一种功率适配器电子元件焊接机械手臂
文献发布时间:2023-06-19 12:08:44
技术领域
本发明涉及激光焊接设备技术领域,具体为一种功率适配器电子元件焊接机械手臂。
背景技术
随著3C数码产品的广泛普及和使用,3C产品正朝着高度集成化的方向发展,其内部的电子元器件的体积越来越小,对焊接技术的要求越来越高。
然而传统的手工焊和波峰焊有着多种多样的不足和缺点,手工焊接需要大量的人员进行长时间的焊接,生产效率低,质量参差不齐,产品一致性难以保证;同时电子元件需要在焊接的过程中保证其表面清洁性,若人工手动拿取很容易对其表面造成污染,从而影响到该电子元件的后期使用,所以急需要一种能够缓解上述问题的方案。
发明内容
本发明的目的在于提供一种功率适配器电子元件焊接机械手臂,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种功率适配器电子元件焊接机械手臂,包括工作台,所述工作台的上端靠近后端设置有焊接机构,所述焊接机构包括固定基台、第一活动支撑板、伸缩杆、气缸、固定滑槽杆、活动齿槽滑杆、转动齿轮、转动连杆、第一电机、第二活动支撑板、第二电机、螺纹杆、定位轴承块、活动滑动块和第一固定滑杆,所述工作台的上端靠近后端设置有固定基台,所述固定基台的上端开设有滑槽,所述固定基台的上端滑槽内表面靠近前端设置有第一活动支撑板,所述第一活动支撑板的后端设置有伸缩杆,所述伸缩杆的后端固定基台的后侧设置有气缸,所述第一活动支撑板的前端设置有固定滑槽杆,所述固定滑槽杆的内表面设置有活动齿槽滑杆,所诉活动齿槽滑杆的上端齿槽的上端设置有转动齿轮,所述转动齿轮的后端设置有转动连杆,所述转动连杆的后端设置有第一电机,所述活动齿槽滑杆的前端设置有第二活动支撑板,所述第二活动支撑板的上端设置有第二电机,所述第二电机的转轴下端设置有螺纹杆,所述螺纹杆的下端第二活动支撑板的前端设置有定位轴承块,所述螺纹杆的外表面中间区域设置有活动滑动块,所述活动滑动块的后端靠近一端第二活动支撑板的前端设置有第一固定滑杆,所述活动滑动块的前端设置有激光发射器。
优选的,所述固定基台固定安装在工作台的上端,所述第一活动支撑板的下端与固定基台的上端滑动连接,所述伸缩杆的前端与第一活动支撑板的后端固定连接,所述伸缩杆的后端贯穿固定基台的后端与气缸的前端活动伸缩连接,所述气缸安装在固定基台的后侧。
优选的,所述固定滑槽杆的后端与第一活动支撑板的前端中间区域固定连接,所述活动齿槽滑杆的外表面与固定滑槽杆的内表面滑动连接,所述转动齿轮的外表面与活动齿槽滑杆的上端前端齿槽啮齿连接,所述转动连杆的前端与转动齿轮的后端固定连接,所述转动连杆的后端贯穿第一活动支撑板的前后端与第一电机的前端转轴固定连接。
优选的,所述第一电机安装在第一活动支撑板的后侧,所述活动齿槽滑杆的前端与第二活动支撑板的后端固定连接,所述第二电机安装在第二活动支撑板的上端中间区域,所述第二电机的转轴贯穿第二活动支撑板的上端与螺纹杆的上端固定连接,所述螺纹杆的下端与定位轴承块的上端活动连接。
