爬索机器人
文献发布时间:2023-06-19 12:04:09
技术领域
本公开涉及索道检测技术领域,尤其涉及一种爬索机器人。
背景技术
中国基础建设的发展,很多城市跨度比较大的桥梁、跨河、跨山的桥梁都采用斜拉索的形式,拉索的保护涂层是保护钢筋的重要材料,其破损后会使得钢筋有氧化、破损甚至断裂的风险,由于养护的需要,经常要检查其外观的完整性,目前的检测手段一种是专业人员吊装的方式上去目测,一种是爬索机器人。人工的成本很高,而且危险性极高;所以多采用爬索机器人,但是斜拉索上有的是有螺旋状的有护套线缆,有的会有粗细变化,现有的爬索机器人无法适应各种情况。
发明内容
有鉴于此,本公开提出了一种爬索机器人,包括:第一支撑架、第二支撑架、主动轮驱动装置、主动轮组件、从动轮组件和变径装置;
所述第一支撑架和所述第二支撑架均呈弧形,且所述第一支撑架的一端与所述第二支撑架的一端活动连接,以使所述第一支撑架和所述第二支撑架围设成能够环绕斜拉索的开口结构;
所述主动轮驱动装置和所述主动轮组件均设置在所述第一支撑架上;
所述主动轮驱动装置的输出轴与所述主动轮组件中的主动轮固定连接;
所述从动轮组件安装在所述第二支撑架上;
所述从动轮组件中的从动轮与所述主动轮相对设置,以使所述从动轮与所述主动轮分别位于所述斜拉索的两侧并夹住所述斜拉索;
所述变径装置固定安装在所述第二支撑架上;
所述变径装置包括调节部、变径轴和固定架;
所述变径轴安装在所述固定架上;
所述固定架固定安装在所述第二支撑架上;
所述变径轴穿过所述固定架并与所述固定架转动连接;
所述变径轴的一端与所述调节部固定连接;
所述从动轮组件移动安装在所述变径轴上,在所述调节部的作用下能够在所述变径轴上水平移动,以调节所述从动轮组件与所述主动轮之间的距离。
在一种可能的实现方式中,所述调节部包括变径转盘;
所述变径轴的一端与所述变径转盘的中心处固定连接;且
所述变径轴与所述变径转盘垂直;
所述变径轴与所述从动轮组件螺纹配合。
在一种可能的实现方式中,所述变径装置还包括调节手柄;
所述调节手柄插设在所述变径转盘的盘体上;
还包括固定盘;
所述固定盘的盘面与所述变径转盘的盘面平行设置;
所述变径轴的一端穿过所述固定盘的中心,并固定连接至所述变径转盘的中心位置处;
其中,所述固定盘的盘面上开设有多个固定孔;
各所述固定孔分散设置在所述固定盘的盘面上,且各所述固定孔均与所述调节手柄相匹配,以通过所述调节手柄插入所述固定孔中对所述变径转盘进行固定。
在一种可能的实现方式中,所述从动轮组件包括从动轮平台和所述从动轮;
所述从动轮平台呈板状;
所述从动轮平台设置有从动轮安装板;
所述从动轮通过轴安装在所述从动轮安装板上;
所述从动轮平台的中心处设置有连接部;
所述连接部移动安装在所述变径轴上。
在一种可能的实现方式中,还包括主轴;
所述第一支撑架和所述第二支撑架均为双层结构;
所述第一支撑架包括第一法兰盘和第二法兰盘;
所述第二支撑架包括第三法兰盘和第四法兰盘;
所述第一法兰盘、所述第二法兰盘、所述第三法兰盘和所述第四法兰盘均呈圆弧型;
所述第一法兰盘的一端与所述第三法兰盘的一端铰接在所述主轴的一端;
所述第三法兰盘的一端与所述第四法兰盘的一端铰接在所述主轴的另一端。
在一种可能的实现方式中,还包括自动锁紧装置;
所述自动锁紧装置包括锁紧支撑法兰架、锁紧动态法兰架、连接杆和锁紧电机;
所述锁紧支撑法兰架竖直设置在所述第一法兰盘与所述第二法兰盘之间;
所述锁紧动态法兰架竖直设置在所述第三法兰盘与所述第四法兰盘之间;
