一种具有高稳定性的智能叉车
文献发布时间:2023-06-19 11:44:10
技术领域
本发明涉及智能叉车技术领域,特别涉及一种具有高稳定性的智能叉车。
背景技术
叉车(forklift)是指对成件托盘货物进行装卸、堆垛和短距离运输作业的各种轮式搬运车辆,用额定起重量、载荷中心距、门架倾角等技术参数来表明叉车的结构特征和工作性能,通常分为内燃叉车、电动叉车等类型。
传统的智能叉车在使用过程中,当地面坑洼时,会使得两个用于驱动的驱动轮与地面的接触面积及压力减小,导致打滑智能叉车无法移动,针对以上问题以下提出一种解决方案。
发明内容
本发明的目的是提供一种具有高稳定性的智能叉车,解决智能叉车在经过坑洼路面时与地面的接触面积及压力较小造成的打滑。
本发明的上述技术目的是通过以下技术方案得以实现的:
一种具有高稳定性的智能叉车,包括车架,所述车架的前端固定连接有用于叉货的门架系统,所述车架内部设置有用于驱动门架系统的工作驱动系统,所述车架的外侧面设置有导向组件,所述车架顶部固定设置有控制组件,所述工作驱动系统和导向组件均与控制组件电性连接,所述车架内部对称且固定设置有连接固定座,所述连接固定座的一侧转动设置有连杆,所述连杆的一端转动设置有承接杆,所述承接杆的一端转动连接有支撑杆,所述支撑杆与连接固定座的另一端转动配合,所述支撑杆的一端固定连接有支撑板,所述支撑板底部固定设置有万向轮,所述万向轮穿过车架底部,所述支撑板的上端面设置有与连接固定座固定连接的缓冲组件,所述承接杆的一端固定连接有安装板,所述安装板上穿设有行走驱动总成,所述行走驱动总成与控制组件电性连接,所述行走驱动总成与安装板固定连接,所述行走驱动总成的输出端固定连接有驱动轮,所述驱动轮穿过连接车架底部。
采用上述技术方案,使用时,控制组件启动,控制组件带动导向组件启动,导向组件启动对外部进行规划,将规划完成后的路线反馈给控制组件,控制组件收到反馈启动行走驱动总成,行走驱动总成带动驱动轮转动,驱动轮与万向轮配合起到平衡作用,通过驱动轮带动车架进行移动,车架带动门架系统移动,使得门架系统移动至产品的下方,控制组件启动工作驱动系统,工作驱动系统为门架系统提供动力,使得门架系统上升,门架系统上升带动产品上升,从而起到搬运产品的作用,同时行走驱动总成可以控制驱动轮的转向作业,从而控制整体转向,当遇到坑洼路段时,万向轮与驱动轮之间的平衡打破,万向轮被顶起,万向轮带动支撑板移动,支撑板带动支撑杆移动,由于支撑杆、连接固定座、连杆和承接杆形成平行四边形结构,且连接固定座固定连接,使得支撑杆靠近支撑板的一端向运动时,支撑杆靠近承接杆的一端向下运动,连杆起到稳定作用避免承接杆翻转,从而使得承接杆带动安装板向下运动,安装板带动行走驱动总成向下运动,行走驱动总成带动驱动轮向下运动,从而保证整体的平衡性,且在支撑板向上运动时,支撑板会作用在缓冲组件上,缓冲组件对支撑板起到缓冲作用,从而对万向轮起到缓冲作用。
作为优选,所述缓冲组件包括缓冲板和缓冲垫,所述缓冲板位于支撑板的上端,且所述缓冲板与车架固定连接,所述缓冲垫位于缓冲板与支撑板之间,所述缓冲垫与缓冲板固定连接。
采用上述技术方案,支撑板向上运动时,支撑板会作用在缓冲垫上,缓冲垫采用橡胶材质,具有良好的弹性和耐磨性,当支撑板作用在缓冲垫上时,缓冲垫发生形变,产生复位力,从而起到缓冲作用,同时高耐磨性可以延长缓冲垫的使用寿命,同时缓冲板起到支撑和阻挡作用。
作为优选,所述控制组件包括的锂电池和控制器,所述锂电池固定在车架的顶部,所述控制器位于锂电池一侧,且所述控制器与车架固定连接,所述控制器与锂电池电性配合,所述控制器与行走驱动总成电性连接。
