一种智能烙馍摆放机和智能烙馍机
文献发布时间:2023-06-19 11:32:36
技术领域
本发明属于食品机械领域,尤其是一种智能烙馍摆放机和智能烙馍机。
背景技术
市场上主要有两类烙馍机,一种是滚筒式,如中国专利2010205267711《全自动烙馍机》,还有一种是传送带式的,如中国专利2017211635816《多功能全自动数控烙馍机》。这两类烙馍机工作效率都比较高,但是烙馍生产出来后,质量检测和摆放需要专门的一个人来完成。所以一套烙馍生产线至少需要2个人,人工费用较高,需要对现有烙馍生产线进行智能化改造,以节省人工,提高生产效率。
发明内容
本发明的目的在于提供一种智能烙馍摆放机和智能烙馍机。通过增加一个机械手臂和计算机控制系统,来实现烙馍的自动检测和摆放。
本发明提供一种智能烙馍摆放机,包括摄像机、控制电脑、传感器、数据连接线、工作台、机械手臂、成品桶和废料桶,摄像机用于采集烙馍的形状大小和运动轨迹,控制电脑用于对烙馍的质量、大小和运动轨迹进行分析,机械手臂在控制电脑的控制下运动,所述工作台上有导向板,工作台一边有成品桶,工作台另一边有废料桶,机械手臂包括直线电机及导轨,直线电机上方连接一个旋转控制电机,旋转控制电机带动连接杆转动,连接杆另一端设有一个钢针控制器,钢针控制器控制钢针伸缩,当烙馍到达工作台后,机械手臂上的钢针插入到烙馍中,同时控制电脑对由摄像机传来的该烙馍图像进行智能分析,根据控制电脑对该烙馍的判断,废品烙馍,旋转电机转动,把废品直接放入废品桶,当该烙馍是成品时,直线电机启动,机械手臂带动烙馍移动,在烙馍移动过程中,如果烙馍几何中心不在烙馍移动方向线上,在烙馍移动方向线两边的一个烙馍的两个部分和工作台面产生的摩擦力就会不平衡,不平衡的摩擦力会产生扭矩,摩擦力产生的扭矩迫使烙馍几何中心以钢针为转动轴转动到钢针移动方向线上,当烙馍加速移动时,惯性力也会以同样方式迫使烙馍几何中心以钢针为转动轴转动到钢针移动方向线上,另外导向板对和其接触的烙馍产生一个侧推力,这个侧推力也会迫使烙馍几何中心以钢针为转动轴转动到钢针移动方向线上,当烙馍达到成品桶上方设定位置,位置传感器把信号传给控制电脑,控制电脑控制钢针从烙馍中拔出,烙馍落入成品桶。本发明利用摩擦力、惯性力和导向板的侧推力迫使烙馍几何中心移动到钢针移动方向线上(钢针移动方向线就是设定的中心线),完成烙馍一个方向的对齐,而后再利用位置传感器定位烙馍边部位置,完成烙馍在另一个方向的对齐,从而完成烙馍的对齐摆放。本发明利用摄像机完成对烙馍图像和运动轨迹的信息采集,通过控制电脑中人工智能软件对烙馍图像和运动轨迹的信息进行分析判断,实现对烙馍质量、尺寸和运动轨迹的检测。
上述智能烙馍摆放机,其特征是,还可以利用活塞气缸机构替换直线电机和旋转电机。这是利用活塞气缸机构对直线电机和旋转电机等效替换。
上述智能烙馍摆放机,其特征是,钢针还可以换成夹子,首先夹子控制器控制夹子打开夹住烙馍,而后控制电脑判断烙馍几何中心距离设定的中心线的远近,控制电脑指挥旋转电机转动,带动烙馍几何中心移动到设定的中心线,而后直线电机启动,把合格烙馍带到成品桶上方设定位置,位置传感器把信号传给控制电脑,控制电脑控制夹子放开烙馍,烙馍落入成品桶。和用钢针相比,用夹子的控制电脑的控制程序要复杂一些,控制精度要求也更高一些。
本发明还提供一种智能烙馍机,包括面团挤压装置、压面装置、传送装置、加热装置、控制电脑、动力装置、风干装置,其特征是:面团挤压装置和一个可变行程活塞气缸结构相连,面团首先被挤入气缸内,气缸被塞满面团后,再关闭气缸的进面口,打开出面口,而后把面团从气缸内推出,通过改变活塞行程改变气缸内容积,实现对进入气缸的面团体积控制,还包括一个上述智能烙馍摆放机。
本发明有益之处在于通过增加一个智能烙馍摆放机,提高生产效率,节省人工。一个人可以值守2-3台烙馍机,降低生产成本。
附图说明:
图1是本发明智能烙馍摆放机和智能烙馍机示意图
图2本发明智能烙馍摆放机机械手上视图
图3是可变行程活塞气缸结构示意图
图4是夹板式机械手示意图
图5是烙馍运动示意图
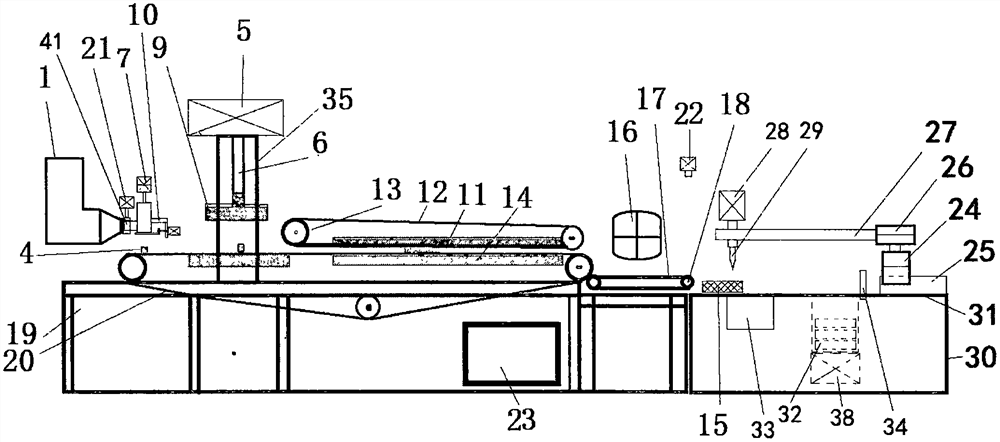
