一种河工模型多参量测量装置及其行走控制方法
文献发布时间:2023-06-19 09:44:49
技术领域
本发明涉及河工模型试验中的自动化控制技术领域,尤其涉及一种河工模型多参量测量装置及其行走控制方法。
背景技术
在水工、河工和港工等流体模型试验,特别是大型河工模型试验中,需要对整个流域可能多达上千的测量断面进行各种试验参量的测量。河工模型试验中对测量范围内指定的批量断面进行参量测量,需要让测量平台搭载测量仪器,依次定位到各目标断面,从而开展测量。
目前主流的测量平台定位到断面的方法还是靠人工。测量人员依据测绘资料,测量和定位目标断面,在断面位置的左右岸布置简易支撑台,在其上搭起测量桥架,调整两岸支撑台位置和高度,保证桥架沿断面方向水平摆放。操作人员在当前断面通过距离测量工具,如皮尺等,测量确定起始测量点位置,并在桥架上该点位置上方安装测量仪器,进行试验参量的定点测量。完成一点的测量后,沿断面方向搬运或滑动,将测量仪器定位到下一测量点进行测量,直到完成该断面的全部测量任务。之后,再人工测量和确定下一测量断面,在左右岸重新布置支撑台,并将测量桥架搬移到下一断面,在新的断面上开始参量测量。该方式需要耗费大量人力,测量效率低;尤其涉及到多参量测量时,如地形流速同时测量,还需要在上述测量过程中不断地切换安装工作设备,非常繁琐。
发明内容
本发明的目的是提供一种河工模型多参量测量装置及其行走控制方法,为测量系统在复杂环境中的自适应测量提供技术支撑。
本发明提供一种河工模型多参量测量装置,包括:设置于河工模型河道两侧的两条并行轨道、架设于两条所述轨道之上的测量平台;
两条所述轨道的沿线上均安装有若干的属性标识,所述属性标识中包含有断面对应的属性信息,所述属性信息包括断面顺序号;
所述测量平台的桥身的前后两侧分别安装有第一滑动装置、第二滑动装置,所述第一滑动装置、所述第二滑动装置上搭载有测量设备,所述第一滑动装置、所述第二滑动装置用于在断面方向滑动;
所述测量平台的桥身的左右两端分别安装有一个行走机构,两个所述行走机构用于分别在两条所述轨道上沿河道方向前后移动、分别读取两条所述轨道上的所述属性标识;
所述测量平台上安装有控制单元,所述控制单元用于控制所述第一滑动装置、所述第二滑动装置、两个所述行走机构的移动。
优选的,所述河工模型的待测区域范围内的每个现有基本断面的两端端点分别在两条所述轨道的对应位置处安装有所述属性标识;所述现有基本断面包括待测断面、行走辅助断面;
所述控制单元中存储有断面汇总信息,所述断面汇总信息包括河工模型的待测区域范围内所有现有基本断面对应的属性信息;
所述断面顺序号为所述河工模型的待测区域范围内所有现有基本断面进行统一编号后得到的顺序号。
优选的,所述属性信息还包括:扩展号;
所述属性信息中采用两个字段分别存储所述断面顺序号、所述扩展号;
所述现有基本断面的扩展号设为0;在第一现有基本断面和第二现有基本断面之间增加临时工程断面时,所述临时工程断面的断面顺序号设置为与所述第一现有基本断面的断面顺序号相同,所述临时工程断面的扩展号按其在所述第一现有基本断面和所述第二现有断面之间的临时工程断面中的顺序依次设置为1~15中的一个数值;其中,所述第二现有基本断面的断面顺序号为所述第一现有基本断面的断面顺序号加一;
所述断面汇总信息包括河工模型的待测区域范围内所有现有基本断面、所有临时工程断面对应的属性信息。