优选的,所述定位轴承块的后端与第二活动支撑板的前端靠近下端固定连接,所述螺纹杆的外表面贯穿活动滑动块的上下端且贯穿面之间螺纹连接,所述第一固定滑杆固定安装在第二活动支撑板的前端靠近一端区域,所述第一固定滑杆的外表面与活动滑动块的后端靠近一端滑槽滑动连接,所述激光发射器固定安装在活动滑动块的前端,所述固定滑槽杆、活动齿槽滑杆、定位轴承块和第一固定滑杆均设置有两组。
优选的,所述工作台的上端焊接机构的前侧设置有取料机构,所述取料机构包括支撑柱、固定框、第二固定滑杆、滑套、活动滑杆、从动滑杆、偏心块、转盘、第三电机、吸管和吸嘴,所述工作台的上端焊接机构的前侧设置有支撑柱,所述支撑柱的上端后端设置有固定框,所述固定框的内部靠近后端设置有第二固定滑杆,所述第二固定滑杆的外表面设置有滑套,所述滑套的下端设置有活动滑杆,所述活动滑杆的外表面设置有从动滑杆,所述从动滑杆的前端设置有偏心块,所述偏心块的前端设置有转盘,所述转盘的前端支撑柱的后端中间区域设置有第三电机,所述从动滑杆的后端下端设置有吸管,所述吸管的下端设置有吸嘴。
优选的,所述支撑柱固定安装在工作台的上端焊接机构的前侧区域,所述固定框的前端与支撑柱的上端后端固定连接,所述第二固定滑杆固定安装在固定框的内部靠近后端区域,所述滑套的内表面与第二固定滑杆的外表面活动连接,所述滑套的外表面下端与活动滑杆的上端固定连接。
优选的,所述活动滑杆的外表面贯穿从动滑杆的中间区域且贯穿面之间活动连接,所述从动滑杆的前端与偏心块的后端上端活动连接,所述偏心块的前端下端与转盘的后端边缘固定连接,所述转盘的前端与第三电机的后端转轴固定连接,所述从动滑杆的后端上端开设有通孔,所述吸管的上端与从动滑杆的后端下端接通连接,所述吸嘴固定安装在吸管的下端。
与现有技术相比,本发明的有益效果如下:
使用时,通过启动气缸可以使得伸缩杆向前伸出,推动第一活动支撑板向固定基台的前端进行移动,通过启动第一电机,可以使得转动连杆带动转动齿轮进行定位转动,从而使得活动齿槽滑杆在固定滑槽杆的内部通过齿槽进行两端滑动,进一步带动第二活动支撑板进行两端滑动,通过启动第二电机,可以使得第二电机的转轴带动螺纹杆进行定位转动,进而使得活动滑动块通过螺纹杆的转动在螺纹杆与第一固定滑杆的外表面进行上下移动,从调节激光发射器的焊接焦距,以便达到最优的焊接效果,此装置结构稳定,其焊接质量稳定可靠,工作效率高,可以减少产品不良率,降低生产成本。
使用时,通过启动第三电机可以带动转盘和偏心块进行局部正反转动,当偏心块转动以后,偏心块的上端前端会带动从动滑杆在活动滑杆的外表面上下进行运动,通过从动滑杆的上下运动以及偏心块的转动会带动滑套在第二固定滑杆的外表面进行滑动,当从动滑杆在活动滑杆的外表面上下滑动的过程中,从动滑杆的后端下端会带动吸管和吸嘴进行同步上升下降,当吸嘴下降到第二固定滑杆的一端最下侧工作台的上端时,通过抽真空会将电子元件吸附,从而运送到第二固定滑杆的另一端最下侧工作台的上端,通过焊接机构的配合进行焊接,此装置利用机械手装置放置电子元件代替人工手动放置,可以进一步减少电子元件表面脏污,提高其焊接质量。
附图说明
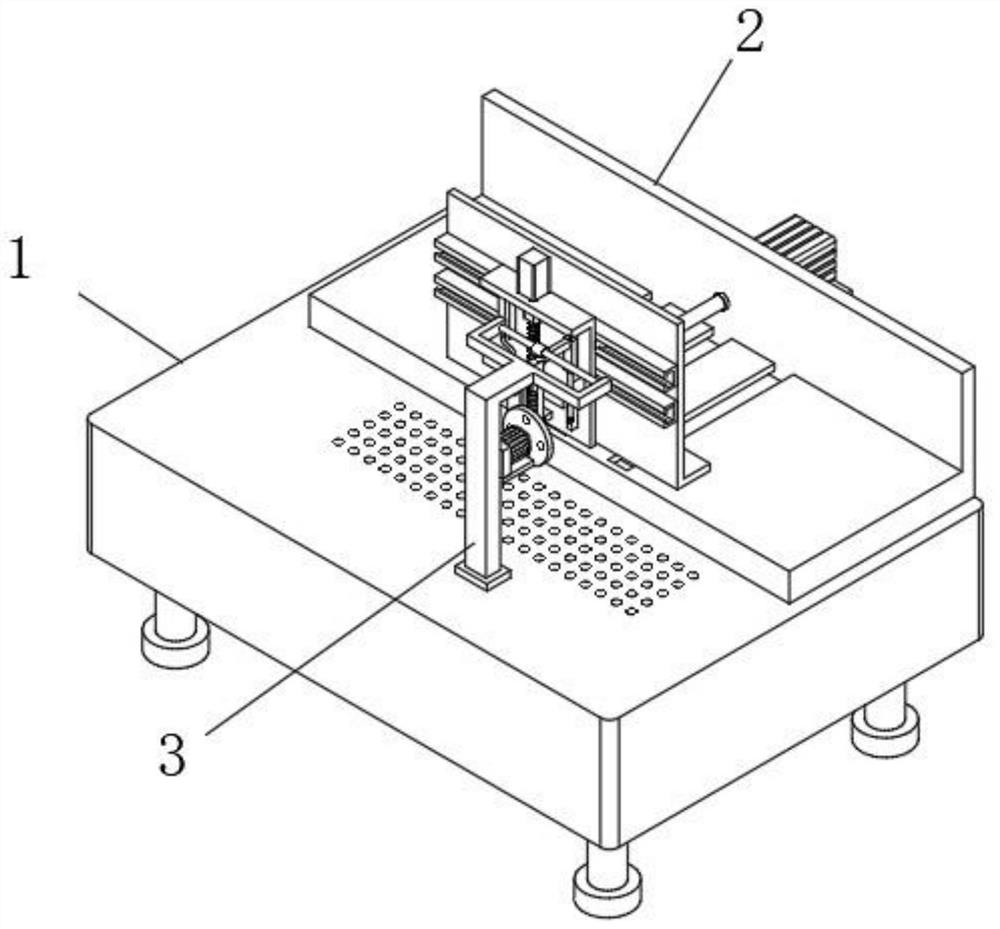
