对于模型做出决策的关键特征,从模型内部工作机理角度指导、促进模型训练。
(3)本发明对训练数据中有干扰数据和无干扰数据的关键特征计算差值,此差值与特征提取器的干扰分离能力成反比,将差值用于监控和评估,更加科学的建立训练评估标准,克服可能出现的训练不充分,过早结束的问题。
附图说明
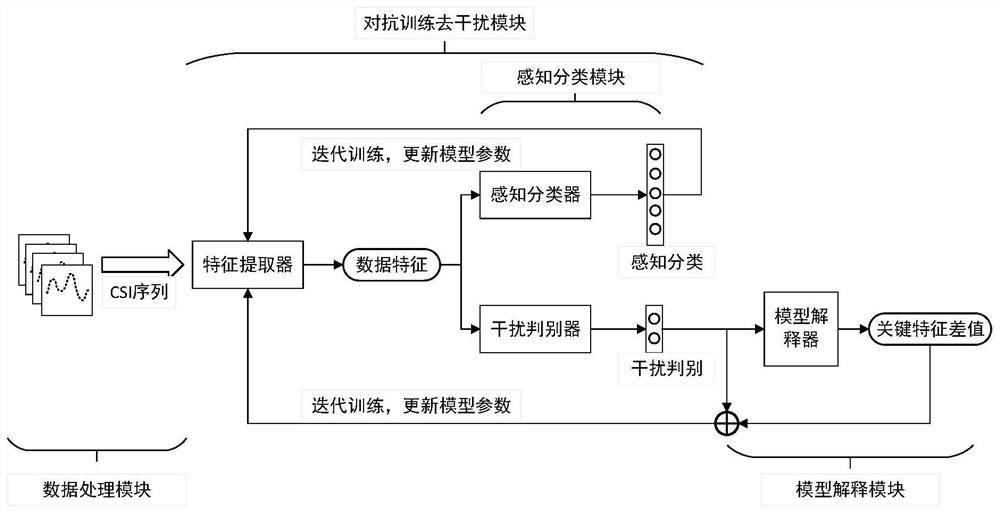
图1是本发明实施例记载的系统的整体框架图。
图2是本发明实施例记载的数据采集及预处理流程。
图3是本发明实施例记载的模型解释器结构图。
图4是本发明实施例记载的模型训练流程图。
图5是本发明实施例的实验环境示意图,(a)所示为微波暗室,(b)所示为会议室。
图6是本发明实施例的数据采集场景设置示意图,(a)所示为微波暗室设置1,(b)所示为微波暗室设置2,(c)所示为会议室设置。
图7是数据的主成分分析(PCA)结果。
图8是实验一中在一种场景的静态多径干扰下本发明模型与对比模型的感知识别准确率。
图9是实验一中在两种场景的静态多径干扰下本发明模型与对比模型的感知识别准确率。
图10是实验二中在一种场景的动态多径干扰下本发明模型与对比模型的感知识别准确率。
图11是分离干扰前后的数据特征进行PCA降维处理后的结果,(a)所示为静态干扰及干扰分离后的PCA结果,(b)所示为动态干扰及干扰分离后的PCA结果。
具体实施方式
本发明中,无干扰数据指只包含目标物体动作的数据,如某个手势动作数据;带多径干扰数据指既目标物体动作数据,也包含干扰物体数据,如手势动作和屋内陈设数据。
以下给出本发明的具体实施例,需要说明的是,本发明并不局限于以下具体实施例,凡在本申请技术方案基础上做的等同变换均落入本发明的保护范围。
实施例1
本实施例公开了一种基于对抗训练的无线信号感知模型构建方法,包括以下步骤:
步骤1,采集无干扰数据和多径干扰数据,且对无干扰数据标注动作分类标签,得到数据集;
步骤2,对步骤1的数据集进行去噪处理和数据转化处理,得到预处理后的多径干扰数据和带有动作分类标签的无干扰数据,具体为:
步骤2.1,对步骤1数据进行滤波和主成分分析处理,获得去噪数据;
步骤2.2,对去噪后的数据进行归一化处理,将所有数值缩放至[0.1]范围内;
步骤2.3,采用短时傅里叶变换对步骤2.2得到的数据进行处理,将其转化为矩阵数据,即灰度图像。
步骤3,将步骤2得到的多径干扰数据和带有动作分类标签的无干扰数据作为输入,以是否为多径干扰的判断结果和动作分类结果作为输出,训练对抗网络模型,训练完成后获得无线信号感知模型。
对抗网络模型包括特征提取器、干扰判别器和感知分类器,其中,
特征提取器,用于将经过步骤2预处理后的数据中的带干扰数据映射为不带干扰的数据,特征提取器输入的是经过步骤2预处理的数据x,输出为经过特征提取器计算的无干扰的数据f。经过特征提取器处理,可尽量剔除掉多径干扰数据中的干扰数据,保留目标物体数据。
干扰判别器,用于判断特征提取器获得的数据是否为带干扰的数据,若为带干扰的数据,将该数据标注标签为阴性,否则为阳性,因此该模块输出的是二分类结果。其中,干扰判别器和特征提取器形成对抗训练。
感知分类器,用于对特征提取器获得的数据进行分类,感知分类器输入的是特征提取器的输出,感知分类器输出的是动作分类标签。
本实施例的特征提取器、干扰判别器和感知分类器均优选卷积神经网络CNN结构。
本发明在模型训练过程中还引入一个模型解释器,主要作用是对参与模型训练的检测和评估,如图5所示为模型解释器的内部结构。模型解释器的建立基于开源黑盒深度学习模型解释机制Lime,被解释模型为干扰判别器,在干扰分离模型每训练完成一轮(epoch)后,干扰判别器被模型解释器解释一次并输出解释结果,而输入数据就是上一个训练模型epoch中的训练数据。模型解释器将输入数据划分为超像素块,通过对干扰判别器的黑盒解释,标注并输出干扰判别器判别一个输入数据是否带多径干扰的决策所依据的关键特征超像素块。
