一种提高大范围调速响应能力的超高速电动空压机变电压扩稳控制系统及方法
文献发布时间:2023-06-19 09:47:53
技术领域
本发明属于超高速电动空压机扩稳控制领域,尤其涉及一种提高大范围调速响应能力的超高速电动空压机变电压扩稳控制系统及方法。
背景技术
超高速电动空压机是燃料电池系统必不可少的核心部件,为燃料电池系统提供充足的空气,保证燃料电池系统的功率输出。然而,超高速电动空压机大范围快速调速时转速突变,引发离心式涡轮增压装置内部流量陡增、出口气体流动不稳定性加强,提高离心式涡轮增压装置内部气体流速,使得负载激励的幅值和频率快速上升。超高速电动空压机负载激励的幅值和频率激增,与电磁激励共同作用下逐渐侵蚀其稳定域,并诱发超高速电动空压机最终失去稳定性,使得超高速电动空压机转速激振和振动噪声异常严重。
中国专利(CN110069033A)提供了一种燃料电池空压机流量控制方法,通过预测得到的车速,计算对应车速下燃料电池所需提供的功率和空压机所需输出的空气流量,并基于该输出目标进行空压机的转速控制,适应工况的变化。该专利存在的问题在于:简单地依靠功率需求进行转速控制,在转速控制时没有考量超高速空压机在负载激励影响下产生的转速激振,振动噪声大,响应时间长。
中国专利(CN110729503A)提供了用于切换氢燃料电池空压机模式的方法,依据空压机转速和需求功率,根据当前执行的切换方式,实现空压机的闭环或开环控制的切换,能够提高空气流量控制精度和控制响应性,在低转速、小负荷区域也能够保证空气控制系统的稳定。这种方法重视了超高速空压机转速控制的响应问题,但仍存在下述问题:超高速电动空压机在超高速区间内进行大范围快速调速时,模式切换已经无法调控负载激励引起的转速激振,只能确保在低转速、小负荷区域的稳定运行。
当前,随着燃料电池系统技术的发展,超高速电动空压机的稳定性问题已经突出地摆在了研究人员的面前,从负载激励入手,提出一种有效解决超高速电动空压机稳定性问题的扩稳控制方法具有极高的现实意义。
发明内容
针对现有技术中存在不足,本发明提供了一种提高大范围调速响应能力的超高速电动空压机变电压扩稳控制系统及方法,引入动力学理论对超高速电动空压机稳定性进行分析,实现超高速电动空压机的扩稳控制,能够显著压缩超高速电动空压机的响应时间,降低振动噪声,提升稳定性。
本发明是通过以下技术手段实现上述技术目的的。
一种提高大范围调速响应能力的超高速电动空压机变电压扩稳控制系统,包括变电压扩稳控制模块,所述变电压扩稳控制模块包括d、q轴电压稳定范围求解子系统、轨道定位控制子系统和轨道迁移控制子系统,所述d、q轴电压稳定范围求解子系统根据输入的实时转速和d、q轴电流,输出d、q轴电压稳定范围给轨道定位控制子系统,所述轨道定位控制子系统计算出目标收敛域,传递给轨道迁移控制子系统,所述轨道迁移控制子系统根据目标收敛域及d、q轴解耦电压获取d、q轴电压指令,作为变电压扩稳控制模块的输出。
一种提高大范围调速响应能力的超高速电动空压机变电压扩稳控制方法,包括步骤:
步骤(1),d、q轴电压稳定范围求解子系统接收实时转速信号、实时d轴电流信号和实时q轴电流信号,轨道迁移控制子系统接收d、q轴解耦电压信号;d、q轴电压稳定范围求解子系统利用负载激励矩阵值函数辨识当前的负载激励
步骤(2),d、q轴电压稳定范围求解子系统利用预设的电机电磁、机械参数以及辨识的当前负载激励,获得当前负载条件下d、q轴电压稳定范围