图1为本发明的整体结构示意图;
图2为本发明的焊接机构正面结构示意图;
图3为本发明的焊接机构侧面结构示意图;
图4为本发明的焊接机构侧面结构示意图;
图5为本发明的A部放大结构示意图;
图6为本发明的取料机构正面结构示意图;
图7为本发明的取料机构反面结构示意图。
图中:1、工作台;2、焊接机构;3、取料机构;4、激光发射器;201、固定基台;202、第一活动支撑板;203、伸缩杆;204、气缸;205、固定滑槽杆;206、活动齿槽滑杆;207、转动齿轮;208、转动连杆;209、第一电机;210、第二活动支撑板;211、第二电机;212、螺纹杆;213、定位轴承块;214、活动滑动块;215、第一固定滑杆;301、支撑柱;302、固定框;303、第二固定滑杆;304、滑套;305、活动滑杆;306、从动滑杆;307、偏心块;308、转盘;309、第三电机;310、吸管;311、吸嘴。
具体实施方式
下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为的方位或位置的相对关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
请参阅图1-7,本发明提供的一种实施例:一种功率适配器电子元件焊接机械手臂,包括工作台1,工作台1的上端靠近后端设置有焊接机构2,焊接机构2包括固定基台201、第一活动支撑板202、伸缩杆203、气缸204、固定滑槽杆205、活动齿槽滑杆206、转动齿轮207、转动连杆208、第一电机209、第二活动支撑板210、第二电机211、螺纹杆212、定位轴承块213、活动滑动块214和第一固定滑杆215,工作台1的上端靠近后端设置有固定基台201,固定基台201的上端开设有滑槽,固定基台201的上端滑槽内表面靠近前端设置有第一活动支撑板202,第一活动支撑板202的后端设置有伸缩杆203,伸缩杆203的后端固定基台201的后侧设置有气缸204,第一活动支撑板202的前端设置有固定滑槽杆205,固定滑槽杆205的内表面设置有活动齿槽滑杆206,所诉活动齿槽滑杆206的上端齿槽的上端设置有转动齿轮207,转动齿轮207的后端设置有转动连杆208,转动连杆208的后端设置有第一电机209,活动齿槽滑杆206的前端设置有第二活动支撑板210,第二活动支撑板210的上端设置有第二电机211,第二电机211的转轴下端设置有螺纹杆212,螺纹杆212的下端第二活动支撑板210的前端设置有定位轴承块213,螺纹杆212的外表面中间区域设置有活动滑动块214,活动滑动块214的后端靠近一端第二活动支撑板210的前端设置有第一固定滑杆215,活动滑动块214的前端设置有激光发射器4。
固定基台201固定安装在工作台1的上端,第一活动支撑板202的下端与固定基台201的上端滑动连接,伸缩杆203的前端与第一活动支撑板202的后端固定连接,伸缩杆203的后端贯穿固定基台201的后端与气缸204的前端活动伸缩连接,气缸204安装在固定基台201的后侧。