所述连接杆横向安装在所述锁紧支撑法兰架与所述锁紧动态法兰架之间;
其中,所述连接杆的一端穿设在所述锁紧支撑法兰架中,并与所述锁紧电机的输出轴固定连接;
所述连接杆的另一端穿设在所述锁紧动态法兰架中;
所述连接杆与所述锁紧动态法兰架可移动连接,以使所述锁紧电机驱动所述连接杆带动所述锁紧动态法兰架在所述连接杆上移动。
在一种可能的实现方式中,所述连接杆为锁紧丝杠;
所述锁紧支撑法兰架和所述锁紧动态法兰架均为杆状;
所述锁紧丝杠与所述锁紧动态法兰架螺接。
在一种可能的实现方式中,所述主动轮组件包括所述主动轮、主动轴、主动轴支撑板;
所述主动轴支撑板呈“U”型;
所述主动轴位于所述主动轴支撑板的U型槽内,并与所述主动轴支撑板的侧板转动连接;
所述主动轴上设置有所述主动轮;
所述主动轮驱动装置的输出轴与所述主动轴固定连接。
在一种可能的实现方式中,还包括压力传感器;
所述主动轴支撑板的底部设置有主支撑板;
所述主支撑板为“U”型;
所述压力传感器安装在所述主动轴支撑板和所述主支撑板之间;
所述压力传感器与所述主动轴支撑板抵接,用于监测所述主动轮对所述斜拉索的压力值。
在一种可能的实现方式中,还包括测距轮;
所述测距轮设置在所述第一支撑架上,用于在爬索时沿所述斜拉索的侧壁转动。
通过包括第一支撑架、第二支撑架、主动轮驱动装置、主动轮组件、从动轮组件和变径装置,第一支撑架和第二支撑架均呈弧形,且第一支撑架的一端与第二支撑架的一端活动连接,以使第一支撑架和第二支撑架围设成能够环绕斜拉索的开口结构,主动轮驱动装置和主动轮组件均设置在第一支撑架上,主动轮驱动装置的输出轴与主动轮组件中的主动轮固定连接,从动轮组件安装在第二支撑架上,从动轮组件中的从动轮与主动轮相对设置,以使从动轮与主动轮分别位于斜拉索的两侧并夹住斜拉索,变径装置固定安装在第二支撑架上,变径装置包括调节部、变径轴和固定架,变径轴安装在固定架上,固定架固定安装在第二支撑架上,变径轴穿过固定架并与固定架转动连接调节部与变径轴的一端固定连接,从动轮组件移动安装在变径轴上,在调节部的作用下能够在变径轴上水平移动,以调节从动轮组件与主动轮之间的距离。从而在爬升后高空作业时不会发生脱落、滑落等安全风险事故,提高了安全性能。
根据下面参考附图对示例性实施例的详细说明,本公开的其它特征及方面将变得清楚。
附图说明
包含在说明书中并且构成说明书的一部分的附图与说明书一起示出了本公开的示例性实施例、特征和方面,并且用于解释本公开的原理。
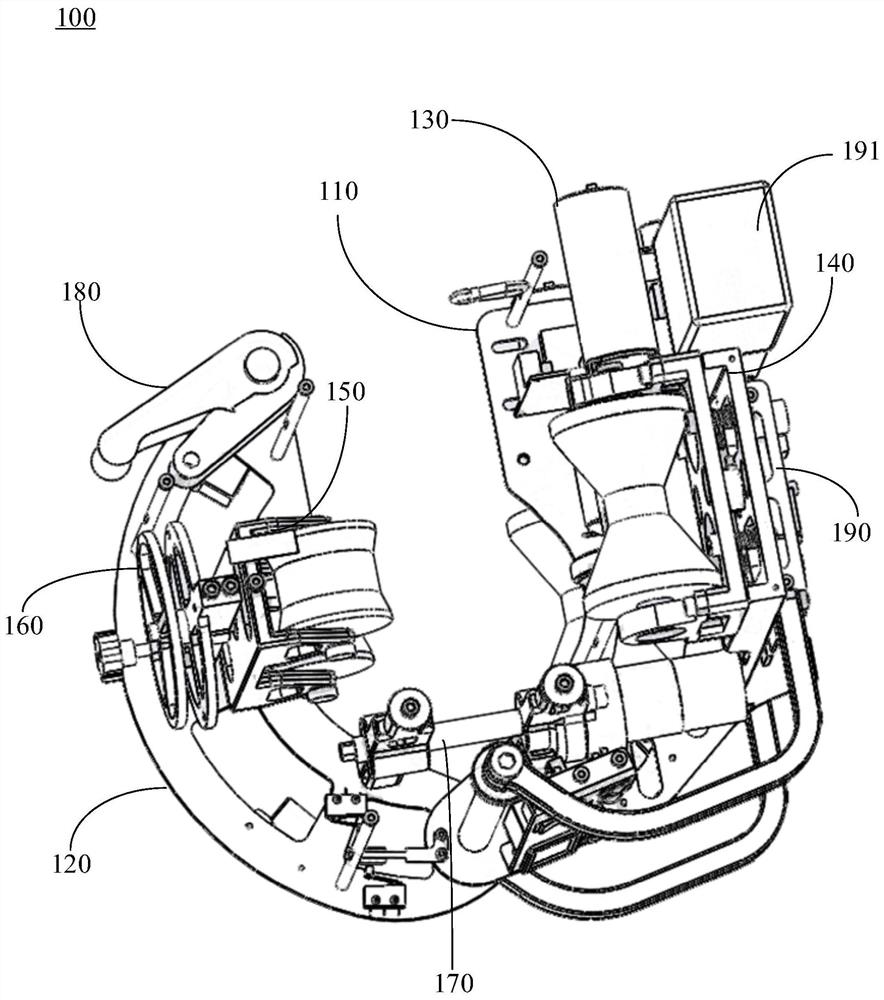
图1示出本公开实施例的爬索机器人的示意图;
图2示出本公开实施例的爬索机器人的变径装置的结构示意图;
图3示出本公开实施例的爬索机器人的自动锁紧装置的结构示意图;
图4示出本公开实施例的爬索机器人的压力传感器的结构示意图。
具体实施方式
以下将参考附图详细说明本公开的各种示例性实施例、特征和方面。附图中相同的附图标记表示功能相同或相似的元件。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。
另外,为了更好的说明本公开,在下文的具体实施方式中给出了众多的具体细节。本领域技术人员应当理解,没有某些具体细节,本公开同样可以实施。在一些实例中,对于本领域技术人员熟知的方法、手段、元件和电路未作详细描述,以便于凸显本公开的主旨。
图1示出根据本公开一实施例的爬索机器人100的示意图。如图1所示,该爬索机器人100包括:
第一支撑架110、第二支撑架120、主动轮141a驱动装置130、主动轮组件140、从动轮组件150和变径装置160,第一支撑架110和第二支撑架120均呈弧形,且第一支撑架110的一端与第二支撑架120的一端活动连接,以使第一支撑架110和第二支撑架120围设成能够环绕斜拉索的开口结构,主动轮141a驱动装置130和主动轮组件140均设置在第一支撑架110上,主动轮141a驱动装置130的输出轴与主动轮组件140中的主动轮141a固定连接,从动轮组件150安装在第二支撑架120上,从动轮组件150中的从动轮152与主动轮141a相对设置,以使从动轮152与主动轮141a分别位于斜拉索的两侧并夹住斜拉索,变径装置160固定安装在第二支撑架120上,变径装置160包括调节部161、变径轴162和固定架165,变径轴162安装在固定架165上,固定架165固定安装在第二支撑架120上,变径轴162穿过固定架165并与固定架165转动连接,调节部161与变径轴162的一端固定连接,从动轮组件150移动安装在变径轴162上,在调节部161的作用下能够在变径轴162上水平移动,以调节从动轮组件150与主动轮141a之间的距离。
通过包括第一支撑架110、第二支撑架120、主动轮驱动装置130、主动轮组件140、从动轮组件150和变径装置160,第一支撑架110和第二支撑架120均呈弧形,且第一支撑架110的一端与第二支撑架120的一端活动连接,以使第一支撑架110和第二支撑架120围设成能够环绕斜拉索的开口结构,主动轮驱动装置130和主动轮组件140均设置在第一支撑架110上,主动轮驱动装置130的输出轴与主动轮组件140中的主动轮141a固定连接,从动轮组件150安装在第二支撑架120上,从动轮组件150中的从动轮152与主动轮141a相对设置,以使从动轮152与主动轮141a分别位于斜拉索的两侧并夹住斜拉索,变径装置160固定安装在第二支撑架120上,变径装置160包括调节部161、变径轴162和固定架165,变径轴162安装在固定架165上,固定架165固定安装在第二支撑架120上,变径轴162穿过固定架165并与固定架165转动连接,调节部161与变径轴162的一端固定连接,从动轮组件150移动安装在变径轴162上,在调节部161的作用下能够在变径轴162上水平移动,以调节从动轮组件150与主动轮141a之间的距离。从而在爬升后高空作业时不会发生脱落、滑落等安全风险事故,提高了安全性能。
具体的,参见图1,在一种可能的实现方式中,变径装置160包括调节部161、变径轴162和固定架165,调节部161与变径轴162的一端连接,从动轮组件150可移动安装在变径轴162上,调节部161用于调节变径轴162以改变从动轮组件150与主动轮141a之间的距离。举例来说,固定架165为长方体,变径轴162为变径轴162,固定架165固定安装在第二支撑架120上,固定架165的中心处开设有通孔,通孔中设置有第一轴承,变径轴162的一端穿设在第一轴承中和变径转盘的中心处,且变径轴162与变径转盘垂直,变径轴162的另一端开设有螺纹,从动轮组件150开设有第一螺孔,变径轴162与从动轮组件150螺纹配合。在使用时,手动转动变径转盘,变径转盘带动变径轴162,变径轴162在轴承中旋转,轴承旋转时与从动轮组件150配合,以使从动轮组件150远离或靠近变径转盘,从而使得从动轮152靠近或远离主动轮141a,以调整从动轮152与主动轮141a之间的距离,这样,可以适应不同直径的斜拉索。
