一种自行走设备的初始粗对准方法和自行走设备
文献发布时间:2023-06-19 10:16:30
技术领域
本发明属于设备控制技术领域,具体涉及一种自行走设备的初始粗对准方法和自行走设备。
背景技术
不论是在割草机器人中,还是在其他的导航应用中,获取惯性器件(IMU)输出的航向角度与正北的夹角,都是实现精确定位的前提条件之一。常用的方法有:1.使用磁力计测量输出;2.使用IMU输出的原始信息计算姿态矩阵,进而解算角度;3.采用精确的外部基准源,将基准源和IMU输出做差得到偏差角。第1种方法,磁力计易受周围环境和磁场变化的影响,第2种方法要求IMU必须输出原始信息,且涉及到矩阵运算导致运算量大,并且对IMU的测量精度也有要求,第3种方法比如使用GPS差分技术获取准确的基准,缺点就是硬件成本高。
发明内容
针对初始粗对准中获取IMU航向角与正北夹角的不足,本发明提出了一种简单、实用的自行走设备的初始粗对准方法和自行走设备。
为实现以上目的的技术解决方案如下:
一种自行走设备的初始粗对准方法,所述自行走设备包括主控模块、行走模块和导航模块,所述导航模块包括IMU模块和GPS模块,所述方法包括以下步骤:
步骤一:IMU模块将航向角信息
步骤二:主控模块通过行走模块控制自行走设备行走,IMU模块将最新航向角信息
步骤三:导航模块根据
步骤四:判断IMU模块的数据是否稳定,若不稳定则从第步骤一重新开始,若稳定则累加并存储IMU模块信息输出数量k
步骤五:当设备进行距离s大于预设值s
进一步地,所述步骤二中自行走设备行走过程中行走模块(2)调整设备前进方向,使
进一步地,所述行走模块(2)包括行走电机。
进一步地,所述步骤二中自行走设备行走过程中保持直线行走。
进一步地,步骤三中的第一航向角均值
进一步地,所述步骤四中判断IMU模块(4)和GPS模块(5)的数据是否稳定的方法为:计算当前数据与当前均值的差值以及当前数据与上一次数据的差值,判断当前数据与当前均值的差值以及当前数据与上一次数据的差值是否均小于预设值,若否则认为数据不稳定,若是则认为数据稳定。
进一步地,所述预设值为2°-5°。
进一步地,所述装置包括所述的主控模块、行走模块和导航模块。
一种自行走设备,所述自行走设备包括所述的初始粗对准装置。
进一步地,所述自行走设备是智能割草机。
与现有技术相比,本发明的有益效果是:
(1)本发明采用控制机器人直线行走的方式获取IMU和GPS的航向偏差,在机器人直线行走时使用数据稳定判别方法,剔除不良数据,保证了结果的准确性;
