一种节能环保的垃圾收集自动化辅助装置
文献发布时间:2023-06-19 10:25:58
技术领域
本发明属于垃圾收集技术领域,尤其涉及一种节能环保的垃圾收集自动化辅助装置。
背景技术
人们在日常生活和工业生产中会产生大量的废物垃圾,这些垃圾直接投放到环境中的话,不仅会对环境造成污染破坏,还可能滋生病毒细菌,造成病毒传染,都会危及到人类的生存,因此,为了保护环境,提高生活环境的舒适度以及可持续发展,需要对垃圾进行收集再处理。
垃圾按不同的种类有不同的处理方法,厨余垃圾需要进行固液分离后再分别进行净化处理,建筑生产中的建筑垃圾,可将钢铁等金属分筛出来后再加工利用,这些进行处理后的固体垃圾,为了减少占地面积以及便于存放和运输,需要进行再次压缩,目前的工作方法为通过压缩机将垃圾进行压缩,然后再通过收集桶等设备将垃圾收集起来,待一个桶装满后,再更换另外一个进行收集,该过程一般是人工操作,费时费力,一些可自动化操作的机械也需要电力驱动,不够节能环保。
于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种节能环保的垃圾收集自动化辅助装置,以期达到更具有更加实用价值性的目的。
发明内容
为了解决上述技术问题,本发明提供一种节能环保的垃圾收集自动化辅助装置,由以下具体技术手段所达成:
一种节能环保的垃圾收集自动化辅助装置,包括底座,底座固定安装在下料口的下方,所述底座的正面转动安装有转轴,转轴的外侧通过连杆固定套接有主环,底座的正面且位于主环的背面转动安装有副环,底座的正面设置有支撑副环的支撑轮,主环的内部活动插接有均匀分布的圆柱,圆柱的背面通过铰接板与副环活动连接,圆柱的正面且位于主环的正面固定连接有垂座,垂座的内部滑动安装有收集盒,收集盒的底部安装有支撑弹簧,收集盒的正面固定连接有磁块一,连杆的正面固定连接有与磁块一对应的磁块二,下料口的正面且位于主环的上方转动连接有转板,下料口的左侧且位于主环与转板之间固定连接有卡座,卡座的内部滑动插接有升降杆,升降杆的外侧且位于卡座的内部活动套接有活动座,升降杆的外侧且位于活动座的内部固定套接有挡环,升降杆的外侧且位于挡环和活动座的内底壁之间活动套接有动力压簧,升降杆的外侧且位于活动座和卡座的内底壁之间活动套接有复位弹簧,卡座的内部活动插接有与活动座对应的活动挡块,升降杆的右侧底部固定连接有从动板,收集盒的左侧顶部固定连接有与从动板对应的压板,主环的环侧壁上设置有均匀分布的舵杆,转板的底部左端固定连接有与舵杆对应的斜杆。
进一步的,所述副环与主环的尺寸相同,且副环与主环的圆心上下错开。
进一步的,所述铰接板位于主环与副环之间,铰接板与副环和圆柱的连接关系均为转动连接,主环和副环通过铰接板组成平行四边形机构,当主环旋转时,通过铰接板带动副环旋转,同时可保证垂座始终处于垂直的状态。
进一步的,所述磁块一与磁块二相对面的一侧磁性相反,当收集盒转至右上方时,磁块一与磁块二对齐,收集盒在磁块间的吸力作用下向下移动。
进一步的,所述转板通过安装轴活动安装在下料口的正面,且安装轴上设置有复位扭簧,下料口的正面且位于转板上方的左侧设置有限位板,转板在限位板和复位扭簧的作用下保持稳定。
进一步的,所述升降杆的顶端与转板活动铰接,升降杆的外侧且位于卡座的下方设置有限位块,当升降杆向下移动时,会带动转板的左端向下偏转。
进一步的,所述活动座呈U型状,活动座的右侧开设有与活动挡块对应的斜坡。
进一步的,所述活动挡块包括滑块,滑块的右端安装有复位件,滑块的顶部左端转动连接有棘板,且滑块的左端且位于棘板的下方设置有台阶,使得棘板只能向上偏转,棘板可阻止活动座下移,当活动座上移时,棘板向上偏转,不会对活动座的上移造成阻碍。
进一步的,所述舵杆与卡座前后错开,避免二者的运动相互阻碍。
