一种智能变焦系统及视觉训练变焦眼镜
文献发布时间:2023-06-19 10:25:58
技术领域
本发明属于光学变焦设备技术领域,具体涉及的是一种智能变焦系统及视觉训练变焦眼镜。
背景技术
现有的变焦技术主要应用于单镜片光学变焦,也称渐进多焦镜片;该种镜片主要缺陷在于变焦范围小,变焦通道窄,无效光学区域大等特点,影响变焦视觉效果,该种镜片仅作为中老年老花的解决方案之一;至今,还未出现一种有效的线性变焦技术以视觉训练的方式用于近视防控。
发明内容
本发明针对以上技术的不足,提供一种运行平稳,位移精确度较高的视觉训练变焦眼镜。
为实现以上目的,本发明通过以下技术方案予以实现:一种智能视觉训练变焦眼镜,是由眼镜上盖壳、眼镜下盖壳、自由曲面镜片组、微型电机、左右镜腿、电池及扬声器组成,其特征在于:还包括有运动模组、控制线路板;所述的自由曲面镜片组连接在眼镜下盖壳的下方,而控制线路板及运动模组分别安装在眼镜下盖壳内;并且眼镜下盖壳内并列设置有充电线吸附磁铁。
所述的自由曲面镜片组包括有两组镜片,一组为前自由曲面镜片,一组为后自由曲面镜片,并且每片自由曲面镜片上分别设置了左眼光学区和右眼光学区。
所述的运动模组包括有金属上壳、金属下壳及安装在金属上壳与金属下壳之间的传动装置;所述的传动装置内置在金属下壳的空腔内部,传动装置是由微型电机、与微型电机相连接的联轴器、与联轴器另一端相连接的齿轮一、与齿轮一相连接安装的丝杆一、与齿轮一相互啮合传动的齿轮二及与齿轮二相连接安装的丝杆二组成;所述的丝杆一上穿入安装有滑块一,丝杆二上穿入安装有滑块二;该微型电机置于运动模组的金属下壳腔内,并驱动丝杆一6运动,从而带动滑块一5和后自由曲面镜片向一个方向移动,进一步,由于齿轮一和齿轮二通过咬合运动使得前自由曲面镜片向相反的方向移动,从而实现前、后自由曲面镜片中央重叠区域线性变焦。
所述丝杆一的一端通过左微型轴承安装在金属下壳的一端腔内,丝杆一另一端安装的齿轮一与联轴器之间还安装有右微型轴承。
所述丝杆二与丝杆一并列在金属下壳空腔内,并且丝杆二的一端也是通过左微型轴承安装在金属下壳的一端腔内,丝杆二另一端依次安装有齿轮二和右微型轴承。
所述的齿轮一与齿轮二相互啮合传动。
所述的联轴器上并列设置有计圈感受器切割扇叶一、计圈感受器切割扇叶二及在计圈感受器切割扇叶一与计圈感受器切割扇叶二之间设置有数个缓冲槽;所述联轴器的一端头设置有与丝杆一相插入连接的缺口槽,另一端头设置有与微型电机伸出杆连接的连接孔。
所述的滑块一呈T字状,滑块一的竖向边上分别设置有丝杆一螺纹孔、通孔及凹槽,滑块一的横向边上内置有长条形磁铁,该滑块一与后自由曲面镜片通过磁吸的方式连接起来。
所述的滑块二呈T字状,滑块二的竖向边上分别设置有丝杆二螺纹孔和通孔,滑块二的横向边上也内置有长条形磁铁,该滑块二与前自由曲面镜片通过磁吸的方式连接起来。
所述的滑块一及滑块二均为耐磨性塑胶材料构成。
所述的微型电机内置有编码器、太阳齿轮、行星齿轮、行星架、滚动轴承及伸出杆。
