一种水果智能检测设备
文献发布时间:2023-06-19 10:10:17
技术领域
本发明属于水果智能检测分选技术领域,具体涉及一种水果智能检测设备。
背景技术
梨果成熟后,果农将采摘的梨果运送到收购站,由人工将包装袋剥离,剪除梨把,然后肉眼判断外观剔除不良品,再进行二次包装,装箱配重等分选操作,最后将封箱后的梨果运送至冷库储藏。人工的操作方式存在以下问题:1、完全依赖人工的经验、责任心以及动作频率等,因为人的主观性因素造成外观缺陷评定标准不统一,装箱时存在较大的偏差,影响产品的销售价格和客户的满意度。2、分选装箱过程需要果农、操作工、鉴定人员等参与,耗费大量的人力成本和时间成本,总体效率低。
现有的一些智能化分选设备能够大大提高水果的分选效率,但是机器分拣一般相对暴力,可以在苹果和柑橘等外表相对比较耐碰的水果中使用,但是对于外表比较娇脆的梨果不太适用。
人工检测梨果的外观质量效率低且检测标准不一,现有技术中比如对苹果和柑橘等的检测通常是将水果放在输送线或者托盘上进行平面拍照,通过照片分析水果的缺陷情况,但是并不能对水果进行360度全方位拍照,比如很难对水果的底部进行拍照,通过拍照实现智能外观检测仍存在检测不准确的问题。
发明内容
本发明的目的是针对外表娇脆的梨果通过人工分选效率低的缺陷,提供一种能够连续360°全方位检测梨果外观,且检测效率高的水果智能检测设备。
本发明解决其技术问题所采用的技术方案是:
一种水果智能检测设备,其特征在于:包括机架、安装在所述机架上的梨果抓取机构、分别设置在所述梨果抓取机构左右两侧的第一输送链和第二输送链以及安装在所述梨果抓取机构前端的检测机构;所述梨果抓取机构包括成方形排布的四个链轮组件,所述链轮组件包括同轴设置的上链轮和下链轮,四个上链轮通过上链条连接,四个下链轮通过下链条连接,上链条和下链条之间具有水平轨道,水平轨道的上方或下方具有与水平轨道走向一致的曲线滑道;所述曲线滑道上滑动安装有多个抓手组件,所述抓手组件包括:两端分别固定在所述上链条和下链条上的安装板、竖直方向滑动连接在所述安装板上的导向杆、固定连接在所述导向杆上且与所述曲线滑道滑动连接的第一滑块以及安装在所述导向杆下端的用来吸起梨果的气动吸头;所述安装板滑动连接在所述水平轨道上;所述曲线滑道为左右两侧低、前后两侧高的连续过渡的闭环滑道;所述气动吸头位于所述第一输送链和第二输送链的正上方,所述气动吸头将梨果吸起后送至所述检测机构处检测梨果外观质量。
进一步地,还包括安装在所述机架后端的驱动电机和连接在所述驱动电机输出轴上的第一链轮;位于所述驱机架后端的两个所述链轮组件的下链轮通过转轴同轴连接有第二链轮;所述第一链轮分别与位于所述机架后端的两个链轮组件的第二链轮通过链条连接。
进一步地,所述第一链轮和所述第二链轮之间还通过链条连接有第三链轮。
进一步地,所述驱动电机的输出轴上连接有主动锥齿轮,所述主动锥齿轮的左右两侧分别啮合有第一从动锥齿轮和第二从动锥齿轮,所述第一从动锥齿轮驱动所述第一输送链,所述第二从动锥齿轮驱动所述第二输送链。