固定滑槽杆205的后端与第一活动支撑板202的前端中间区域固定连接,活动齿槽滑杆206的外表面与固定滑槽杆205的内表面滑动连接,转动齿轮207的外表面与活动齿槽滑杆206的上端前端齿槽啮齿连接,转动连杆208的前端与转动齿轮207的后端固定连接,转动连杆208的后端贯穿第一活动支撑板202的前后端与第一电机209的前端转轴固定连接。
第一电机209安装在第一活动支撑板202的后侧,活动齿槽滑杆206的前端与第二活动支撑板210的后端固定连接,第二电机211安装在第二活动支撑板210的上端中间区域,第二电机211的转轴贯穿第二活动支撑板210的上端与螺纹杆212的上端固定连接,螺纹杆212的下端与定位轴承块213的上端活动连接。
定位轴承块213的后端与第二活动支撑板210的前端靠近下端固定连接,螺纹杆212的外表面贯穿活动滑动块214的上下端且贯穿面之间螺纹连接,第一固定滑杆215固定安装在第二活动支撑板210的前端靠近一端区域,第一固定滑杆215的外表面与活动滑动块214的后端靠近一端滑槽滑动连接,激光发射器4固定安装在活动滑动块214的前端,固定滑槽杆205、活动齿槽滑杆206、定位轴承块213和第一固定滑杆215均设置有两组;使用时,通过启动气缸204可以使得伸缩杆203向前伸出,推动第一活动支撑板202向固定基台201的前端进行移动,通过启动第一电机209,可以使得转动连杆208带动转动齿轮207进行定位转动,从而使得活动齿槽滑杆206在固定滑槽杆205的内部通过齿槽进行两端滑动,进一步带动第二活动支撑板210进行两端滑动,通过启动第二电机211,可以使得第二电机211的转轴带动螺纹杆212进行定位转动,进而使得活动滑动块214通过螺纹杆212的转动在螺纹杆212与第一固定滑杆215的外表面进行上下移动,从调节激光发射器4的焊接焦距,以便达到最优的焊接效果,此装置结构稳定,其焊接质量稳定可靠,工作效率高,可以减少产品不良率,降低生产成本。
工作台1的上端焊接机构2的前侧设置有取料机构3,取料机构3包括支撑柱301、固定框302、第二固定滑杆303、滑套304、活动滑杆305、从动滑杆306、偏心块307、转盘308、第三电机309、吸管310和吸嘴311,工作台1的上端焊接机构2的前侧设置有支撑柱301,支撑柱301的上端后端设置有固定框302,固定框302的内部靠近后端设置有第二固定滑杆303,第二固定滑杆303的外表面设置有滑套304,滑套304的下端设置有活动滑杆305,活动滑杆305的外表面设置有从动滑杆306,从动滑杆306的前端设置有偏心块307,偏心块307的前端设置有转盘308,转盘308的前端支撑柱301的后端中间区域设置有第三电机309,从动滑杆306的后端下端设置有吸管310,吸管310的下端设置有吸嘴311。
支撑柱301固定安装在工作台1的上端焊接机构2的前侧区域,固定框302的前端与支撑柱301的上端后端固定连接,第二固定滑杆303固定安装在固定框302的内部靠近后端区域,滑套304的内表面与第二固定滑杆303的外表面活动连接,滑套304的外表面下端与活动滑杆305的上端固定连接。