所述的控制线路板包括有控制主板和软板,所述的控制主板上主要包括有控制芯片MCU、三轴加速度传感器、蓝牙芯片、电机驱动芯片、音乐芯片、充电IC、无线通信模块、存储器及重力感应芯片;软板主要包括有软板一和软板二,所述的软板一包括佩戴传感器、计圈传感器、运动模组接线端和扬声器接线端;软板二包括测距传感器和显示屏连接器;测距传感器安装在眼镜下盖壳前端,而佩戴传感器安装在眼镜下盖壳的内侧;所述的控制主板分别与测距传感器、佩戴传感器、显示屏连接器、扬声器、电池及运动模组连接起来;控制主板上的无线通信模块接收到手机APP发送的运行规则数据及参数,并存储到存储中,同时向手机APP发送眼镜采用数据。
所述的控制芯片MCU对三轴加速度传感器采集的姿态数据和佩戴传感器采集的亮度、距离数据进行综合分析,判断眼镜是否处于佩戴状态,实现眼镜自动开关机、自动运行及停止动作。
本发明的另一目的是提供一种智能变焦系统,本系统的自由曲面镜片组在运动模组牵引下镜片光学重叠区域实现大范围线性变焦,变焦范围【M、N】,基础屈光度为D,系统将在使用者实际年龄基础上生成一套数据其自身的变焦运行规则。
1、变焦运行规则数据,是由使用者移动端APP设置好参数,包括年龄、眼屈光度和视功能参数,系统自动将移动端APP参数传输至远程服务器,运程服务器经过运算,生成一套基础版本的运行规则,并通过移动端APP发送给眼镜内部的无线通信模块,经控制芯片MCU处理解析后保存到存储器内;
2、控制芯片MCU用于获取三轴加速度传感器采集的姿态数据、测距传感器和佩戴传感器采集的亮度和距离数据,经分析处理后输出控制信号到微型电机,通过微型电机驱动运动模组运行,从而带动自由曲面镜片组的移动;控制芯片MCU读取云数据库运行规则数据,提取自由曲面变焦镜片运行速度、移动范围、重复次数数据,通过微型电机驱动运动模组以设定的系列速度、系列移动范围和系列重复次数执行变焦移动。
3、具体的说,本系统控制芯片MCU以一定时间周期,采集三轴加速度传感器输出的加速度数据,求三个轴平均值作为样本数据,该周期内会出现N个样本数据,N个样本数据中最大值与最小值之间的差值定义为判断数据一,将该差值与预先设置的符合佩戴特征的三轴加速度变化率阈值进行对比,判断眼镜是否存在有效的振动,若差值大于阈值,且显示屏幕出现电量图标,则判断第一佩戴条件满足;继续判断,三轴加速器输出加速度数据,再次判断差值与阈值大小,若差值大于阈值且显示屏幕出现运动小人图标,则判断第二佩戴条件之一;在15秒内,佩戴传感器障碍物距离小于一定范围时,眼镜开始运动,且该运动规则按照储存区的运动规则数据执行。
本发明有益效果体现在于,与现有技术相比,本发明控制电路板上集成控制芯片MCU、存储器、蓝牙芯片、三轴加速度传感器、佩戴传感器、测距传感器、充电芯片IC、音乐芯片,实现数据通信、数据存储、用户佩戴行为检测、用户用眼距离检测、电池充电管理、语音提示;通过三轴加速度传感器、亮度及近距离检测传感器的数据,检测眼镜的姿态及用户的佩戴行为,实现眼镜自动开关机、自动运行、停止功能,增强了产品智能化程度,提高了用户使用感受。
附图说明
此处所说明的附图用来提供对本发明的进一步理解,构成本申请的一部分:
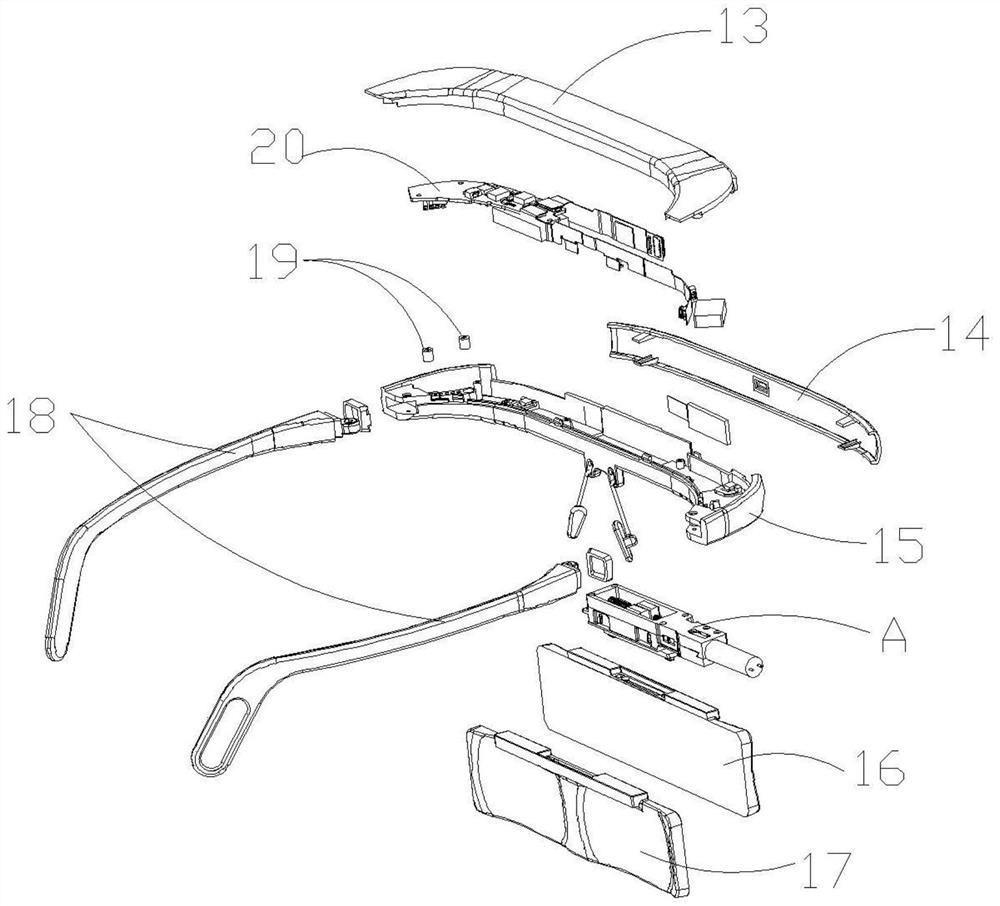
图1为本发明分解结构示意图。