进一步地,所述第一输送链和所述第二输送链上均设置有多个均布的用来对盛放梨果的托盘定位的定位块。
进一步地,所述检测机构包括检测箱,检测箱内具有四个对梨果的前后左右四周进行检测的四周拍照设备以及一个对梨果的下部进行检测的底部拍照设备。
进一步地,所述检测箱的上板面上具有使所述吸头或导向杆通过的通道。
进一步地,所述安装板上固定有竖向滑轨,所述竖向滑轨上滑动连接有第二滑块,所述导向杆与所述第二滑块固定连接。
进一步地,所述第二输送链的后端具有托盘输送装置,放置有梨果的托盘通过托盘输送装置自然掉落到绕在链轮上的第二输送链的输送链条上的定位块上后被向前转运。
更进一步地,所述托盘输送装置上具有对梨果的顶部进行监测的顶部拍照设备。
本发明的一种水果智能检测设备的有益效果是:
1、抓手组件沿曲线滑道强制升降,实现气动吸头下降接近梨果将梨果吸起以及吸引有梨果的吸头上升进入检测机构对梨果上四周和下部进行拍照,完成梨果五个方位的拍照,将拍照图像发生至控制系统,结合梨果进入检测设备前对梨果的顶部进行拍照的图像,综合判断分析梨果的外观,分拣出不良品。检测标准统一,能够实现全方位360度的连续检测,检测效率高。
2、通过一个驱动电机同时带动向前运动的第二输送链以及检测完成后向后运送的第一输送链,并且驱动电机同时驱动链轮组件运动,保证每个托盘上方对应一个气动吸头,气动吸头和托盘始终保持一对一对应,不会出现气动吸头向下运动吸引不到梨果和放下梨果时放不到托盘上的现象。
3、梨果在进入本申请的检测设备前一直放在托盘上,进入第二输送链使也是托盘自然的落到定位块上,通过输送链条的转动向前运转,所有的检测过程没有坚硬的零部件接触梨果,不会对梨果造成损伤。
附图说明
下面结合附图和具体实施方式对本发明作进一步详细的说明。
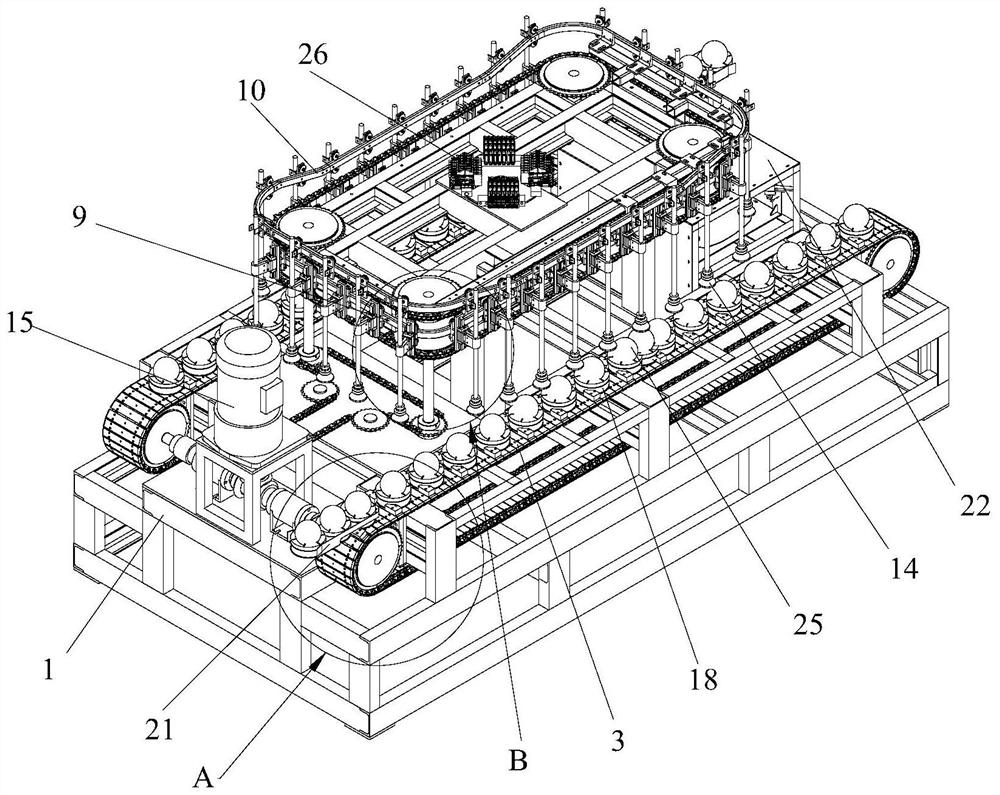
图1是本发明实施例整体立体结构图;
图2是本发明实施例主视图;
图3是本发明实施例俯视图;
图4是图1中A部放大图;
图5是图1中B部放大图;
图6是本发明实施例部分结构图;
图7是本发明实施例驱动原理图;
图8是本发明实施例检测箱结构图。
图中:1、机架,2、第一输送链,3、第二输送链,4、检测机构,5、上链轮,6、下链轮,7、上链条,8、下链条,9、水平轨道,10、曲线滑道,11、安装板,12、导向杆,13、第一滑块,14、气动吸头,15、驱动电机,16、第一链轮,17、第二链轮,18、托盘,19、竖向滑轨,20、第二滑块,21、托盘输送装置,22、检测箱,221、通道,23、四周拍照设备,24、底部拍照设备,25、梨果,26、配气系统,27、第三链轮,28、主动锥齿轮,29、第一从动锥齿轮,30、第二从动锥齿轮,31、定位块。
具体实施方式
现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
如图1-图8所示的本发明的一种水果智能检测设备的具体实施例,本实施例中,以梨果25在第二输送链3上向检测机构4方向运送为前,检测完成后放在第一输送链2上远离检测机构4方向运送为后,所谓的“前”“后”“左”“右”只是为了便于理解技术方案,各零部件调换方向能够实现本申请技术效果的技术方案同样应在本发明的保护范围内。