模型解释器的输入为干扰判别器模型和输入数据x,输入数据包括经步骤2预处理后的无干扰数据x
然后计算无干扰数据对应的干扰判别关键特征和带干扰数据对应的干扰判别关键特征的差异值Fd,发明优选的采用欧式距离计算方法计算该差异值,
Dis(Kf
将差异值Fd加入干扰判别器的前一次训练时的损失函数中,获得更新后的损失函数,将更新后的损失函数作为当前训练中的损失函数。
如图4所示,本发明模型在训练时,输入数据正向传播得到输出结果,即是否带干扰的判断结果和感知分类结果;然后模型会计算出损失函数值并进行反向传播用以更新模型参数
更新后的模型参数为:
上式中,G
本发明模型训练过程是按轮批(epoch)迭代训练进行的,直到达到终止训练条件。当同时满足下列两条件时,模型训练终止:(1)相邻按轮批(epoch)关键特征差值Fd变化率小于设定阈值10%,当变化率小于此阈值即为满足本条件(2)干扰判别假阴性率接近100%时满足本条件,训练结果假阴性率指干扰判别器将带干扰数据判别为无干扰数据的比例。设置这样的双重条件作为一个评估训练效果的条件避免出现训练不充分时高假阴性造成训练提前终止。
实施例2
本实施例公开了一种基于对抗训练的无线信号感知模型构建系统,该系统包括:
数据采集模块,用于采集无干扰数据和干扰数据,且对无干扰数据标注动作分类标签,得到数据集;
数据预处理模块,用于对数据采集模块的数据集进行去噪和数据转化处理,得到预处理后的干扰数据和带有动作分类标签的无干扰数据;具体包括去噪模块、归一化模块和数据转化模块:其中,去噪模块用于对无干扰数据和带干扰数据进行滤波和主成分分析处理,获得去噪后的数据;归一化模块,用于对去噪后的数据进行归一化处理,将所有数值缩放至[0.1]范围内;数据转化模块,用于采用短时傅里叶变换对归一化的数据进行处理,将其转化为矩阵数据。
对抗网络模型训练模块,用于将数据预处理模块得到的干扰数据和带有动作分类标签的无干扰数据作为输入,以是否为干扰的判断结果和动作分类结果作为输出,训练对抗网络模型,训练完成后获得无线信号感知模型;
对抗网络模型包括特征提取器、干扰判别器和感知分类器;特征提取器用于对经过数据预处理模块预处理后的数据中的带干扰数据映射为不带干扰的数据;干扰判别器用于判断特征提取器获得的数据是否为干扰数据,若是带干扰的数据,标注标签为阴性,否则为阳性;感知分类器用于对从特征提取器获得的数据进行分类,得到动作分类标签。其中,本发明具体实施例中,特征提取器、干扰判别器和感知分类器均为卷积神经网络CNN结构。
本发明还设置有一个模型解释模块,如图3所示,模型解释模块用于根据Lime算法对干扰判别器获得的带阴性或阳性标签的特征数据和预处理后的数据进行处理,获得无干扰数据对应的干扰判别关键特征和干扰数据对应的干扰判别关键特征;然后计算无干扰数据对应的干扰判别关键特征和干扰数据对应的干扰判别关键特征的差异值;将所述差异值加入干扰判别器的前一次训练时的损失函数中,获得当前更新后的损失函数,将当前更新后的损失函数作为当前训练中的损失函数。
实施例3
本实施例公开了一种基于对抗训练和模型解释的无线信号感知方法,包括:
步骤1,采集待处理的无线信号数据,对数据进行去噪和数据转化处理;
步骤2,将处理后的数据输入实施例1获得的无线信号感知模型中,输出动作分类结果。
以下给出本实施例的感知方法的具体实验结果,本实验中,本发明无线信号感知模型中的特征提取器、干扰判别器和感知分类器均采用CNN结构或者均采用LSTM结构,其中,在使用LSTM实现的模型时,数据预处理省去傅里叶变换处理过程,直接使用经过尺寸裁剪的CSI序列作为数据的输入格式。