图2为图1的整体组装示意图。
图3为本发明中的运动模组示意示意图。
图4为本发明中的金属下壳结构示意图。
图5为本发明中的联轴器结构示意图。
图6为本发明中的滑块一结构示意图。
图7为本发明中的滑块二结构示意图。
图中:1、金属上壳;2、滑块二;3、丝杆二;4、左微型轴承;5、滑块一;6、丝杆一;7、右微型轴承;8、联轴器;9、金属下壳;10、微型电机;11、齿轮一;12、齿轮二;13、眼镜上盖壳;14、壳体前盖;15、眼镜下盖壳;16、前自由曲面镜片;17、后自由曲面镜片;18、左右镜腿;19、充电线吸附磁铁;20、控制线路板。
201、丝杆二螺纹孔;202、通孔;501、丝杆一螺纹孔;502、通孔;801、计圈感受器切割扇叶一;802、计圈感受器切割扇叶二;803、缺口槽;804、缓冲槽;805、连接孔。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
请参阅图1-3,一种智能视觉训练变焦眼镜,是由眼镜上盖壳13、眼镜下盖壳15、眼镜前壳14、自由曲面镜片组、左右镜腿18、电池及扬声器组成,其中还包括有运动模组A、控制线路板20;所述的自由曲面镜片组连接在眼镜下盖壳15的下方,而控制线路板20及运动模组A分别安装在眼镜下盖壳15内;并且眼镜下盖壳15内并列设置有充电线吸附磁铁19,该充电线吸附磁铁19可以方便充电线进行表面吸附充电。
如图1所示,所述的自由曲面镜片组包括有两组镜片,一组为前自由曲面镜片16,一组为后自由曲面镜片17,并且每片自由曲面镜片上分别设置了左眼光学区和右眼光学区。
请参阅图3-7,所述的运动模组,包括有金属上壳1、金属下壳9及安装在金属上壳1与金属下壳9之间的传动装置;所述的传动装置内置在金属下壳9的空腔内部,传动装置是由微型电机10、与微型电机10相连接的联轴器8、与联轴器8另一端相连接的齿轮一11、与齿轮一11相连接安装的丝杆一6、与齿轮一11相互啮合传动的齿轮二12及与齿轮二12相连接安装的丝杆二3组成;所述的丝杆一6上穿入安装有滑块一5,丝杆二3上穿入安装有滑块二2;由于在金属下壳9的内腔内分别设置有各自安装的左、右微型轴承(4、7)的轴承腔,因此左、右微型轴承(4、7)直接卡装在轴承腔内,丝杆一6及丝杆二3分别通过各自的轴承进行安装固定;滑块一5与丝杆一6的安装是通过螺纹孔进行安装,因此丝杆一6的转动时,可以使得滑块一5在丝杆一6上作水平滑动;丝杆一6的动力来自于微型电机10的转动,带动联轴器8及齿轮一11的转动,而丝杆二2的动力来自于齿轮一11和齿轮二12之间的相互啮合进行传动;该微型电机10置于运动模组的金属下壳9腔内,并驱动丝杆一6运动,从而带动滑块一5和后自由曲面镜片17向一个方向移动,进一步,由于齿轮一11和齿轮二12通过咬合运动使得前自由曲面镜片16向相反的方向移动,从而实现前、后自由曲面镜片(16、17)中央重叠区域线性变焦。
如图3所示,所述丝杆一6的一端通过左微型轴承4安装在金属下壳9的一端腔内,丝杆一6另一端安装的齿轮一11与联轴器8之间还安装有右微型轴承7。