优选的,所述属性信息还包括:断面间距属性值;
在沿河道方向上,所述第一滑动装置、所述第二滑动装置上搭载的两测量设备之间的间距记为第一距离;在沿河道方向上,当前断面与下一断面在河道同一侧对应的两个端点之间的间距记为第二距离;其中,下一断面的断面顺序号为当前断面的断面顺序号加一,当前断面、下一断面均可为现有基本断面或临时工程断面;
若所述第二距离大于所述第一距离,则当前断面对应的断面间距属性值设置为第一间距值;若所述第二距离小于等于所述第一距离,则当前断面对应的断面间距属性值设置为第二间距值。
优选的,所述属性信息还包括:河道属性值;
所述第一滑动装置、所述第二滑动装置上搭载的测量设备为单一传感器或传感器阵列;若搭载的测量设备为传感器阵列,则每个所述传感器阵列沿断面方向从左侧到右侧对传感器依次进行编号;
若当前断面对应的河道宽度大于所述测量设备及对应滑动装置的宽度,则当前断面对应的河道属性值设置为第一河道值;
若当前断面对应的河道宽度小于等于所述测量设备及对应滑动装置的宽度,且当前断面对应的河道到左侧轨道的距离小于等于河道到右侧轨道的距离,则当前断面对应的河道属性值设置为第一河道值;
若当前断面对应的河道宽度小于等于所述测量设备及对应滑动装置的宽度,且当前断面对应的河道到左侧轨道的距离大于河道到右侧轨道的距离,则当前断面对应的河道属性值设置为第二河道值。
另一方面,利用上述的河工模型多参量测量装置,本发明提供一种河工模型多参量测量装置的行走控制方法,包括:
步骤1、在河工模型的待测区域范围内,针对每个断面,在其与轨道对应的位置安装属性标识;
步骤2、所述控制单元获得指定断面的属性信息后,以当前断面为起始位置,结合所述控制单元中存储的断面汇总信息,控制两个所述行走机构向指定断面的方向行走;在所述行走机构的行走过程中,通过两个所述行走机构分别读取两个所述轨道上的所述属性标识,并分别发送对应的识别信息至所述控制单元;所述控制单元根据所述识别信息判断出在沿河道方向上当前断面与指定断面之间存在n个中间断面;所述控制单元控制两个所述行走机构在均定位第i个中间断面后,再同步开始行走,以继续定位第i+1个中间断面,如此逐断面行走直至定位到所述指定断面;其中,i取值为[1,n-1];
进行每次断面定位时,所述控制单元根据所述识别信息,对两个所述行走机构是否达到某断面的位置进行判断;若所述控制单元判断某一侧的行走机构已到达该断面的位置,则该侧的行走机构停止移动;若所述控制单元判断某一侧的行走机构未到达该断面的位置,则控制该侧的行走机构向该断面所在方向进行移动;若所述控制单元判断两侧的所述行走机构均已到达该断面的位置,则认为完成了该次断面的定位。
优选的,所述河工模型多参量测量装置的行走控制方法还包括:
步骤3、所述控制单元控制两个所述行走机构定位到某一断面的前侧测量标志处后,使得位于测量平台的桥身前侧的第一滑动装置上搭载的测量设备对准该断面进行前侧测量;完成前侧测量后,所述控制单元控制两个所述行走机构同步移动,到达该断面的后侧测量标志处,使得位于测量平台的桥身后侧的第二滑动装置上搭载的测量设备对准该断面进行后侧断面测量,并认为完成了当前断面的测量;
完成当前断面的测量后,通过两个所述行走机构分别读取当前断面对应的属性标识,并发送至所述控制单元;所述属性标识包括断面间距属性值;所述控制单元根据所述断面间距属性值控制两个所述行走机构同步移动,以定位下一断面的前侧测量标志处;
