智能花椒采摘装置
文献发布时间:2023-06-19 13:48:08
技术领域
本发明属于农机收割技术领域,具体涉及一种智能花椒采摘装置。
背景技术
花椒是我国广泛种植的一种多用途经济树种,具有易栽培、好管理、用途广、效益高的特点。近年来我国花椒的种植面积迅速扩大,全国花椒面积达2000万亩左右。陕西、四川、甘肃、贵州、河北、山西等省份的多个地区都将花椒种植业打造成为帮助本地农民实现产业脱贫致富的特色项目,成为该区域乡村经济增长的新突破点。但是,花椒因树枝伸展长、带刺以及果实小而使采摘十分困难。同时,花椒收获的农艺要求高,既要不伤芽、不伤果,又要适时收获,进一步增加了花椒采摘收获的难度。目前,虽然出现了化学药剂喷洒、高枝剪切、机械振动等花椒采收方法,但大都存在采摘效率低、花椒果实损伤较大等问题,市场推广不好。所以,我国现有的花椒收获方式主要采用传统的人工采摘,劳动强度大、效率低、采摘成本高,影响了椒农的种植收益,已成为阻碍花椒产业快速发展的一个重要因素。因此,开展花椒采收装备的研究,对于降低椒农采收成本、提高花椒种植效益,促进花椒种植产业的快速发展意义重大。
发明内容
针对现有技术存在的问题,本发明提供一种技术先进、高效实用、采摘果实破损率低、收获效率高的花椒采摘装置。
本发明是通过如下技术方案实现的。
一种智能花椒采摘装置,包括花椒采摘系统、收集系统、操作手柄、控制系统、锂电池和移动底盘。所述采摘系统包括上壳体、下壳体、动刀、定刀、压刀片、直流减速电机、电机固定架、偏心轮、偏心轴。所述上壳体和下壳体通过螺钉一连接。所述的动刀包括动刀头、动刀杆、滑动槽,动刀杆的上端连接动刀头,动刀杆的下端连接滑动槽,动刀杆通过螺钉二与定刀铰接。定刀通过螺钉三固定在下壳体,所述的压刀片的一端通过螺钉四固定于上壳体上,另一端压紧在动刀头上。直流减速电机通过电机固定架固定在下壳体内部,偏心轮的中心轴孔与直流减速电机的轴连接,偏心轮的偏心轴与滑动槽滑动连接。
所述的收集系统包括软管、收集箱、直流吸风机、滤网、称重板。软管的一端连接操作手柄的下端,另一端连接收集箱进料口,直流吸风机固定于收集箱顶端,滤网固定于直流吸风机下端进风口,称重板上面放置收集箱。
所述的操作手柄的上部通过骑马卡和螺栓与采摘系统的上壳体连接,下端与软管一端通过喉箍连接,手持部设有螺纹,手持部上方安装有电源开关。
所述的控制系统包括降压模块、单片机控制板、摄像头、图像识别模块、称重传感器、直流减速电机驱动模块、电池电量检测模块、液晶触摸显示屏、语音模块。所述的降压模块输出5v直流电压。所述的称重传感器固定于称重板底部和移动底盘上部。所述的摄像头通过支架连接在操作手柄的最上端。所述的单片机控制板为STM32F407,单片机控制板的引脚分别接直流减速电机驱动模块、图像识别模块、称重传感器、电池电量检测模块、液晶触摸显示屏、语音模块的数据控制端。所述的图像识别模块采用NVIDIA Jetson Nano模块,其数据输入端与摄像头数据输出端连接,摄像头采集花椒喂入口处的图像数据并传给图像识别模块,图像识别模块对传回的图像数据进行降噪、图像增强、数据集标记、YOLO v3模型训练及识别处理,并将识别结果传递给单片机控制板,单片机控制板根据识别结果向直流减速电机驱动模块发出控制信号,控制直流减速电机的启停;单片机控制板分别控制称重传感器采集已采收花椒的重量信息,电池电量检测模块检测锂电池剩余电量,通过液晶触摸显示屏显示花椒重量及电池剩余电量;语音模块对剩余电量进行报警提示。
所述锂电池安装在移动底盘上。