另外,作为本发明模型的对比,分别构建CNN与LSTM模型两个对比模型。构建的CNN模型在网络结构上保留本发明的特征提取器和感知分类器,舍弃干扰判别器。构建的LSTM模型上述的CNN模型相同。对比模型不具备对抗训练分离多径干扰的功能。
实验环境和数据采集:
实验在两种实验环境中采集实验数据,图5显示了在这些实验环境的基本情况:图5(a)是微波暗室,外壁由反射波材料包裹用于隔绝外壁电磁波干扰,内壁使用吸波材料包裹用于吸收来自发射端散射到内壁的信号,微波暗室内部没有其他陈设,最大限度避免除感知目标以外的其他传播路径,杜绝多径干扰;采集到的无干扰数据便是自微波暗室中收集而来。图5(b)是较宽敞的会议室,室内有会议室中常规的陈设,用于构建较大面积空间中的多径干扰环境。本次实验在上述两个环境中进行实验数据的采集。
无线设备设置:信号发送接收端均采用安装5300网卡的小型工控主机,带有3根天线,发送接收端同步工作。设置monitor模式,主机操作系统为Ubuntu16.04,安装使用开源CSI软件csi-tool,以每秒1000个数据包的频率进行CSI信号的发送接收。
实验数据集:包含两类感知目标,人手势和机械臂动作。图6展示了在微波暗室和会议室中的无线数据采集设置。图6中(a)、(b)是微波暗室数据集采集设置,微波暗室长宽分别为2.5m和2m,图6中(c)是办公室数据采集设置,办公室的长宽分别为5m和6m,在图中以信号发送端为原点,坐标(0,0),信号接收端及其他各采集点有相对于发送端的坐标值,单位为厘米。
图6(a)构建了第一类微波暗室设置:感知对象(人或机械臂)位于发送接收端连接线上的中点P1,而其他采集点用于构建多径干扰。P2、P3、P4分别为距离P1由近到远站立的人员,构建静态多径干扰,P5、P6分别为两种干扰人在数据采集时走动的横竖两种轨迹,构建动态多径干扰。图6(b)构建了第二类微波暗室设置:感知对象位于信号发送接收端的连线上,共有三个位置P1、P2和P3,用于收集感知对象在不同位置时的数据,P4和P5分别为感知对象在P1时放置干扰物的位置,构建静态干扰。图6(c)构建了会议室数据采集设置,和第二类微波暗室设置类似,P1、P2和P3是在发送接收端设备之间的连线上的感知对象位置。与第二类微波暗室设置不同的是,P4和P5为非连接线上的感知对象位置,而不是放置干扰物位置,因为会议室的墙壁和陈设物品已经起到多径作用。
表5-1对3类实验场景设置进行了汇总,微波暗室1场景,以人体为干扰来源,通过人的站立不动和走动分别构建3种静态和2种动态干扰,同时利用微波暗室的特性构建无干扰数据。微波暗室2场景,以感知目标对象的位置不同和木质物品架(24×24×170cm)作为干扰来源构建静态干扰,同样也采集了无干扰数据。会议室场景,改变感知目标对象位置,和会议室内的陈设共同构成5种静态多径干扰。
表5-1
表5-2是3种实验场景设置所采集的数据包含的动作种类,同一实验场景下的无干扰和各种多径干扰数据都包含着表中所列的动作种类。为了对比在不同感知目标的干扰分离效果,本发明中进行了人手势和机械臂动作两种感知目标数据的采集。表5-3是两种感知目标和实验场景的对应关系,其中人手势数据集的实验场景较为全面,包含了全部三种实验场景,机械臂作为对比对象,采集了微波暗室2场景数据。
表5-2
表5-3
实验结果
实验一:静态干扰下实验结果