进一步的,参见图1,在一种可能的实现方式中,变径装置160还包括调节手柄163,调节手柄163插设在变径转盘的盘面上,调节手柄163包括杆体和手柄,手柄与杆体的一端固定连接,固定架165为长方型,固定架165上设置有固定盘164,变径轴162穿设在固定盘164的中心处,且固定盘164的盘面与变径转盘的盘面平行设置,固定盘164的盘面上开设有固定孔,变径转盘的盘面上开设有与固定孔相匹配的插接孔,杆体插设在固定孔与插接孔中,以使变径转盘的位置固定。举例来说,杆体为螺杆,固定孔和插接孔均开设有螺纹,杆体与变径转盘通过插接孔螺接,杆体与固定盘164通过固定孔螺接。示例性的,插接孔为一个,固定孔为四个,四个固定孔等间隔设置,变径转盘与固定盘164的面积相同,且插接孔位于所述变径转盘的边缘,固定孔均位于固定盘164的边缘,这样可以使插接孔与固定孔对应,转动变径转盘,使从动轮152与主动轮141a之间的距离调整到合适的距离,从而能夹住斜拉索,将杆体与变径转盘和固定盘164螺接,从而固定从动轮152与主动轮141a之间的距离。
需要说明的是,杆体可以通过螺纹连接的方式旋接到变径转盘的盘体中,也可以通过其他方式与变径转盘的盘体相连接,此处不进行具体限定。
在另一种可能的实现方式中,固定孔为多个,杆体上设置有弹簧卡扣,转动变径转盘,使从动轮152与主动轮141a之间的距离调整到合适的距离,从而能夹住斜拉索,接着将杆体插入插接孔,并将杆体插入与插接孔相对的固定孔。其中,在插入杆体的时候,弹簧卡扣先是被下压,以使杆体可以插入插接孔或固定孔,然后在通过插接孔或固定孔后,弹簧卡扣弹出以固定所述变径转盘。
进一步的,参见图2,在一种可能的实现方式中,第一支撑架110和第二支撑架120均为双层结构,第一支撑架110包括第一法兰盘111和第二法兰盘112,第二支撑架120包括第三法兰盘121和第四法兰盘122,第一法兰盘111、第二法兰盘112、第三法兰盘121和第四法兰盘122均呈圆弧型,第一法兰盘111的一端与第三法兰盘121的一端铰接在主轴110a的一端,第三法兰盘121的一端与第四法兰盘122的一端铰接在主轴110a的另一端。举例来说,第一法兰盘111、第二法兰盘112、第三法兰盘121和第四法兰盘122均为不锈钢材料,第一法兰盘111和第三法兰盘121在主轴110a的一端铰接,第三法兰盘121的一端与第四法兰盘122的一端铰接在主轴110a的另一端,且第一法兰盘111和第二法兰盘112之间还设置有第一支撑柱,第三法兰盘121和第四法兰盘122之间设置有第二支撑柱,这样使得第一法兰盘111和第二法兰盘112的相对位置固定,主动轮组件140架设在第一法兰盘111与第二法兰盘112的内弯部,同样的,第三法兰盘121和第四法兰盘122的相对位置固定,从动轮组件150架设在第三法兰盘121与第四法兰盘122的内弯部,这样使从动轮152与主动轮141a相对设置。