(2)本发明控制机器人直线行走时使用实时计算平均值方法,提高了数据敏感性和准确性;
(3)本发明对准方法避免了复杂的矩阵运算,且对外部基准源(GPS)测量精度没有太高要求,经过测试可将偏差角粗对准在3~5度范围内。
附图说明
图1是本发明自行走设备的初始粗对准装置的系统结构示意图。
图2是计算均值的流程图。
图3为判定数据是否稳定的流程图。
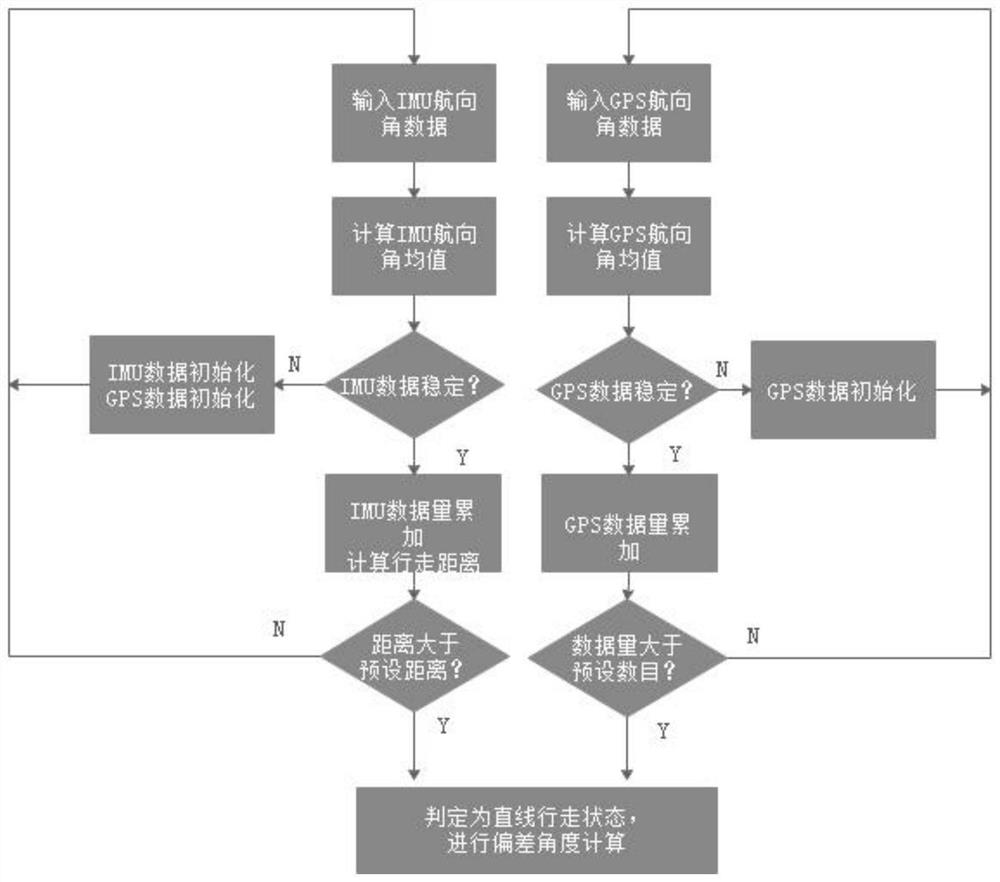
图4为判定直线行走计算偏差角度的流程图。
图中,1为主控模块,2为行走模块,3为导航模块,4为IMU模块,5为GPS模块。
具体实施方式
下面结合附图对本发明作进一步的详细描述。
图1为本发明自行走设备的初始粗对准装置的系统结构示意图,本实施例将自行走设备选择为智能割草机为例具体说明:智能割草机的初始粗对准装置,包括主控模块1、行走模块2和导航模块3,所述导航模块包括IMU模块4和GPS模块5,所述主控模块1能够控制行走模块2实现智能割草机的行走动作,所述主控模块1还能够接收导航模块3的数据。
结合图4,采用上述初始粗对准装置实现本发明的初始粗对准方法包括以下步骤:
步骤一:IMU模块4将航向角信息
步骤二:主控模块1通过行走模块2控制割草机行走,IMU模块4将最新航向角信息
步骤三:导航模块3根据
步骤四:判断IMU模块4的数据是否稳定,若不稳定则从第步骤一重新开始,若稳定则累加并存储IMU模块4信息输出数量k
步骤五:当割草机进行距离s大于预设值s
作为优选的方案,所述步骤二中自行走设备行走过程中行走模块2调整割草机前进方向,使
作为优选的方案,所述行走模块2包括行走电机。
作为优选的方案,所述步骤二中割草机行走过程中保持直线行走。
作为优选的方案,结合图2,步骤三中的第一航向角均值
作为优选的方案,结合图3,所述步骤四中判断IMU模块(4)和GPS模块(5)的数据是否稳定的方法为:计算当前数据与当前均值的差值以及当前数据与上一次数据的差值,判断当前数据与当前均值的差值以及当前数据与上一次数据的差值是否均小于预设值(例如选择为2°-5°之间),若否则认为数据不稳定,若是则认为数据稳定。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种自行走设备的初始粗对准方法和自行走设备
- 用于自动行走设备的行走轮与自动行走设备