在进行实验之前,首先对数据进行观察分析。如图7所示,选择微波暗室场景1人手势数据,对无干扰数据、静态干扰1和动态干扰1数据分别进行主成分分析(PCA)降维处理,将数据投影到二维特征空间。从图7中观察到,多径干扰会显著的对数据造成影响,不同的多径环境下的数据形成各自不同的区域聚集性;且无干扰数据样本在特征空间中的聚集程度最高,受到静态多径干扰的数据聚集度次之,而受到动态多径干扰的数据分布最为分散。因此,这样就从数据分布层面验证了多径干扰对无线信号的影响。不同的多径干扰会对数据造成影响,使数据之间产生差异。接下来,首先针对静态多径干扰数据进行实验,主要从感知识别准确率的角度进行评估分析。
将每种有干扰数据以3:1的比例划分为训练数据和测试数据,其中训练数据和无干扰数据组合成训练集。而对于用于对比的CNN及LSTM模型,训练集只包含无干扰数据,测试集与本发明模型相同。
对微波暗室1场景下的静态多径干扰进行分离实验,主要关注对人躯体带来的多径干扰的适应能力。实验结果如图8所示,可以看到,在以无干扰数据做为测试数据时,不论是本发明还是对比模型,感知识别准确率都达到100%;然而由于受静态多径干扰的影响,以带静态干扰数据作为测试数据时,对比模型准确率下降为70.48%到75%的区间内,其中LSTM准确率总体略低于CNN。而本发明(指图8中的CNN模型干扰分离和LSTM模型干扰分离)的感知识别准确率有明显提升,在85%到89.26%的区间内。
对微波暗室2和会议室两场景下的静态多径干扰进行分离实验,主要关注本发明对信号传播空间中的墙壁、陈设物品以及感知对象所处位置不同带来的多径干扰的适应能力。实验结果如图9所示,可以看到,本发明和对比模型在无干扰测试数据上的表现均为100%;但在带干扰数据测试集中,LSTM和CNN对比模型的感知识别准确率均受到影响,其中会议室各干扰场景下性能下降更为明显,感知准确率在34.49%到43.61%之间,原因在于会议室提供了相对于微波暗室更加复杂的多径情况,和微波暗室1场景一样,LSTM的感知准确率略低于CNN。在使用本发明(指图9中的CNN模型干扰分离和LSTM模型干扰分离)后,所有干扰情况的准确率都提升到了80%以上,其中微波暗室2场景准确率85.74%到89.63%,而会议室场景准确率在80.33%到83.62%之间。
上述实验证明了:由人躯体,墙壁已经陈设物品等引起的多径干扰会对无线感知工作的性能造成显著的影响,越复杂的多径环境造成的干扰越大。而本发明模型可以有效的分离干扰,使得感知模型面对多径干扰时的性能影响减小。
实验二:动态干扰下实验结果
模型方面,与实验一总体上相同;在数据集方面,使用微波暗室1场景的无干扰数据和两类动态干扰数据,图6(a)中可以看出,动态多径干扰由实验环境中非感知目标人员的移动提供。实验的其他各方面,如训练集测试集划分、模型的训练流程和测试流程等均与实验一相同。
实验结果如图10所示,和静态多径干扰一样,动态干扰对感知识别模型的性能也造成影响,CNN和LSTM对比模型的平均准确率从100%分别下降到了66.67%和65.6%,低于在同一场景中静态干扰的准确率,原因在于动态多径变化相对于静态多径变化时变性更强,带来了更加复杂的干扰。从图7中也可以观察到,动态干扰相比静态干扰造成PCA后的特征空间更加分散。而本发明的总体准确率在83.33%到87.3%区间内。证明了本发明的模型面对感知工作中短时间内动态变化的多径环境带来的干扰也能发挥有效的分离作用。
上述实验对本发明的整体性能进行了评估,从感知工作准确率的角度证明了干扰分离的有效性。图11展示了分离干扰前后的数据特征进行PCA降维处理后的结果:干扰分离之前,不论是静态干扰还是动态干扰,其特征分布与无干扰数据均不同,且分布的更加离散;干扰分离后数据的特征分布与无干扰数据相似性很高,进一步证明了本发明模型感知的整体性能。
- 基于对抗训练的无线信号感知模型构建、感知方法及系统
- 训练频谱感知模型的方法及系统、频谱感知方法及系统