如图3所示,所述丝杆二3与丝杆一6并列在金属下壳9空腔内,并且丝杆二3的一端也是通过左微型轴承4安装在金属下壳9的一端腔内,丝杆二3另一端依次安装有齿轮二12和右微型轴承7。
所述的丝杆一、丝杆二的螺距一般为螺距一般为0.1~1.0mm,即螺纹丝杆旋转一周螺母直线运动0.1~1.0mm,由于螺纹丝杆的旋转受系统控制,可控制至少1/8圈的旋转,所以单根螺纹丝杆最小的控制移动距离在0.0125mm~0.125mm范围,两根螺纹丝杆相对运动的最小控制移动距离在0.025~0.25mm范围。
所述的齿轮一11与齿轮二12相互啮合传动。
如图3所示,所述的联轴器8上并列设置有计圈感受器切割扇叶一801、计圈感受器切割扇叶二802及在计圈感受器切割扇叶一801与计圈感受器切割扇叶二802之间设置有数个缓冲槽804;所述联轴器8的一端头设置有与丝杆一6相插入连接的缺口槽803,另一端头设置有与微型电机10伸出杆连接的连接孔805;在微型电机10工作中,缓冲槽804可缓冲微型电机10的非中心旋转带来的扭力增加;另外,联轴器8上设置的计圈感受器切割扇叶一801、计圈感受器切割扇叶二802在转动过程中,持续切割软板上的传感器内的感应磁场,达到控制旋转圈数,进而控制滑块一5和滑块二2的运行速度和位移,实现精细变焦的目的。
如图6所示,所述的滑块一5呈T字状,滑块一5的竖向边上分别设置有丝杆一螺纹孔501、通孔502及凹槽503,滑块一5的横向边上内置的N/S方向的长条形磁铁与后自由曲面镜片17通过磁吸的方式连接起来。
如图7所示,所述的滑块二2呈T字状,滑块二2的竖向边上分别设置有丝杆二螺纹孔201和通孔202,滑块二2的横向边上也内置有长条形磁铁,滑块内部内置的相反N/S方向的长条形磁铁与前自由曲面镜片16通过磁吸的方式连接起来。
所述的滑块一5及滑块二2均为耐磨性塑胶材料构成。
所述的微型电机10内置有编码器、太阳齿轮、行星齿轮、行星架、滚动轴承及伸出杆。
本发明运动模组A的安装顺序为:左右微型轴承(4、7)分别各自卡入到金属下壳9的轴承腔内进行安装固定,将滑块螺纹连接在各自的丝杆一6或丝杆二3上及将齿轮一111和齿轮二12各自安装在丝杆一6和丝杆二3的一端头上,再将丝杆一6和丝杆二3安装在左右微型轴承(4、7)之间,并且在丝杆一6的齿轮一11一端头上还继续安装有联轴器8,再将联轴器8安装固定在微型电机10的伸出杆上,最后将金属上壳1通过螺丝进行固定在金属下壳9上,安装完毕。
本发明变焦眼镜的安装顺序为:运动模组A安装在眼镜下盖壳15内,控制线路板20安装在运动模组A的上侧部位,进一步通过运动模组A的滑块一和滑块二上各自设置的长条形磁铁通过磁吸的方式与自由曲面镜片组相连接起,最后盖上眼镜上盖壳13和眼镜前壳14,并且装上左右眼镜腿18即可。
所述的控制线路板20包括有控制主板和软板,所述的控制主板上主要包括有控制芯片MCU、三轴加速度传感器、蓝牙芯片、电机驱动芯片、音乐芯片、充电IC、无线通信模块、存储器及重力感应芯片;软板主要包括有软板一和软板二,所述的软板一包括佩戴传感器、计圈传感器、运动模组接线端和扬声器接线端;软板二包括测距传感器和显示屏连接器;测距传感器安装在眼镜下盖壳15前端,而佩戴传感器安装在眼镜下盖壳15的内侧;所述的控制主板分别与测距传感器、佩戴传感器、显示屏连接器、扬声器、电池及运动模组连接起来;控制主板上的无线通信模块接收到手机APP发送的运行规则数据及参数,并存储到存储中,同时向手机APP发送眼镜采用数据。