进一步的,参见图3,在一种可能的实现方式中,爬索机器人100还包括自动锁紧装置170,自动锁紧装置170包括锁紧支撑法兰架171、锁紧动态法兰架172、连接杆173和锁紧电机174,锁紧支撑法兰架171设置在第一法兰盘111与第二法兰盘112之间,锁紧动态法兰架172设置在第三法兰盘121与第四法兰盘122之间,连接杆173的一端与锁紧电机174的输出轴固定连接,且连接杆173与锁紧支撑法兰架171固定连接,连接杆173与锁紧动态法兰架172可移动连接,以使连接杆173在锁紧电机174带动下改变锁紧动态法兰架172在连接杆173上的位置。举例来说,连接杆173为锁紧丝杠,锁紧支撑法兰架171和锁紧动态法兰架172均为杆状,锁紧支撑法兰架171上设置有第二轴承,锁紧丝杠穿设在第二轴承中,锁紧动态法兰架172开设有第二螺孔,锁紧丝杠与锁紧动态法兰架172螺接。也就是说,锁紧支撑法兰架171支撑第一法兰盘111与第二法兰盘112,锁紧动态法兰架172支撑第三法兰盘121与第四法兰盘122,丝杠穿过锁紧支撑法兰架171与锁紧动态法兰架172,且丝杠与锁紧支撑法兰架171轴承连接,丝杠与锁紧动态法兰架172螺接,这样锁紧电机174可以带动丝杠转动,以使丝杠在锁紧支撑法兰架171中转动,且使锁紧动态法兰架172移动,锁紧动态法兰架172带动第三法兰盘121与第四法兰盘122移动,第一法兰盘111、第二法兰盘112、第三法兰盘121和第四法兰盘122均为不锈钢材料,第一法兰盘111和第三法兰盘121在主轴110a的一端铰接,第三法兰盘121的一端与第四法兰盘122的一端铰接在主轴110a的另一端,且第一法兰盘111和第二法兰盘112之间还设置有第一支撑柱,第三法兰盘121和第四法兰盘122之间设置有第二支撑柱,这样使得第一法兰盘111和第二法兰盘112的相对位置固定,主动轮组件140架设在第一法兰盘111与第二法兰盘112的内弯部,同样的,第三法兰盘121和第四法兰盘122的相对位置固定,从动轮组件150架设在第三法兰盘121与第四法兰盘122的内弯部,这样使从动轮152与主动轮141a相对设置,通过自动锁紧装置170微调主动轮141a与从动轮152之间的距离。
进一步的,参见图1,在一种可能的实现方式中,从动轮组件150包括从动轮平台151和从动轮152,从动轮平台151呈板状,从动轮平台151设置有从动轮152安装板,从动轮152通过轴安装在从动轮152安装板上,从动轮平台151的中心处设置有连接部,连接部移动安装在变径轴162上。举例来说,从动轮平台151为长方型板状,从动轮平台151的板面上设置有从动轮152安装板,从动轮152安装板为四个,从动轮152安装板为三角形板状,从动轮152安装板的一条边与所述从动轮平台151的板面固定连接,三角形的顶点开设有轴孔,两个从动轮152安装板相对设置,两个从动轮152安装板之间设置有一个从动轮152。
进一步的,参见图4,在一种可能的实现方式中,爬索机器人100还包括压力传感器144,压力传感器144与主动轮组件140抵接,用于监测主动轮141a对斜拉索的压力值。举例来说,主动轮组件140包括主动轴支撑板142,主动轴支撑板142上设置有主动轴141b,主动轴141b上设置有主动轮141a,主动轴支撑板142后设置有主支撑板143,压力传感器144安装在主动轴支撑板142和主支撑板143之间,压力通过主动轴141b传递到主动轴支撑板142,再作用在压力传感器144上。在系统调教的时候确定最适合爬升的压力,例如此压力为15N,在初始状态下锁紧装置把整个设备以15N的压力锁紧在斜拉索上,在爬升或下降的过程中由于斜拉索直径的变化或者障碍物的影响,会使得压力发生变化,在压力变化出阈值范围(阈值范围为14.5N~15.5N)时,调整锁紧电机174,使得压力重新回到15N,从而实现自适应功能。