其中,若当前断面对应的断面间距属性值为第一间距值,则直接以当前断面的后侧测量标志处为起点,控制两个所述行走机构向下一断面的方向行走;若当前断面对应的断面间距属性值为第二间距值,则控制两个所述行走机构回退到当前断面的前侧测量标志处,以此为起点,向下一断面的方向行走。
优选的,所述河工模型多参量测量装置的行走控制方法还包括:
步骤4、通过两个所述行走机构分别读取当前断面对应的属性标识,并发送至所述控制单元;所述属性标识包括河道属性值;
若当前断面对应的河道属性值为第一河道值,则将单一传感器或传感器阵列中位于最左侧的传感器定位为第一测量点,进行断面测量;
若当前断面对应的河道属性值为第二河道值,则将传感器阵列中位于最右侧的传感器定位到最后一个测量点,进行断面测量。
优选的,若当前断面对应的河道属性值为第一河道值,且所述控制单元判断出当前断面对应的河道宽度大于所述传感器阵列及对应滑动装置的宽度,则通过传感器阵列多路同步测量,再整体平移,分批自动完成断面测量;
若当前断面对应的河道属性值为第一河道值,且所述控制单元判断出当前断面对应的河道宽度小于等于所述传感器阵列及对应滑动装置的宽度,则自动选取左侧足够覆盖河道范围的部分传感器定位测量点开展断面测量。
优选的,若当前断面对应的河道属性值为第二河道值,则自动选取右侧足够覆盖河道范围的部分传感器定位测量点开展断面测量。
本发明中提供的一个或多个技术方案,至少具有如下技术效果或优点:
在发明中,提供的河工模型多参量测量装置包括设置于河工模型河道两侧的两条并行轨道、架设于两条轨道之上的测量平台;两条轨道的沿线上均安装有若干的属性标识,属性标识中包含有断面对应的属性信息,属性信息包括断面顺序号;测量平台的桥身的前后两侧上分别安装有第一滑动装置、第二滑动装置,第一滑动装置、第二滑动装置上搭载有测量设备,第一滑动装置、第二滑动装置用于在断面方向滑动;测量平台的桥身的左右两端分别安装有一个行走机构,两个行走机构用于分别在两条轨道上沿河道方向前后移动、分别读取两条轨道上的所述属性标识;测量平台上安装有控制单元,控制单元用于控制第一滑动装置、第二滑动装置、两个行走机构的移动。本发明针对河工模型需要测量的断面数量较大、断面的两侧端点在沿河道分布上非常复杂、轨道的走向具有不规则性等因素,为方便对各个断面进行管理,为各断面及其两端端点设置属性标识,包括断面顺序号等信息,供测量平台在行走过程中读取分析,且采用逐断面行走方式,结合平台控制单元存储的断面汇总信息和沿途读取的属性标识对断面进行定位、智能控制两个行走机构的行走方式,保证在行走过程中自动适应各种复杂情况,杜绝因为轨道弯曲造成大角度转向时测量平台倾斜过大,导致测量平台长度受限以致发生的卡死情况,为测量系统在复杂环境中的自适应测量提供了技术支撑。
附图说明
图1为本发明实施例6提供的一种河工模型多参量测量装置的行走控制方法中针对窄间距断面进行行走控制的流程示意图;
图2为本发明实施例7提供的一种河工模型多参量测量装置的行走控制方法中针对河道窄且紧靠左岸的情况进行行走控制的示意图;
图3为本发明实施例7提供的一种河工模型多参量测量装置的行走控制方法中针对河道窄且紧靠右岸的情况进行行走控制的示意图。
图4为本发明实施例8提供的一种河工模型多参量测量装置的行走控制方法的流程图。