采用上述技术方案,锂电池为工作驱动系统、导向组件和行走驱动总成供电,同时控制器控制工作驱动系统、导向组件和行走驱动总成的启动与停止。
作为优选,所述导向组件包括避障雷达和激光导航雷达,所述避障雷达对称布置在车架的两侧侧面,所述避障雷达与控制组件电性连接,所述激光导航雷达固定在门架系统的上端面,且所述激光导航雷达与控制组件电性连接。
采用上述技术方案,激光导航雷达起到导航作用,使得整体设备跟随规定的路线进行行走,避障雷达起到躲避路线上的障碍的功能,保证整体的安全性。
作为优选,两个所述承接杆之间设置有销轴一,所述销轴一穿过连杆和承接杆,所述支撑杆的一侧设置有销轴二,所述销轴二穿过承接杆和支撑杆。
采用上述技术方案,销轴一和销轴二起到连接作用,将两个承接杆连接为整体提高整体的强度。
作为优选,所述避障雷达的一侧设置有防撞触边,所述防撞触边与车架的外侧面固定连接。
采用上述技术方案,防撞触边采用橡胶材质,防撞触边对车辆及障碍物或者人起到保护作用,避免车辆在移动时直接与外部发生碰撞,防撞触边受挤压后传递信号给控制系统,通过控制系统停止车辆运动。。
作为优选,所述车架的侧面对称开设有透气孔。
采用上述技术方案,透气孔方便空气流通,可以方便车架内部的热量散出,延长使用寿命。
作为优选,所述万向轮和驱动轮上固定设有耐磨层。
采用上述技术方案,所述耐磨层采用聚氨酯,具有较强的耐磨性,延长使用寿命,且具有较强的摩擦力,避免打滑,实用性强。
作为优选,所述安装板上端面对称且固定设置有三角块,所述三角块与承接杆侧面固定连接。
采用上述技术方案,三角块起到加强作用,使得安装板和承接杆之间的连接更加稳定。
附图说明
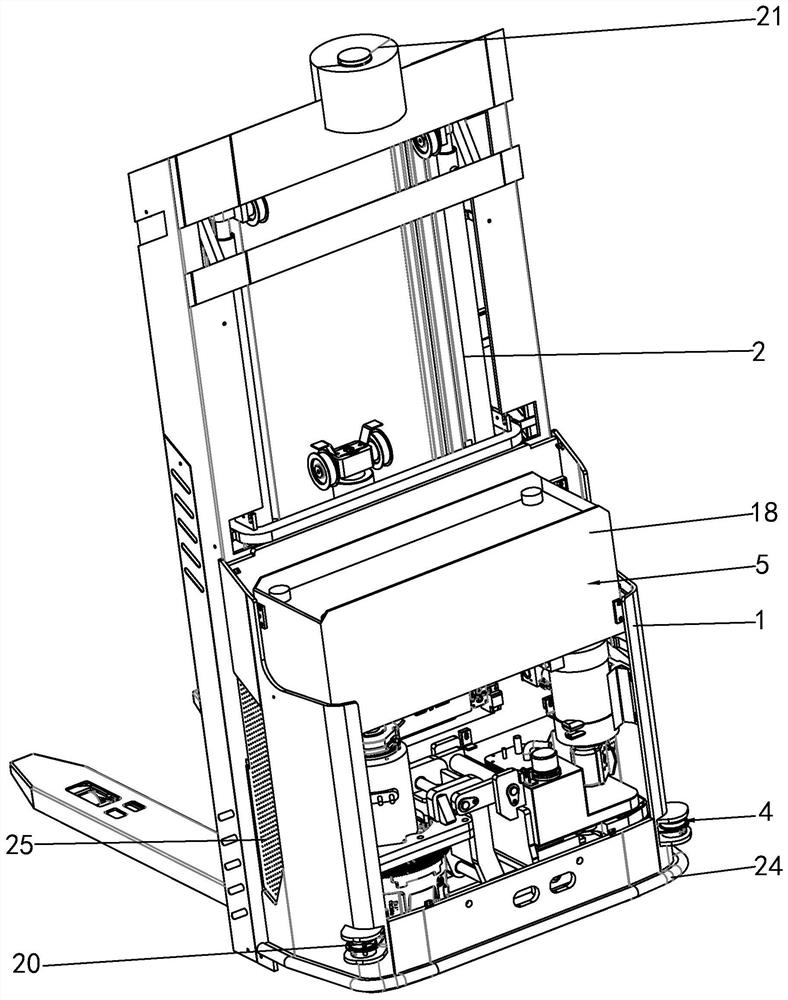
图1为实施例的结构示意图;
图2为实施例用于展示车架内部的位置示意图;
图3为实施例用于展示缓冲组件的结构示意图。
附图标记:1、车架;2、门架系统;3、工作驱动系统;4、导向组件;5、控制组件;6、连接固定座;7、连杆;8、承接杆;9、支撑杆;10、支撑板;11、万向轮;12、缓冲组件;13、安装板;14、行走驱动总成;15、驱动轮;16、缓冲板;17、缓冲垫;18、锂电池;19、控制器;20、避障雷达;21、激光导航雷达;22、销轴一;23、销轴二;24、防撞触边;25、透气孔;26、耐磨层;27、三角块。
具体实施方式
以下所述仅是本发明的优选实施方式,保护范围并不仅局限于该实施例,凡属于本发明思路下的技术方案应当属于本发明的保护范围。同时应当指出,对于本技术领域的普通技术人员而言,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
见图1至3所示,一种具有高稳定性的智能叉车,包括车架1,车架1的侧面对称开设有透气孔25,透气孔25方便空气流通,可以方便车架1内部的热量散出,延长使用寿命,车架1顶部固定设置有控制组件5,控制组件5包括的锂电池18和控制器19,锂电池18固定在车架1的顶部,控制器19位于锂电池18一侧,且控制器19与车架1固定连接,控制器19与锂电池18电性配合,控制器19与行走驱动总成14电性连接,车架1的外侧面设置有导向组件4,导向组件4包括避障雷达20和激光导航雷达21,避障雷达20对称布置在车架1的两侧侧面,避障雷达20与控制组件5电性连接,激光导航雷达21固定在门架系统2的上端面,且激光导航雷达21与控制组件5电性连接。
使用时,锂电池18为激光导航雷达21进行供电,控制器19控制激光导航雷达21起到,激光导航雷达21起到导航作用,使得整体设备跟随规定的路线进行行走, 激光导航雷达21对外部进行规划,将规划完成后的路线反馈给控制器19。