1-挤面机构,2-面胚切割控制器,3-切面刀,4-面胚,5-压面装置控制器,6-连接柱,7-可调行程活塞气缸,8-活塞,9-下压板,10-连接架,11-上加热板,12-上传送带,13-传动轮,14-下加热板,15-熟烙馍,16-风干装置,17-右传送带,18-传动轮,19-机体支架,20-下传送带,21-阀门控制器,22-摄像机,23-控制电脑,24-直线电机,25-导轨,26-旋转控制电机,27-连接杆,28-钢针控制器,29-钢针,30-工作台支架,31-工作台面,32-成品桶,33-废料桶,34-位置传感器,35-压面气缸支架,36-上夹板,37-下夹板,38-成品桶升降控制器,39-上导向板,40-下导向板,41-阀门,42-控面气缸。
具体实施方式
如图1所示,这是本发明智能烙馍摆放机和智能烙馍机示意图。智能烙馍摆放机由摄像机22、控制电脑23、直线电机24、旋转控制电机26、连接杆27、钢针控制器28、钢针29、工作台支架30、工作台面31、成品桶32、废料桶33、位置传感器34、成品桶升级控制器38、上导向板39和下导向板40构成。摄像机22首先拍摄到熟烙馍15的图像和运动轨迹信息,而后把熟烙馍15的图像和运动轨迹信息传送给控制电脑23,控制电脑23分析熟烙馍15是否完整,如果熟烙馍15是完整的,则控制电脑23控制钢针控制器28把钢针29扎入熟烙馍15中,而后控制电脑23控制直线电机24向右运动,带动熟烙馍15向右运动,由于熟烙馍15和工作台面31之间有摩擦力,这个摩擦力产生的扭矩迫使烙馍15几何中心以钢针29为转动轴转动到钢针29移动方向线上,当烙馍加速移动时,惯性力也会以同样方式迫使熟烙馍15几何中心以钢针29为转动轴转动到钢针29移动方向线上,另外上导向板39和下导向板40对和其接触的烙馍产生一个侧推力,这个侧推力也会迫使烙馍15几何中心以钢针29为转动轴转动到钢针29移动方向线上,当烙馍达到成品桶32上方设定位置,位置传感器34把信号传给控制电脑23,控制电脑23控制钢针29从烙馍15中拔出,烙馍落入成品桶32。成品桶升级控制器38在控制电脑23的控制下,根据烙馍多少升降成品桶32,便于控制烙馍落下距离不要太长,保证烙馍在降落过程中不会卷曲。根据控制电脑对该烙馍的判断,废品烙馍,控制电脑控制旋转电机26转动,把废品烙馍直接放入废品桶33。
如图1、图3所示。面团经过阀门41挤入控面气缸42中,活塞8和切面刀3之间的控面气缸42中的容积是能够挤入面团的容积,通过控制活塞8上止点位置来改变控面气缸42内容纳面团的容积,可调行程活塞气缸7用来调节活塞8的上下运动并控制活塞8的上止点。可调行程活塞气缸7也可以用直线电机代替。当面团充满控面气缸42中空间后,阀门控制器21关闭阀门41,切面刀3打开,活塞8向下运动把面团推出控面气缸42,当活塞8向下运动到下止点时,切面刀3关闭,切面刀3把面团切下并掉落到传送带上(如图1中面胚4)。而后经过压片,加热,风冷等过程,面胚变成熟烙馍。
图4所示,这是夹板式机械手示意图。上夹板36和下夹板37配合夹住烙馍,控制电脑23分析熟烙馍15是否完整,如果熟烙馍15是不完整的,控制电脑23控制旋转控制电机26转动,熟烙馍15被带到废料桶33上方,而后上夹板36和下夹板37分开,废品烙馍掉进废料桶33中。如果熟烙馍15是完整的,控制电脑23控制旋转控制电机26转动,熟烙馍15的几何中心被带到设定的中心线上,而后当烙馍达到成品桶32上方设定位置,位置传感器34把信号传给控制电脑23,控制电脑23控制上夹板36和下夹板37分开,烙馍落入成品桶32。
如图5所示,这是烙馍运动示意图,在烙馍运动方向上下两边烙馍部分大小不一样,上边大,下面小,烙馍几何中心在烙馍运动方向线的上方,由于烙馍和工作台面之间有摩擦力,上边部分烙馍面积大,产生的摩擦力就大,下面部分烙馍面积小,产生的摩擦力就小,上下部分摩擦力大小不一样产生的扭矩迫使烙馍几何中心以钢针为转动轴转动到钢针移动方向线上,当烙馍加速移动时,惯性力也会以同样方式迫使烙馍几何中心以钢针为转动轴转动到钢针移动方向线上,另外上导向板对和其接触的烙馍产生一个侧推力,这个侧推力也会迫使烙馍几何中心以钢针为转动轴转动到钢针移动方向线上。钢针向右移动的轨迹在设定的中心线上。
- 一种智能烙馍摆放机和智能烙馍机
- 一种烙馍机和带馅料烙馍