步骤(3),依据当前负载条件下d、q轴电压稳定范围,轨道定位控制子系统、轨道迁移控制子系统对输入的d、q轴解耦电压信号进行修正,输出d、q轴电压指令值。
进一步地,所述负载激励矩阵值函数为F(ω)=H(ω)
进一步地,所述负载激励矩阵值函数的获取过程为:利用无网格法进行有限元仿真技术重构生成负载激励时域响应矩阵,采用罚函数施加有限元网格的边界条件,时间步迭代得到超高速电动空压机负载激励时域响应矩阵;将所述负载激励时域响应矩阵重构为Hankel矩阵,采用正交三角分解及特征值分解,得到超高速电动空压机的负载激励频响函数矩阵,利用直接求逆法实现负载激励矩阵值函数的辨识,得到所述负载激励矩阵值函数。
进一步地,所述当前负载条件下d、q轴电压稳定范围,通过辨识的负载激励、d轴电压与q轴电压的三参数耦合分岔集确定。
进一步地,所述三参数耦合分岔集由求解Fold分岔和Hopf分岔临界条件获取。
进一步地,所述d、q轴电压稳定范围的获取,需要计算系统的平衡点,具体为:建立超高速电动空压机高维度、多尺度非线性动力学模型,使用混沌寻优法搜索平衡点全局最优解,以每次混沌寻优法得到的平衡点全局最优解为搜索初值,以上一次共轭梯度法求得的平衡点局部精确解和本次混沌寻优法求得的平衡点全局最优解的距离为半径,利用共轭梯度法搜索平衡点精确解。
进一步地,所述d、q轴电压稳定数值范围作为收敛域C,d、q轴电压平方之和最大值作为期望控制目标g,期望控制目标g∈C,系统状态变量将自动趋向于g,完成分岔参数直接干预的超高速电动空压机扩稳控制。
本发明的有益效果为:本发明从抵抗较强负载激励的目标着手,将变电压扩稳控制模块嵌入在电压解耦控制模块之后,变电压扩稳控制模块对负载激励进行准确估计,计算保证系统安全稳定运行的d、q轴电压数值范围,施加控制得到d、q轴电压指令作为变电压扩稳控制模块的输出,使得超高速电动空压机能够抵抗较强负载激励。本发明从根本上解决了超高速电动空压机产生转速激振的问题,降低了振动噪声;转速激振的减少使得转速平滑过渡,免于进行额外的超调处理,响应时间被进一步压缩。本发明能够自适应负载的变化,尤其适应全功率燃料电池系统带来的极端工况。
附图说明
图1为本发明所述高速电动空压机变电压扩稳控制系统架构图;
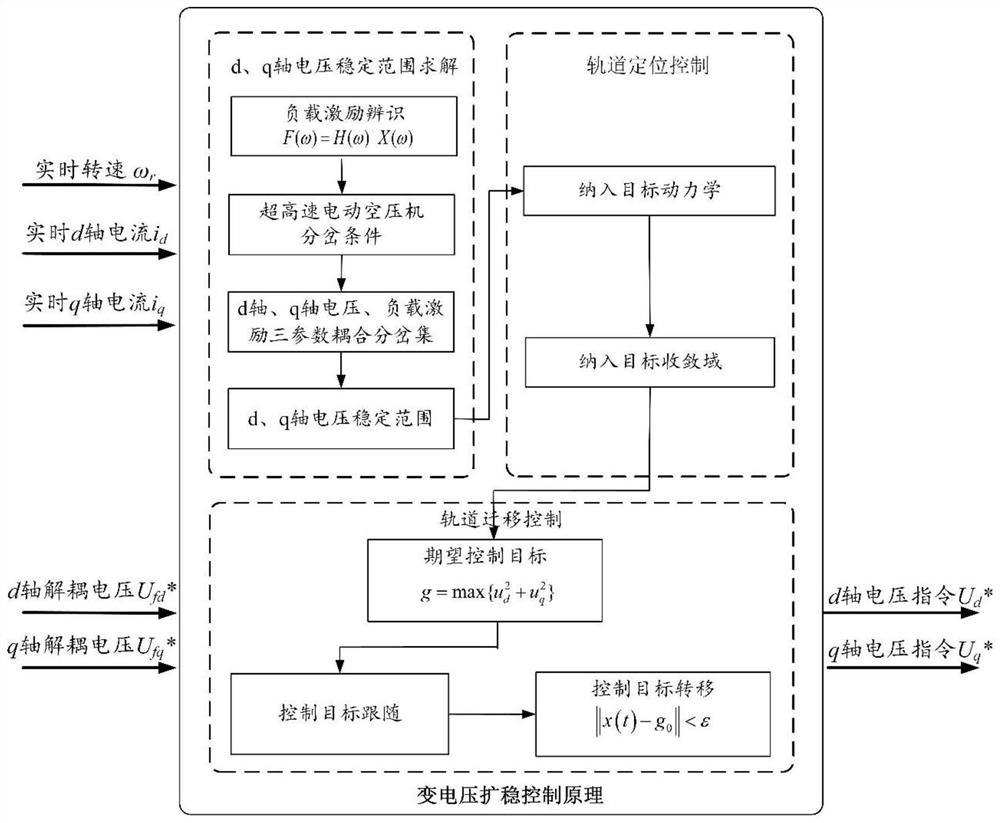
图2为本发明所述高速电动空压机变电压扩稳控制原理图。
具体实施方式
下面结合附图以及具体实施例对本发明作进一步的说明,但本发明的保护范围并不限于此。
如图1所示,一种提高大范围调速响应能力的超高速电动空压机变电压扩稳控制系统,将变电压扩稳控制模块嵌入在电压解耦控制模块之后,对负载激励进行准确估计,计算保证系统安全稳定运行的d、q轴电压数值范围,施加控制得到d、q轴电压指令
所述变电压扩稳控制模块接收电压解耦模块发送的d、q轴解耦电压信号
所述变电压扩稳控制模块包括d、q轴电压稳定范围求解子系统、轨道定位控制子系统、轨道迁移控制子系统。所述d、q轴电压稳定范围求解子系统根据输入的实时转速ω
一种提高大范围调速响应能力的超高速电动空压机变电压扩稳控制方法,具体包括如下步骤:
步骤(1),d、q轴电压稳定范围求解子系统接收实时转速信号ω
式中:φ
为了精确地捕捉引起负载激励的压力脉动,需构造无振荡的高阶格式,使用线性网格分布函数代替常值网格分布函数,重构后得到空间离散后无网格节点上流场量为:
式中:
根据台架试验获取超高速电动空压机的转速、转矩、进口压力、出口压力、空气流量、进口温度、出口温度等试验数据,采用罚函数施加有限元网格的边界条件:
式中:α为边界罚因子,
在完成空间离散、流场量重构及边界条件获取后,进行时间步迭代,得到超高速电动空压机负载激励时域响应矩阵为:
式中:f(ω
将超高速电动空压机负载激励时域响应矩阵重构为Hankel矩阵:
式中:y
采用正交三角分解对Hankel矩阵进行缩减处理,得到Y
式中:Y
将时域状态矩阵B进行特征值分解,求得超高速电动空压机负载激励频响函数矩阵:
H(ω)=κ
式中:κ为特征矢量矩阵;
采用直接求逆法实现负载激励矩阵值函数辨识,超高速电动空压机复杂时变负载激励矩阵值函数表示为:
F(ω)=H(ω)
式中:H(ω)
步骤(2),d、q轴电压稳定范围求解子系统利用预设的电机电磁、机械参数以及辨识的当前负载激励,获得当前负载条件下d、q轴电压稳定范围
d、q轴电压稳定范围获取时需要计算系统的平衡点,首先建立超高速电动空压机高维度、多尺度非线性动力学模型:
式中:w=f
使用混沌寻优法搜索平衡点全局最优解,混沌寻优法的目标函数定义为:
minf(i′
式中:i′
以每次混沌寻优法得到的平衡点全局最优解为搜索初值,以上一次共轭梯度法求得的平衡点局部精确解与本次混沌寻优法求得的平衡点全局最优解的距离为半径,利用共轭梯度法搜索平衡点精确解,共轭梯度法搜索半径可由下式计算得到:
其中,Δ为上一次共轭梯度法求得的平衡点局部精确解和本次混沌寻优法求得的平衡点全局最优解之间的差值;
式(9)所示的超高速电动空压机高维度、多尺度非线性动力学模型的雅可比矩阵对应特征方程可以表示为:
det=λ
式中:λ为所述线性动力学模型的雅可比矩阵对应的特征根,a
系统平衡点产生Fold分岔的临界条件为:
若式(12)存在一对纯虚特征根和负实特征根,会导致系统平衡点全部失去稳定性产生Hopf分岔,设负实特征根λ
式中:
Fold分岔和Hopf分岔临界条件给出辨识的负载激励、d轴电压与q轴电压的三参数耦合分岔集,从而确定了该负载条件下能够保证超高速电动空压机稳定运行的d、q轴电压范围。
步骤(3),依据当前负载条件下d、q轴电压稳定范围,轨道定位控制子系统、轨道迁移控制子系统对输入的d、q轴解耦电压信号进行修正,输出d、q轴电压指令值
如图2所示,在进行d、q轴解耦电压修正时,采用分层控制模式,上层控制使用轨道定位控制,以超高速电动空压机d、q轴电压稳定数值范围为基础;控制器下层使用轨道迁移控制,对期望控制目标实施相应控制手段。
轨道定位控制子系统要求在相空间中存在收敛域C,使得在其邻近轨道相互收敛,将求解得到的d、q轴电压稳定数值范围作为收敛域C,分岔参数直接干预的超高速电动空压机扩稳控制的受控形式可以表示为:
式中:g为期望控制目标,S(t)为控制开关。
考虑到极限压缩超高速电动空压机调速时间的需要,将d、q轴电压平方之和最大值作为期望控制目标:
在完成目标域构建后,轨道迁移控制子系统将系统转入目标域内,期望控制目标g∈C,系统状态变量和期望控制目标有||x(t)-g||<ε
所述实施例为本发明的优选的实施方式,但本发明并不限于上述实施方式,在不背离本发明的实质内容的情况下,本领域技术人员能够做出的任何显而易见的改进、替换或变型均属于本发明的保护范围。