进一步的,参见图1,在一种可能的实现方式中,爬索机器人100还包括测距轮,测距轮设置在第一支撑架110上,用于在爬索时沿斜拉索的侧壁转动。采用光电编码器,根据测距轮的直径和每圈输出的编码数量,确定整个系统爬升和下降的距离,用于记录测量数据的位置信息。
需要说明的是,光电编码器进行测距可以使用本领据的常规技术手段,此处不再进行赘述。
进一步的,参见图1,在一种可能的实现方式中,爬索机器人100还包括保险装置180,保险装置180采用棘轮形式,确保在未打开保险的情况下,只能单向锁紧系统。保险装置180设置在第一支撑架110和第二支撑架120未铰接的一端。
需要说明的是,保险装置180可以使用棘轮也可以使用其他方式,本申请不进行限定。
进一步的,参见图1,在一种可能的实现方式中,爬索机器人100还包括电池和控制电路板190,电池用于向压力传感器144、光电编码器、主动轮141a驱动装置130、锁紧电机174、控制电路板190进行供电。举例来说,电池安装在电池盒191中,电池盒191设置在第一支撑架110上。电路板190设置在主支撑板143后,并且通过两根弯钩型的安装杆挂在主轴110a上,在拆卸电路板190时,打开固定电路板190的固定卡扣,使安装杆带动电路板190沿主轴110a进行旋转,以使可以取下电路板190,这样的拆卸安装方式方便维护。
进一步的,参见图1,在一种可能的实现方式中,爬索机器人100还可以包括摄像头和磁涡流传感器,用于对斜拉索的外观和钢筋索的检测。可以使用本领域的常规技术手段,此处不再进行赘述。
需要说明的是,尽管以上述各个实施例作为示例介绍了爬索机器人100如上,但本领域技术人员能够理解,本公开应不限于此。事实上,用户完全可根据个人喜好和/或实际应用场景灵活设定爬索机器人100,只要达到所需功能即可。
这样,通过包括第一支撑架110、第二支撑架120、主动轮141a驱动装置130、主动轮组件140、从动轮组件150和变径装置160,第一支撑架110和第二支撑架120均呈弧形,且第一支撑架110的一端与第二支撑架120的一端活动连接,以使第一支撑架110和第二支撑架120围设成能够环绕斜拉索的开口结构,主动轮141a驱动装置130和主动轮组件140均设置在第一支撑架110上,主动轮141a驱动装置130的输出轴与主动轮组件140中的主动轮141a固定连接,从动轮组件150安装在第二支撑架120上,从动轮组件150中的从动轮152与主动轮141a相对设置,以使从动轮152与主动轮141a分别位于斜拉索的两侧并夹住斜拉索,变径装置160固定安装在第二支撑架120上,变径装置160包括调节部161、变径轴162和固定架165,变径轴162安装在固定架165上,固定架165固定安装在第二支撑架120上,变径轴162穿过固定架165并与固定架165转动连接,调节部161与变径轴162的一端固定连接,从动轮组件150移动安装在变径轴162上,在调节部161的作用下能够在变径轴162上水平移动,以调节从动轮组件150与主动轮141a之间的距离。从而在爬升后高空作业时不会发生脱落、滑落等安全风险事故,提高了安全性能。
以上已经描述了本公开的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。本文中所用术语的选择,旨在最好地解释各实施例的原理、实际应用或对市场中的技术改进,或者使本技术领域的其它普通技术人员能理解本文披露的各实施例。
- 一种基于负重切换机制的斜拉索机器人爬索系统与方法
- 带检测系统的轻型碳纤维爬索机器人及其用于拉索检测的方法