有益效果
与现有技术相比,本发明具有如下有益效果:
1.处理后的垃圾块经由下料口进入收集盒内,最上方的收集盒内收集满时,在重力作用下向下移动并与下料口分离,收集盒通过压板挤压从动板和升降杆下移,升降杆带动转板的左端向下偏转,转板上的斜杆挤压舵杆,进而带动主环逆时针旋转,使得该已装满的收集盒与下料口分开,同时右侧的空收集盒转至与下料口对齐,实现了在收集盒装满之后自动更换的功能。
2.右侧的收集盒在由右上角向正上方旋转的过程中,磁块一与磁块二对齐,收集盒在磁块间的吸力作用下向下移动,避免了收集盒碰撞到下料口,当收集盒旋转至正上方后,磁块一与磁块二,失去了磁块间的吸力作用,收集盒在支撑弹簧的推动下向上移动,套接在下料口的外侧,该结构可有效的避免垃圾块在经由下料口下落时掉落到收集盒外侧的情况发生,收集工作更为可靠高效。
3.该装置通过收集盒在收集垃圾块过程中的重力变化为动力源,并辅以磁力来保证收集盒与下料口的对接,自动进行收集盒的更换,无需额外设置电力驱动装置,结构简单,节能环保,使用方便。
4.通过设置卡座、活动座和动力压簧,动力压簧会为升降杆提供向下的冲击力,使得转板上的斜杆能快速挤压舵杆,最终为主环的旋转提供动力支持,保证了主环的旋转幅度。
5.主环和副环通过铰接板组成平行四边形机构,当主环旋转时,通过铰接板带动副环旋转,同时可保证垂座始终处于垂直的状态,进而保证了收集盒向上移动套在下料口的动作稳定性,使用安全可靠。
附图说明
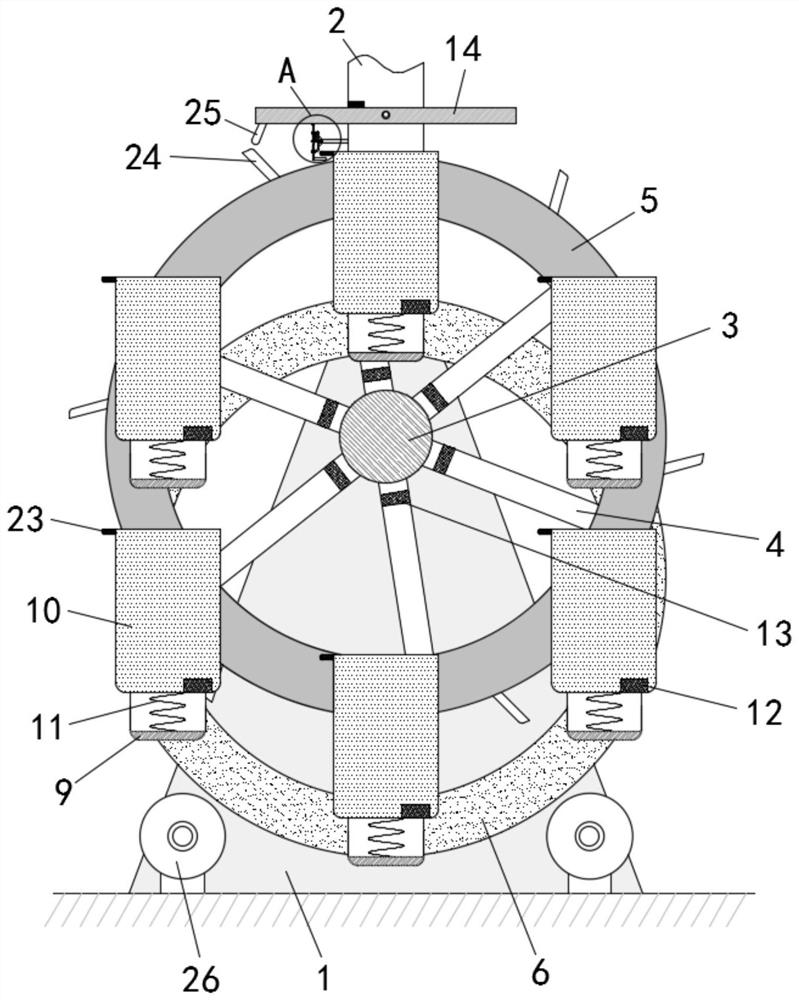
图1是本发明正面剖视图;
图2是本发明主环与副环连接结构正面示意图;
图3是本发明图1中A部分放大图;
图4是本发明收集盒安装结构示意图。
图中:1、底座;2、下料口;3、转轴;4、连杆;5、主环;6、副环;7、圆柱;8、铰接板;9、垂座;10、收集盒;11、支撑弹簧;12、磁块一;13、磁块二;14、转板;15、卡座;16、升降杆;17、活动座;18、挡环;19、动力压簧;20、复位弹簧;21、活动挡块;22、从动板;23、压板;24、舵杆;25、斜杆;26、支撑轮。
具体实施方式
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式以及附图说明,进一步阐述本发明的优选实施方案。
实施例:
如附图1至附图4所示:
本发明提供一种节能环保的垃圾收集自动化辅助装置,包括底座1,底座1固定安装在下料口2的下方,底座1的正面转动安装有转轴3,转轴3的外侧通过连杆4固定套接有主环5,底座1的正面且位于主环5的背面转动安装有副环6,底座1的正面设置有支撑副环6的支撑轮26,主环5的内部活动插接有均匀分布的圆柱7,圆柱7的背面通过铰接板8与副环6活动连接,圆柱7的正面且位于主环5的正面固定连接有垂座9,垂座9的内部滑动安装有收集盒10,收集盒10的底部安装有支撑弹簧11,收集盒10的正面固定连接有磁块一12,连杆4的正面固定连接有与磁块一12对应的磁块二13,下料口2的正面且位于主环5的上方转动连接有转板14,下料口2的左侧且位于主环5与转板14之间固定连接有卡座15,卡座15的内部滑动插接有升降杆16,升降杆16的外侧且位于卡座15的内部活动套接有活动座17,升降杆16的外侧且位于活动座17的内部固定套接有挡环18,升降杆16的外侧且位于挡环18和活动座17的内底壁之间活动套接有动力压簧19,升降杆16的外侧且位于活动座17和卡座15的内底壁之间活动套接有复位弹簧20,卡座15的内部活动插接有与活动座17对应的活动挡块21,升降杆16的右侧底部固定连接有从动板22,收集盒10的左侧顶部固定连接有与从动板22对应的压板23,主环5的环侧壁上设置有均匀分布的舵杆24,转板14的底部左端固定连接有与舵杆24对应的斜杆25。