本实施例中以梨果25为例,本申请的技术方案同样适用于与梨果外观相似的苹果、橘子、柚子、橙子等气动吸头14能够吸起的水果。本申请的方案应用在除梨果外其他的水果检测仍适用。
参见图1-8,水果智能检测设备包括机架1、安装在机架1上的梨果抓取机构、分别设置在梨果抓取机构左右两侧的第一输送链2和第二输送链3以及安装在梨果抓取机构前端的检测机构4;梨果抓取机构包括成方形排布的四个链轮组件,链轮组件包括同轴设置的上链轮5和下链轮6,四个上链轮5通过上链条7连接,四个下链轮6通过下链条8连接,上链条7和下链条8之间具有水平轨道9,水平轨道9的上方或下方具有与水平轨道9走向一致的曲线滑道10;曲线滑道10上滑动安装有多个抓手组件,抓手组件包括:两端分别固定在上链条7和下链条8上的安装板11、竖直方向滑动连接在安装板11上的导向杆12、固定连接在导向杆12上且与曲线滑道10滑动连接的第一滑块13以及安装在导向杆12下端的用来吸起梨果25的气动吸头14;安装板11滑动连接在水平轨道9上;曲线滑道10为左右两侧低、前后两侧高的连续过渡的闭环滑道;气动吸头14位于第一输送链2和第二输送链3的正上方,气动吸头14将梨果25吸起后送至检测机构4处检测梨果25外观质量。
参见图1、图2、图3、图6和图7,第一输送链2、第二输送链3以及梨果抓取机构均通过同一个驱动电机15驱动,驱动电机15通过支架安装在机架1后端,驱动电机15的输出轴上同轴安装有第一链轮16和主动锥齿轮28,位于机架1后端的两个链轮组件的下链轮6通过转轴同轴连接有第二链轮17;第一链轮16和第二链轮17之间还具有用来对链条导向的第三链轮27,第一链轮16分别与两侧的第二链轮17通过链条连接,第一链轮16和第二链轮17之间的链条上连接有第三链轮27。
主动锥齿轮28的左右两侧分别啮合有第一从动锥齿轮29和第二从动锥齿轮30,第一从动锥齿轮29与第一输送链2的驱动链轮同轴连接;第二从动锥齿轮30与第二输送链3的驱动链轮同轴连接,第一从动锥齿轮29和第二从动锥齿轮30的转向相反,所以第一输送链2从前向后输送,第二输送链3从后向前输送且同步输送。
参见图4,第二输送链3的后端具有托盘输送装置21,放置有梨果25的托盘18通过托盘输送装置21自然掉落到第二输送链3前端绕在链轮上的输送链条上的定位块31上后被向前转运。第一输送链2和第二输送链3上均设置有多个均布的用来对盛放梨果25的托盘18定位的定位块31。托盘18进入第二输送链3时,随着绕在第二输送链3的驱动链轮上的输送链上的定位块31向上转动,定位块31自然的卡住托盘输送装置21上的托盘18,随着定位块31的继续向上转动,带动托盘18至输送链的水平向后输送段。检测设备通过托盘输送装置21与前面的其他工序自动连接起来。