其中,1—轨道、2—测量平台、3—第一滑动装置、4—第二滑动装置、5—第一行走机构、6—第二行走机构、7—控制单元、8—当前断面、9—下一断面。
具体实施方式
为了更好的理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案进行详细的说明。
实施例1:
实施例1提供了一种河工模型多参量测量装置,参见图1,包括:设置于河工模型河道两侧的两条并行轨道1、架设于两条所述轨道之上的测量平台2;两条所述轨道1的沿线上均安装有若干的属性标识,所述属性标识中包含有断面对应的属性信息,所述属性信息包括断面顺序号;所述测量平台2的桥身的前后两侧上分别安装有第一滑动装置3、第二滑动装置4,所述第一滑动装置3、所述第二滑动装置4上搭载有测量设备(两个滑动装置可搭载不同的测量设备,例如地形仪和多路流速测量仪),所述第一滑动装置3、所述第二滑动装置4用于在断面方向(X方向)滑动,到达断面上的特定测量位置进行测量;所述测量平台2的桥身的左右两端分别安装有一个行走机构(记为第一行走机构5、第二行走机构6),两个所述行走机构用于分别在两条所述轨道1上沿河道方向(Y方向)前后移动、分别读取两条所述轨道1上的所述属性标识;所述测量平台2上安装有控制单元7,所述控制单元7用于控制所述第一滑动装置3、所述第二滑动装置4、两个所述行走机构的移动,所述控制单元7与计算机通过有线或无线方式进行控制指令和数据通信。
所述河工模型的待测区域范围内的每个现有基本断面的两端端点分别在两条所述轨道1的对应位置处安装有所述属性标识;所述现有基本断面包括待测断面、行走辅助断面;所述控制单元7中存储有断面汇总信息,所述断面汇总信息包括河工模型的待测区域范围内所有现有基本断面对应的属性信息;所述断面顺序号为所述河工模型的待测区域范围内所有现有基本断面进行统一编号后得到的顺序号。
实施例1针对整个河工模型依据规模,其中需要测量的断面数量少则几十,多则数百上千,断面的两侧端点在沿河道分布上非常复杂,存在大曲率弯曲造成相邻断面间距两侧分布差别大因素的情况,对各个断面进行管理,为各断面及其两端端点设置属性标识,并安装在两侧轨道上对应各工程测量断面位置处,供测量平台在行走过程中读取分析,能够解决河工模型多参量测量平台在长距离行走过程中卡死的问题。
实施例2:
实施例2在实施例1的基础上进一步优化,所述属性信息还包括:扩展号。所述属性信息中采用两个字段分别存储所述断面顺序号、所述扩展号。
所述现有基本断面的扩展号设为0;在第一现有基本断面和第二现有基本断面之间增加临时工程断面时,所述临时工程断面的断面顺序号设置为与所述第一现有基本断面的断面顺序号相同,所述临时工程断面的扩展号按其在所述第一现有基本断面和所述第二现有断面之间的临时工程断面中的顺序依次设置为1~15中的一个数值;其中,所述第二现有基本断面的断面顺序号为所述第一现有基本断面的断面顺序号加一;所述断面汇总信息包括河工模型的待测区域范围内所有现有基本断面、所有临时工程断面对应的属性信息。
实施例2提供了扩展方案,若未来根据试验要求,用户需要在某现有基本断面后增加临时工程断面,系统允许用户自行扩展设置断面,因此再用4个数据位作为扩展号。每两个现有基本断面之间可增加多个临时工程断面,可以满足目前模型试验的要求。
实施例3:
实施例3在实施例1或实施例2的基础上进一步优化,所述属性信息还包括:断面间距属性值。
在沿河道方向上,所述第一滑动装置、所述第二滑动装置上搭载的两测量设备之间的间距记为第一距离;在沿河道方向上,当前断面与下一断面在河道同一侧对应的两个端点之间的间距记为第二距离;其中,下一断面的断面顺序号为当前断面的断面顺序号加一,当前断面、下一断面均可为现有基本断面或临时工程断面;若所述第二距离大于所述第一距离,则当前断面对应的断面间距属性值设置为第一间距值;若所述第二距离小于等于所述第一距离,则当前断面对应的断面间距属性值设置为第二间距值。
实施例3提供了针对断面间距的优化方案,能够避免前侧测量结束后两个行走机构同步移动到达断面后侧测量标志的过程中,第一滑动装置搭载的测量设备越过了下一断面前侧测量标志,造成后侧设备测量完成后以后侧测量标志为起点,两个行走机构向下一断面方向行走时无法定位下一断面前侧测量标志的情况。
实施例4:
实施例4在实施例1或实施例2或实施例3的基础上进一步优化,所述属性信息还包括:河道属性值。
所述第一滑动装置、所述第二滑动装置上搭载的测量设备为单一传感器或传感器阵列;若搭载的测量设备为传感器阵列,则每个所述传感器阵列沿断面方向从左侧到右侧对传感器依次进行编号。若当前断面对应的河道宽度大于所述测量设备及对应滑动装置的宽度,则当前断面对应的河道属性值设置为第一河道值;若当前断面对应的河道宽度小于等于所述测量设备及对应滑动装置的宽度,且当前断面对应的河道到左侧轨道的距离小于等于河道到右侧轨道的距离,则当前断面对应的河道属性值设置为第一河道值;若当前断面对应的河道宽度小于等于所述测量设备及对应滑动装置的宽度,且当前断面对应的河道到左侧轨道的距离大于河道到右侧轨道的距离,则当前断面对应的河道属性值设置为第二河道值。
所述第一滑动装置、所述第二滑动装置会分别对准断面独立测量。若所述第一滑动装置、所述第二滑动装置上搭载的测量设备都是单一传感器,例如一侧地形仪,一侧流场分析仪,则由于仪器宽度不大,基本不存在撞岸危险,且河道属性值通常为第一河道值,不用利用河道属性进行处理。若任一滑动装置搭载的测量设备为传感器阵列,则可以利用河道属性进行处理。例如,实际使用时,将地形仪作为第一滑动装置搭载的设备,正常测量即可;将多路流速测量仪作为第二滑动装置搭载的设备,利用河道属性特别处理进行测量,避免撞岸。其他应用情况中,也可以使两个滑动装置搭载的测量设备均为传感器阵列。
实施例4能够避免测量传感器发生撞岸的情况发生,使得在河道较窄的情况下断面方向排列较宽的仪器不撞岸。
实施例5:
实施例5提供一种河工模型多参量测量装置的行走控制方法,对应可采用实施例1-4中记载的河工模型多参量测量装置。
实施例5提供的行走控制方法包括:
步骤1、在河工模型的待测区域范围内,针对每个断面,在其与轨道对应的位置安装属性标识。