所述移动底盘安装有个移动轮。
进一步地,所述动刀头有5-6个刀齿,齿顶间距4.5mm;所述动刀滑动槽的滑槽面与动刀杆为60-63度角,可使得剪切下的花椒在风机负压的作用下顺利被吸入收集箱。
进一步地,所述定刀的刀头有11-13个刀齿,较动刀头的刀齿数增加了一倍,以增加花椒喂入量,提高采摘效率;刀齿前端有导刃,通过手柄勾梳花椒束可使花椒穗柄经导刃顺利喂入刀齿间隙并被剪切,导刃的齿顶间距为2.5-2.8mm,可避免花椒果粒进入刀齿间隙,有效降低花椒采摘损伤率。
进一步地,所述压刀片采用65mn锰弹簧钢材料制成,与上壳体接触的一端为点接触。通过螺钉四的预紧力,压紧动刀头,使动刀头与定刀之间保持合适的间隙。
进一步地,所述的操作手柄为铝合金材料,内径45mm,外径为50mm。
作业时,手持操作手柄靠近花椒束,按下电源开关,直流吸风机运转产生负压吸力,利用定刀导刃勾梳花椒束,结合风机负压吸力喂入花椒穗,摄像头采集喂入口的图像并传给图像识别模块,图像识别模块对传回的图像数据进行处理识别,识别出花椒喂入后,将结果传递给单片机控制板,单片机控制器向直流减速电机驱动模块发出控制信号,启动直流减速电机运转,直流减速电机通过偏心轮转动带动动刀摆动,与定刀配合将喂入的花椒果穗剪断,直流吸风机产生的负压通过操作手柄和软管形成的风道将采摘下来的花椒吸入收集箱。采收的花椒重量及锂电池的电量显示在液晶触摸显示屏上,当锂电量剩余3%或5%时,语音模块对剩余电量进行报警提示。
本发明的优点和积极效果是:(1)通过以上技术方案完成集花椒采摘和收集功能为一体的花椒收获连续作业流程,大大提高花椒采收作业效率。(2)采摘系统结构紧凑,体积小巧,操作方便,可有效避免作业时手臂被刺划伤。(3)通过定刀、动刀的结构、齿间距等参数的合理设计可大大降低花椒机械化收获的果实损伤率,同时不伤枝、不伤芽,不影响下一年花椒结果。(4)以锂电池作为设备工作的动力来源,使得作业过程清洁卫生、绿色环保。(5)通过摄像头和图像识别模块识别检测到花椒喂入后才启动采收机构工作,可有效减少电机的空转时间,增加锂电池电源的有效作业时间和操作安全性,同时设备具有花椒自动称重、锂电池剩余电量实时监测及报警提示功能,设备的智能化程度较高。如果更换相应不同尺寸参数的定刀和动刀,还可以实现对山楂、樱桃、酸枣等小果实的高效采收。
附图说明
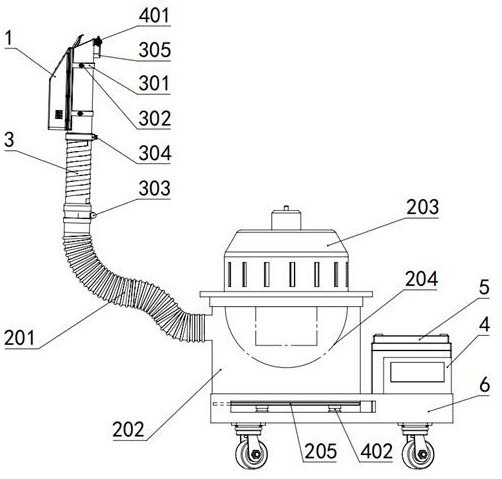
图1是本发明的整体结构示意图。
图2是本发明采摘系统的整体结构示意图。
图3是本发明采摘系统的内部结构示意图。
图4是本发明控制系统各模块连接示意框图。
图中:1、采摘系统,101、上壳体,102、下壳体,103、动刀,1030、动刀头,1031、滑动槽1032、动刀杆,104、定刀,105、压刀片,106、直流减速电机,107、电机固定架,108、偏心轮,109、偏心轴,110、螺钉一,111、螺钉二,112、螺钉三,113、螺钉四, 201、软管,202、收集箱,203、直流吸风机,204、滤网,205、称重板,3、操作手柄,301、骑马卡,302、螺栓,303、喉箍,304、电源开关,305、支架,4、控制系统,401、摄像头,402、称重传感器,5、锂电池,6、移动底盘。
具体实施方式
下面结合附图对本发明的实施例作进一步详述。