活动滑杆305的外表面贯穿从动滑杆306的中间区域且贯穿面之间活动连接,从动滑杆306的前端与偏心块307的后端上端活动连接,偏心块307的前端下端与转盘308的后端边缘固定连接,转盘308的前端与第三电机309的后端转轴固定连接,从动滑杆306的后端上端开设有通孔,吸管310的上端与从动滑杆306的后端下端接通连接,吸嘴311固定安装在吸管310的下端;使用时,通过启动第三电机309可以带动转盘308和偏心块307进行局部正反转动,当偏心块307转动以后,偏心块307的上端前端会带动从动滑杆306在活动滑杆305的外表面上下进行运动,通过从动滑杆306的上下运动以及偏心块307的转动会带动滑套304在第二固定滑杆303的外表面进行滑动,当从动滑杆306在活动滑杆305的外表面上下滑动的过程中,从动滑杆306的后端下端会带动吸管310和吸嘴311进行同步上升下降,当吸嘴311下降到第二固定滑杆303的一端最下侧工作台1的上端时,通过抽真空会将电子元件吸附,从而运送到第二固定滑杆303的另一端最下侧工作台1的上端,通过焊接机构2的配合进行焊接,此装置利用机械手装置放置电子元件代替人工手动放置,可以进一步减少电子元件表面脏污,提高其焊接质量。
工作原理:使用时,通过启动气缸(型号:JD25X5)204可以使得伸缩杆203向前伸出,推动第一活动支撑板202向固定基台201的前端进行移动,通过启动第一电机(型号:SC400)209,可以使得转动连杆208带动转动齿轮207进行定位转动,从而使得活动齿槽滑杆206在固定滑槽杆205的内部通过齿槽进行两端滑动,进一步带动第二活动支撑板210进行两端滑动,通过启动第二电机(型号:SC200)211,可以使得第二电机211的转轴带动螺纹杆212进行定位转动,进而使得活动滑动块214通过螺纹杆212的转动在螺纹杆212与第一固定滑杆215的外表面进行上下移动,从调节激光发射器(型号:DP-200ZD)4的焊接焦距,以便达到最优的焊接效果,此装置结构稳定,其焊接质量稳定可靠,工作效率高,可以减少产品不良率,降低生产成本;使用时,通过启动第三电机(型号:SC300)309可以带动转盘308和偏心块307进行局部正反转动,当偏心块307转动以后,偏心块307的上端前端会带动从动滑杆306在活动滑杆305的外表面上下进行运动,通过从动滑杆306的上下运动以及偏心块307的转动会带动滑套304在第二固定滑杆303的外表面进行滑动,当从动滑杆306在活动滑杆305的外表面上下滑动的过程中,从动滑杆306的后端下端会带动吸管310和吸嘴311进行同步上升下降,当吸嘴311下降到第二固定滑杆303的一端最下侧工作台1的上端时,通过抽真空会将电子元件吸附,从而运送到第二固定滑杆303的另一端最下侧工作台1的上端,通过焊接机构2的配合进行焊接,此装置利用机械手装置放置电子元件代替人工手动放置,可以进一步减少电子元件表面脏污,提高其焊接质量。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种功率适配器电子元件焊接机械手臂
- 一种用于大功率适配器的浪涌抑制电路及该大功率适配器