所述的控制芯片MCU对三轴加速度传感器采集的姿态数据和佩戴传感器采集的亮度、距离数据进行综合分析,判断眼镜是否处于佩戴状态,实现眼镜自动开关机、自动运行及停止动作。
本发明一种智能变焦系统,本系统的自由曲面镜片组在运动模组A牵引下镜片光学重叠区域实现大范围线性变焦,变焦范围【M、N】,基础屈光度为D,系统将在使用者实际年龄基础上生成一套数据其自身的变焦运行规则。
1、变焦运行规则数据,是由使用者移动端APP设置好参数,包括年龄、眼屈光度和视功能参数,系统自动将移动端APP参数传输至远程服务器,运程服务器经过运算,生成一套基础版本的运行规则,并通过移动端APP发送给眼镜内部的无线通信模块,经控制芯片MCU处理解析后保存到存储器内;
2、控制芯片MCU用于获取三轴加速度传感器采集的姿态数据、测距传感器和佩戴传感器采集的亮度和距离数据,经分析处理后输出控制信号到微型电机,通过微型电机驱动运动模组运行,从而带动自由曲面镜片组的移动;控制芯片MCU读取云数据库运行规则数据,提取自由曲面变焦镜片运行速度、移动范围、重复次数数据,通过微型电机10驱动运动模组以设定的系列速度、系列移动范围和系列重复次数执行变焦移动。
3、具体的说,本系统控制芯片MCU以一定时间周期,采集三轴加速度传感器输出的加速度数据,求三个轴平均值作为样本数据,该周期内会出现N个样本数据,N个样本数据中最大值与最小值之间的差值定义为判断数据一,将该差值与预先设置的符合佩戴特征的三轴加速度变化率阈值进行对比,判断眼镜是否存在有效的振动,若差值大于阈值,且显示屏幕出现电量图标,则判断第一佩戴条件满足;继续判断,三轴加速器输出加速度数据,再次判断差值与阈值大小,若差值大于阈值且显示屏幕出现运动小人图标,则判断第二佩戴条件之一;在15秒内,佩戴传感器障碍物距离小于一定范围时,眼镜开始运动,且该运动规则按照储存区的运动规则数据执行。
当眼镜处于佩戴状态时,所述主控制板上的控制芯片MCU读取自由曲面镜片组运行规则数据,提取运行速度、目标位置(如-300°到+400°)和重复次数参数,通过微型电机10驱动运动模组A以设定的运行速度在目标位置-200°到+200°之间往复运行,直至达到相应重复次数,完成本条运行规则,继续加载下一条运行规则,按上述方式运行,直至所有运行规则被执行完毕,最终将重复执行最后一条运行规则数据。
所述微型电机10为微型直流微型电机,型号:006006-110,额定电压3VDC,微型电机直径6mm,带直径6mm、减速比1:110的行星轮减速箱。
软板一上的佩戴传感器包括第一光电传感器和第二光电传感器,与控制芯片MCU引脚相连,向控制芯片MCU输出信号。
以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
- 一种智能变焦系统及视觉训练变焦眼镜
- 一种智能变焦增强现实眼镜及其变焦镜片组合方法