其中,副环6与主环5的尺寸相同,且副环6与主环5的圆心上下错开。
其中,铰接板8位于主环5与副环6之间,铰接板8与副环6和圆柱7的连接关系均为转动连接,主环5和副环6通过铰接板8组成平行四边形机构,当主环5旋转时,通过铰接板8带动副环6旋转,同时可保证垂座9始终处于垂直的状态。
其中,磁块一12与磁块二13相对面的一侧磁性相反,当收集盒10转至右上方时,磁块一12与磁块二13对齐,收集盒10在磁块间的吸力作用下向下移动。
其中,转板14通过安装轴活动安装在下料口2的正面,且安装轴上设置有复位扭簧,下料口2的正面且位于转板14上方的左侧设置有限位板,转板14在限位板和复位扭簧的作用下保持稳定。
其中,升降杆16的顶端与转板14活动铰接,升降杆16的外侧且位于卡座15的下方设置有限位块,当升降杆16向下移动时,会带动转板14的左端向下偏转。
其中,活动座17呈U型状,活动座17的右侧开设有与活动挡块21对应的斜坡。
其中,活动挡块21包括滑块,滑块的右端安装有复位件,滑块的顶部左端转动连接有棘板,且滑块的左端且位于棘板的下方设置有台阶,使得棘板只能向上偏转,棘板可阻止活动座17下移,当活动座17上移时,棘板向上偏转,不会对活动座17的上移造成阻碍。
其中,舵杆24与卡座15前后错开,避免二者的运动相互阻碍。
本实施例的具体使用方式与作用:
本发明中,初始状态下,最上方的收集盒10套在下料口2的外侧,转板14处于水平位置,如图1所示;活动挡块21在复位件的作用下向左伸出,将活动座17卡在上方,如图3所示。
处理后的垃圾块经由下料口2进入收集盒10内,当最上方的收集盒10内收集满时,该收集盒10在重力作用下向下移动并与下料口2上下错开,收集盒10通过压板23挤压从动板22和升降杆16下移,在升降杆16下移的过程中,由于活动座17被活动挡块21卡住,因此会通过挡环18和活动座17带动动力压簧19压缩蓄能,当动力压簧19蓄能足够后,使得活动座17将活动挡块21挤压右移,然后动力压簧19释放能量,给予升降杆16以向下的冲击力,带动升降杆16快速下移,升降杆16带动转板14的左端向下偏转,转板14上的斜杆25挤压舵杆24,进而带动主环5逆时针旋转,使得该已装满的收集盒10与下料口2分开,同时右侧的空收集盒10转至与下料口2对齐,实现了在收集盒10装满之后自动更换的功能。
右侧的收集盒10在由右上角向正上方旋转的过程中,磁块一12与磁块二13对齐,收集盒10在磁块间的吸力作用下向下移动,避免了收集盒10碰撞到下料口2,当收集盒10旋转至正上方后,磁块一12与磁块二13,失去了磁块间的吸力作用,收集盒10在支撑弹簧11的推动下向上移动,套接在下料口2的外侧,该结构可有效的避免垃圾块在经由下料口2下落时掉落到收集盒10外侧的情况发生,收集工作更为可靠高效;该装置通过收集盒10在收集垃圾块过程中的重力变化为动力源,并辅以磁力来保证收集盒10与下料口2的对接,自动进行收集盒10的更换,无需额外设置电力驱动装置,结构简单,节能环保,使用方便。
通过设置卡座15、活动座17和动力压簧19,动力压簧19会为升降杆16提供向下的冲击力,使得转板14上的斜杆25能快速挤压舵杆24,最终为主环5的旋转提供动力支持,保证了主环5的旋转幅度。
主环5和副环6通过铰接板8组成平行四边形机构,当主环5旋转时,通过铰接板8带动副环6旋转,同时可保证垂座9始终处于垂直的状态,进而保证了收集盒10向上移动套在下料口2的动作稳定性,使用安全可靠。
利用本发明所述技术方案,或本领域的技术人员在本发明技术方案的启发下,设计出类似的技术方案,而达到上述技术效果的,均是落入本发明的保护范围。
- 一种节能环保的垃圾收集自动化辅助装置
- 一种节能环保的工业自动化夹具用自动润滑的辅助设备