参见图5,安装板11的两端固定连接在上链条7和下链条8上,安装板11上固定有竖向滑轨19,竖向滑轨19上滑动连接有第二滑块20,导向杆12与第二滑块20固定连接,导向杆12的上端与第一滑块13固定连接,第一滑块13通过两个V型尼龙导向轮滑动连接在曲线滑道10上,第二滑块20通过两个V型尼龙导向轮滑动连接在水平轨道9上,左右两侧的曲线滑道10与第一输送链2和第二输送链3平行,为了实现对输送链上的水果的吸起和放下,曲线滑道10的左侧段和右侧段较低,前侧段和后侧段较高,较高段的曲线滑道10和较低段的曲线滑道10自然圆弧过渡。
参见图8,检测机构4为设置在机架1前端的检测箱22,检测箱22内具有四个对梨果25的前后左右四周进行检测的四周拍照设备23以及一个对梨果25的下部进行检测的底部拍照设备24,检测箱22的上板面上具有使吸头或导向杆12通过的通道221。本实施例中检测箱22的四个角线位置分别设置一个四周拍照设备23,检测箱22的底部设置一个向上拍摄的底部拍照设备24,这样可实现对水果的五个方向的全方位图像采集,在水果进入本申请的检测设备前,水果一直是顶部朝上,先通过一个顶部拍照设备对水果的顶部外观进行采集;将采集到的六个方位的水果外观图像发送给控制器,通过控制器将图像叠合、对比分析,发现外观有缺陷的水果。可以在托盘输送装置21上设置对梨果25的顶部进行监测的顶部拍照设备。
配气系统26设置在机架1的顶部,配气系统26采用28路集成配气滑环,正好对应28套气动吸头14,每秒可实现对6个梨果外观的检测。
本发明的具体工作过程为:
放置有梨果25的托盘18运送至托盘输送装置21处,定位块31将托盘18一个个带起至第二输送链3上,随着气动吸头14沿曲线滑道10下降,气动吸头14将梨果25吸起后继续向前运动,吸引有梨果25的气动吸头14运送到机架1前端的检测箱22处随曲线滑道10上升,导向杆12从检测箱22中间的滑道中经过,此时四周拍照设备23和底部拍照设备24对梨果25进行拍照并将采集的图像发送给控制器,气动吸头14沿着曲线滑道10运动到第一输送链2上方后逐渐下降,气动吸头14下降到一定高度后,将梨果25松开,梨果25自然掉落到位于第一输送链2上的托盘18上,通过第一输送链2将检测完成的梨果25输送到下一道工序。
本实施例通过一个驱动电机15同时带动向前运动的第二输送链3以及检测完成后向后运送的第一输送链2,并且驱动电机15同时驱动链轮组件运动,保证每个托盘18上方对应一个气动吸头14,气动吸头14和托盘18始终保持一对一对应,不会出现气动吸头14向下运动吸引不到梨果25和放下梨果25时放不到托盘18上的现象。梨果25在进入本申请的检测设备前一直放在托盘18上,进入第二输送链3使也是自然的落到定位块31上,通过输送链条的转动向前运转,所有的检测过程没有坚硬的零部件接触梨果25,不会对梨果25造成损伤。
本发明实施例通过图像对比分析检测,检测标准统一,能够实现全方位360度的连续检测,检测效率高。
应当理解,以上所描述的具体实施例仅用于解释本发明,并不用于限定本发明。由本发明的精神所引伸出的显而易见的变化或变动仍处于本发明的保护范围之中。
- 一种水果智能检测设备
- 一种智能卡检测设备的顶柱结构和一种智能卡检测设备