步骤2、所述控制单元获得指定断面的属性信息后,以当前断面为起始位置,结合所述控制单元中存储的断面汇总信息,控制两个所述行走机构向指定断面的方向行走;在所述行走机构的行走过程中,通过两个所述行走机构分别读取两个所述轨道上的所述属性标识,并分别发送对应的识别信息至所述控制单元;所述控制单元根据所述识别信息判断出在沿河道方向上当前断面与指定断面之间存在n个中间断面;所述控制单元控制两个所述行走机构在均定位第i个中间断面后,再同步开始行走,以继续定位第i+1个中间断面,如此逐断面行走直至定位到所述指定断面;其中,i取值为[1,n-1];进行每次断面定位时,所述控制单元根据所述识别信息,对两个所述行走机构是否达到某断面的位置进行判断;若所述控制单元判断某一侧的行走机构已到达该断面的位置,则该侧的行走机构停止移动;若所述控制单元判断某一侧的行走机构未到达该断面的位置,则控制该侧的行走机构向该断面所在方向进行移动;若所述控制单元判断两侧的所述行走机构均已到达该断面的位置,则认为完成了该次断面的定位。
由于模型两侧轨道的走向具有不规则性,因此实施例5采用逐断面行走方式,在多断面行走过程中,测量平台的控制单元控制左右岸两侧行走机构共同完成当前断面的行走定位后,再继续进行下一断面的行走定位。在用户向测量平台下达指定断面的行走定位后,两个行走机构在行走过程中,读取沿途两岸的属性标识;以当前断面为起始位置,测量平台控制单元控制左右岸行走机构共同向指定断面行走。当距离短的一侧,如左岸行走机构,先走到下一断面位置后,该侧即停止行走,等待另一侧,如右岸行走机构,继续行走到对应断面位置,然后两侧再同步行走,以定位到下一断面。这种结合平台控制单元存储的断面汇总信息和沿途读取的属性标识对断面进行定位、智能控制左右行走机构的自动行走方式,能够保证平台在行走过程中自动适应各种复杂情况,杜绝因为轨道弯曲造成大角度转向时测量平台倾斜过大,导致测量平台长度受限以致发生的卡死的情况发生。
实施例6:
实施例6提供一种河工模型多参量测量装置的行走控制方法,对应可采用实施例3记载的河工模型多参量测量装置,除了包括实施例5中的步骤1和步骤2外,还包括:步骤3、所述控制单元控制两个所述行走机构定位到某一断面的前侧测量标志处后,使得位于测量平台的桥身前侧的第一滑动装置上搭载的测量设备对准该断面进行前侧测量;完成前侧测量后,所述控制单元控制两个所述行走机构同步移动,到达该断面的后侧测量标志处,使得位于测量平台的桥身后侧的第二滑动装置上搭载的测量设备对准该断面进行后侧断面测量,并认为完成了当前断面的测量;完成当前断面的测量后,通过两个所述行走机构分别读取当前断面对应的属性标识,并发送至所述控制单元;所述属性标识包括断面间距属性值;所述控制单元根据所述断面间距属性值控制两个所述行走机构同步移动,以定位下一断面的前侧测量标志处;其中,若当前断面对应的断面间距属性值为第一间距值,则直接以当前断面的后侧测量标志处为起点,控制两个所述行走机构向下一断面的方向行走;若当前断面对应的断面间距属性值为第二间距值,则控制两个所述行走机构回退到当前断面的前侧测量标志处,以此为起点,向下一断面的方向行走。
为实施多参量的协同测量,测量平台两侧可以搭载不同传感器,在控制单元的综合控制下开展多参量协同测量。实施例6设置断面间距属性表示相对测量平台前后两侧搭载的仪器之间的间距,相邻断面的间距宽窄情况,指示自动测量平台行进策略和平台两侧仪器合作测量时之间的协调情况。参见图1,当多断面批量测量时,如断面间距较大,超过测量平台两侧传感器的间距,即当前断面对应的断面间距属性值设置为第一间距值(例如0),则定位流程如下:控制单元7控制左右岸行走机构(即第一行走机构5、第二行走机构6)定位到当前断面8,此时,桥身前侧的滑动装置(即第一滑动装置3)搭载的测量设备,如地形仪,对准了当前断面8,进行断面参量测量,参见图1(a)。