如图1、2、3所示,本发明的智能花椒采摘装置,包括花椒采摘系统1、收集系统、操作手柄3、控制系统4、锂电池5和移动底盘6。所述采摘系统1包括上壳体101、下壳体102、动刀103、定刀104、压刀片105、直流减速电机106、电机固定架107、偏心轮108、偏心轴109。所述上壳体101和下壳体102通过螺钉一110连接。所述的动刀103包括动刀头1030、动刀杆1032、滑动槽1031,动刀杆1032的上端连接动刀头1030,动刀杆1032的下端连接滑动槽1031,动刀杆1032通过螺钉二111与定刀104铰接,动刀头1030有5-6个刀齿,齿顶间距4.5mm,动刀滑动槽1031的滑槽面与动刀杆1032为60-63度角,可使得剪切下的花椒在风机负压的作用下顺利被吸入收集箱202。所述的定刀104通过螺钉三112固定在下壳体102,定刀104的刀头有11-13个刀齿,较动刀头的刀齿数增加了一倍,以增加花椒喂入量,提高采摘效率,刀齿前端有导刃1041,通过手柄勾梳花椒束可使花椒穗柄经导刃1041顺利喂入刀齿间隙并被剪切,导刃1041的齿顶间距为2.5-2.8mm,可避免花椒果粒进入刀齿间隙,有效降低花椒采摘损伤率。所述的压刀片105的一端通过螺钉四113固定于上壳体101上,另一端压紧在动刀头1030上,压刀片105采用65mn锰弹簧钢材料制成,与上壳体101接触的一端为点接触,通过螺钉四113的预紧力,压紧动刀头1030,使动刀头1030与定刀104之间保持合适的间隙。直流减速电机106通过电机固定架107固定在下壳体102内部,偏心轮108的中心轴孔与直流减速电机106的轴连接,偏心轮108的偏心轴109与滑动槽1031滑动连接。
如图1所示,所述的收集系统包括软管201、收集箱202、直流吸风机203、滤网204、称重板205。软管201的一端连接操作手柄3的下端,另一端连接收集箱202进料口,直流吸风机203固定于收集箱202顶端,滤网204固定于直流吸风机203下端进风口,称重板205上面放置收集箱202。所述的操作手柄3的上部通过骑马卡301和螺栓302与采摘系统1的上壳体101连接,下端与软管201一端通过喉箍303连接,手持部设有螺纹,手持部上方安装有电源开关304。操作手柄3为铝合金材料,内径45mm,外径为50mm。所述锂电池5安装在移动底盘6上。所述移动底盘6安装有4个移动轮。
如图1、4所示,所述的控制系统4包括降压模块、单片机控制板、摄像头401、图像识别模块、称重传感器402、直流减速电机驱动模块、电池电量检测模块、液晶触摸显示屏、语音模块。所述的降压模块输出5v直流电压。所述的摄像头401通过支架305连接在操作手柄3的最上端。所述的称重传感器402固定于称重板205底部和移动底盘6上部。所述的单片机控制板为STM32F407,单片机控制板的引脚分别接直流减速电机驱动模块、图像识别模块、称重传感器、电池电量检测模块、液晶触摸显示屏、语音模块的数据控制端。所述的图像识别模块采用NVIDIA Jetson Nano模块,其数据输入端与摄像头401数据输出端连接,摄像头401采集花椒喂入口处的图像数据并传给图像识别模块,图像识别模块对传回的图像数据进行降噪、图像增强、数据集标记、YOLO v3模型训练及识别处理,并将识别结果传递给单片机控制板,单片机控制板根据识别结果向直流减速电机驱动模块发出控制信号,控制直流减速电机的启停;单片机控制板分别控制称重传感器采集已采收花椒的重量信息,电池电量检测模块检测锂电池剩余电量,通过液晶触摸显示屏显示花椒重量及电池剩余电量;语音模块对剩余电量进行报警提示。
- 一种花椒采摘装置及其所构成的花椒视觉采摘机器人
- 智能花椒采摘装置