车架1内部对称且固定设置有连接固定座6,连接固定座6的一侧转动设置有连杆7,连杆7的一端转动设置有承接杆8,承接杆8的一端转动连接有支撑杆9,两个承接杆8之间设置有销轴一22,销轴一22穿过连杆7和承接杆8,支撑杆9的一侧设置有销轴二23,销轴二23穿过承接杆8和支撑杆9,销轴一22和销轴二23起到连接作用,将两个承接杆8连接为整体提高整体的强度,支撑杆9与连接固定座6的另一端转动配合,支撑杆9的一端固定连接有支撑板10,支撑板10底部固定设置有万向轮11,万向轮11穿过车架1底部,承接杆8的一端固定连接有安装板13,安装板13上端面对称且固定设置有三角块27,三角块27与承接杆8侧面固定连接,三角块27起到稳定作用,使得安装板13和承接杆8之间的连接更加稳定,安装板13上穿设有行走驱动总成14,行走驱动总成14与控制组件5电性连接,行走驱动总成14与安装板13固定连接,行走驱动总成14的输出端固定连接有驱动轮15,驱动轮15穿过连接固定座6底部。
控制器19收到反馈启动行走驱动总成14,行走驱动总成14带动驱动轮15转动,驱动轮15与万向轮11配合起到平衡作用,万向轮11和驱动轮15上固定设有耐磨层26,耐磨层26采用橡胶材质,具有较强的耐磨性,延长使用寿命,且具有较强的摩擦力,避免打滑,实用性强,通过驱动轮15带动车架1进行移动,车架1带动门架系统2移动,同时行走驱动总成14可以控制驱动轮15的转向作业,从而控制整体转向,避障雷达20的一侧设置有防撞触边24,防撞触边24与车架1的外侧面固定连接,防撞触边24采用橡胶材质,防撞触边24对车架1起到保护作用,避免车架1在移动时直接与外部发生碰撞,防撞触边对车辆及障碍物或者人起到保护作用,避免车辆在移动时直接与外部发生碰撞,防撞触边受挤压后传递信号给控制系统,通过控制系统停止车辆运动,控制器19控制避障雷达20起到躲避路线上的障碍的功能,保证整体的安全性。
车架1的前端固定连接有用于叉货的门架系统2,车架1内部设置有用于驱动门架系统2的工作驱动系统3,门架系统2移动至产品的下方,控制组件5启动工作驱动系统3,工作驱动系统3为门架系统2提供动力,使得门架系统2上升,门架系统2上升带动产品上升,从而起到搬运产品的作用。
当遇到坑洼路段时,万向轮11与驱动轮15之间的平衡打破,万向轮11被顶起,万向轮11带动支撑板10移动,支撑板10带动支撑杆9移动,由于支撑杆9、连接固定座6、连杆7和承接杆8形成平行四边形结构,且连接固定座6固定连接,使得支撑杆9靠近支撑板10的一端向运动时,支撑杆9靠近承接杆8的一端向下运动,连杆7起到稳定作用避免承接杆8翻转,从而使得承接杆8带动安装板13向下运动,安装板13带动行走驱动总成14向下运动,行走驱动总成14带动驱动轮15向下运动,从而保证整体的平衡性。
支撑板10的上端面设置有与连接固定座6固定连接的缓冲组件12,使得且在支撑板10向上运动时,支撑板10会作用在缓冲组件12上,缓冲组件12对支撑板10起到缓冲作用,从而对万向轮11起到缓冲作用,缓冲组件12包括缓冲板16和缓冲垫17,缓冲板16位于支撑板10的上端,且缓冲板16与连接固定座6固定连接,缓冲垫17位于缓冲板16与支撑板10之间,缓冲垫17与缓冲板16固定连接。
支撑板10向上运动时,支撑板10会作用在缓冲垫17上,缓冲垫17采用橡胶材质,具有良好的弹性和耐磨性,当支撑板10作用在缓冲垫17上时,缓冲垫17发生形变,产生复位力,从而起到缓冲作用,同时高耐磨性可以延长缓冲垫17的使用寿命,同时缓冲板16起到支撑和阻挡作用。
- 一种具有高稳定性的智能叉车
- 一种高稳定性AGV智能叉车