当前断面8所有测量点的该测量参量都测量完毕后,控制单元7控制左右行走机构同步向前移动,到达桥身后侧滑动装置(即第二滑动装置4)搭载的测量设备,如流速仪,的测量标志处,此时后侧测量设备对准了当前断面8,进行后侧测量参量的断面测量,参见图1(b)。当前断面8所有测量点的该测量参量都测量完毕后,控制单元7控制左右行走机构同步向前移动,继续定位下一断面9。当断面间距较小,小于两侧传感器间距,即当前断面对应的断面间距属性值设置为第二间距值(例如1),如上述步骤,桥身前侧滑动装置搭载的测量设备完成参量测量任务后,继续移动到桥身后侧滑动装置搭载的设备的测量标志处开始后侧参量测量,此时测量平台实际上已越过了下一断面9,参见图1(b)。待后侧设备测量完毕后,测量平台向前寻找定位下一测量断面时就会漏掉越过的下一断面9,致使定位失败。因此,如读出断面间距属性值设置为第二间距值,即窄断面间距,则定位流程如下:首先让桥身前侧滑动装置搭载的测量设备定位到当前断面8,进行测量,参见图1(a);再向前行进使桥身后侧滑动装置搭载的测量设备定位到当前断面8,进行参量测量,参见图1(b);然后让测量平台2回退,使桥身前侧滑动装置搭载的设备定位到当前断面8的测量位置,参见图1(c),以此为起点,两端行走机构在控制单元7的控制下向前行进,寻找定位下一断面9,参见图1(d)。
实施例7:
实施例7提供一种河工模型多参量测量装置的行走控制方法,对应可采用实施例4记载的河工模型多参量测量装置,除了包括实施例5中的步骤1和步骤2外,还包括:步骤4、通过两个所述行走机构分别读取当前断面对应的属性标识,并发送至所述控制单元;所述属性标识包括河道属性值;若当前断面对应的河道属性值为第一河道值,则将单一传感器或传感器阵列中位于最左侧的传感器定位为第一测量点,进行断面测量;若当前断面对应的河道属性值为第二河道值,则将传感器阵列中位于最右侧的传感器定位到最后一个测量点,进行断面测量。
若当前断面对应的河道属性值为第一河道值,且所述控制单元判断出当前断面对应的河道宽度大于所述传感器阵列及对应滑动装置的宽度,则通过传感器阵列多路同步测量,再整体平移,分批自动完成断面测量。若当前断面对应的河道属性值为第一河道值,且所述控制单元判断出当前断面对应的河道宽度小于等于所述传感器阵列及对应滑动装置的宽度,则自动选取左侧足够覆盖河道范围的部分传感器定位测量点开展断面测量。若当前断面对应的河道属性值为第二河道值,则自动选取右侧足够覆盖河道范围的部分传感器定位测量点开展断面测量。
为提高断面多点测量效率,测量平台每侧可支持多传感器同时测量。河道属性表示该断面处河道宽窄情况,体现测量平台上搭载测量仪器对河道宽窄的适应情况。当测量断面处河道宽度较窄,则可根据实测的河道宽度,自动选择传感器阵列中的部分传感器进行测量。此时,若总采用沿断面方向左侧1#传感器定位第一测量点位置的话,在河道较窄且偏右岸的情况下,会造成末端的部分传感器撞击测量平台右端机构及右侧轨道。因此,实施例7针对此情况制定了专门的行走策略。首先,设计河道属性描述上述情形:当前断面对应的河道属性值为第一河道值属性值(例如0)时,表示河道较宽(宽度大于流速测量平台宽度),或河道较窄但其靠近左岸轨道,这种情形下,测量系统自动将左侧1#传感器定位第一测量点进行测量,参见图2;当前断面对应的河道属性值为第二河道值属性值(例如1)时,表示河道较窄(宽度小于流速测量平台宽度)且其靠近右岸轨道。这种情形下,测量系统自动将右侧末端传感器定位到最后一个测量点,如图3所示开展测量,避免测量传感器发生撞岸。
实施例8:
实施例8提供一种河工模型多参量测量装置的行走控制方法,包括实施例5中的步骤1和步骤2、实施例6中的步骤3、实施例7中的步骤4,即实施例8提供的河工模型多参量测量装置的行走控制方法能够解决河工模型多参量测量平台在长距离行走过程中出现的卡死、在断面间距过小的情况下平台两侧测量仪器交替测量过程中出现的漏掉待测断面、在河道较窄的情况下断面方向排列较宽的仪器导致出现的撞岸等问题。
需要说明的是,上述实施例中出现的步骤2、步骤3、步骤4之间没有严格的顺序要求,例如,根据应用需要,步骤4可以出现在步骤3之前。
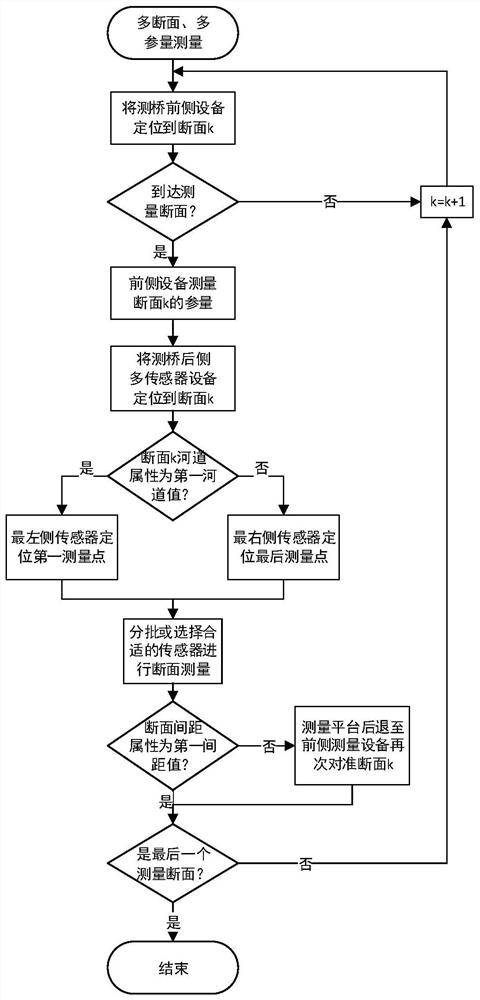
实施例8对应的流程图参见图4,可以自动进行多断面、多参量测量。当用户下发测量任务后,测量平台在控制单元的控制下,将平台前侧设备定位到最近的断面,并从标记卡中读取断面属性。如果到达测量任务中的指定断面,则开始测量过程,否则,逐断面定位,直到定位到指定断面。到达指定断面后,前侧设备(如地形仪)即对准测量断面。控制单元控制前侧设备测量该测量断面的参量,然后移动测量平台,使后侧设备(如多路流速测量仪)对准测量断面。判断该断面河道属性是否为第一河道值:是,则该断面为宽河道或河道靠近左侧轨道。此时使最左侧定位至第一测量点即可;否,则该断面为窄河道且河道靠近右侧轨道。此时采取倒定位方式,将最右侧传感器定位至最后测量点。之后根据河道宽窄和多路传感器宽窄之间的相对比较关系,分批或选择部分传感器进行断面测量。后侧设备的断面测量完毕后,查询断面的间距属性是否为第一间距值:否,则为窄断面间距,需要测量平台后退至前侧设备对准当前断面,防止跳过下一断面;是,则为宽间距,无须上述操作。判断测量任务是否完成(当前断面是否最后一个测量断面),如果不是,则开始找下一断面,重复上述操作;如当前断面是最后一个测量断面,则任务完成。
综上,本发明提供的河工模型多参量测量装置及其行走控制方法,通过河工模型范围内的所有测量断面的属性信息的设计、针对不同属性和类别的断面进行针对性的策略应对,解决了河工模型多参量测量平台在长距离行走过程中出现卡死、在河道较窄的情况下断面方向排列较宽的仪器出现撞岸、在断面间距过小的情况下平台两侧测量仪器交替测量过程中出现漏掉待测断面等复杂问题,为测量系统在复杂环境中自适应定位测量位置和开展多参量同步测量提供技术支撑。
本发明能够控制测量平台在河工模型河道两岸轨道上行走,使之适应轨道弯曲、断面之间间距小或两岸河道间过窄等情况,从而能够在大范围测量区域中顺利行走到任意断面的任意测量点,并且在多参量、多传感器协同测量时可靠工作。本发明能够适应河工模型,尤其是大型河工模型的复杂环境和断面分布情况,具有实用性高、操作方便、成本低廉、运行可靠的优点。
最后所应说明的是,以上具体实施方式仅用以说明本发明的技术方案而非限制,尽管参照实例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
- 一种河工模型多参量测量装置及其行走控制方法
- 一种河工模型多参量测量装置及其行走控制方法