挖掘机液压系统
文献发布时间:2023-06-19 10:38:35
技术领域
本发明挖掘机液压系统,属于挖掘机技术领域。
背景技术
挖掘机是开挖土壤的施工机械,总体结构包括工作装置、行走结构、回转机构、操纵机构等。其中工作装置可以细分为动臂、斗杆、铲斗等结构。一般施工时,通过直接操纵液压先导手柄来控制动臂、斗杆、铲斗来完成各种工况。
挖掘机的工况一般有平地工况、土方装车工况、刷坡开槽工况。而每一种工况下,动臂、斗杆、铲斗相互配合的快慢情况不一样,这就需要司机有足够的经验来应对不同的工况,司机经常需要不断的重复某一个动作,通过微调来达到工程质量的要求。这对工作效率与驾驶的舒适性都有很大的制约。
发明内容
本发明针对现有挖掘机在不同工况下,对司机的操作性要求较高,工作效率较低的情况下,提供挖掘机液压系统,来降低司机的操作难度,提高生产效率。
为了解决上述技术问题,本发明采用的技术方案为:挖掘机液压系统,包括大臂油缸、铲斗油缸、斗杆油缸、回转马达、与大臂油缸连接用于控制大臂油缸的大臂控制主阀、与铲斗油缸连接用于控制铲斗油缸的铲斗控制主阀、与斗杆油缸连接用于控制斗杆油缸的斗杆控制主阀、与回转马达连接用于控制回转马达的回转控制主阀、与上述各控制主阀两端的先导液控端连接的操纵手柄以及与上述各控制主阀连接的泵油系统,所述泵油系统包括柱塞变量泵、先导油泵和液压油箱,所述大臂控制主阀、铲斗控制主阀、斗杆控制主阀和回转控制主阀均并联设置在柱塞变量泵的工作油路上,所述大臂油缸、铲斗油缸、斗杆油缸、回转马达的进、出油口对应与大臂控制主阀、铲斗控制主阀、斗杆控制主阀和回转控制主阀的工作油路连通,所述先导油泵通过操纵手柄与上述各控制主阀两端的先导液控端连接,上述各控制主阀两端的先导液控端与操纵手柄之间的油路上均设置有比例电磁阀,所述比例电磁阀的进、出油路分别与上述各控制主阀的先导液控端和操纵手柄的工作油口连通,所述比例电磁阀的先导电控端均连接有控制器,所述控制器的一端连接在比例电磁阀的先导电控端上,所述控制器的另一端连接在人机界面上,所述人机界面用于对控制器进行操作及参数设定。
所述人机界面包括平地模式、土方模式、刷坡模式和自定义模式,所述人机界面通过控制器对比例电磁阀的先导电控端进行差异化信号控制,实现对八个所述比例电磁阀的开度进行调整。
本发明与现有技术相比具有的有益效果是:本发明可针对不同的工况对大臂、斗杆、铲斗、回转的配合速度进行合理的调整,同时也可通过参数的灵活调整,来适应不同的司机的使用习惯,从而提高作业的效率与舒适性。
附图说明
下面结合附图对本发明做进一步的说明。
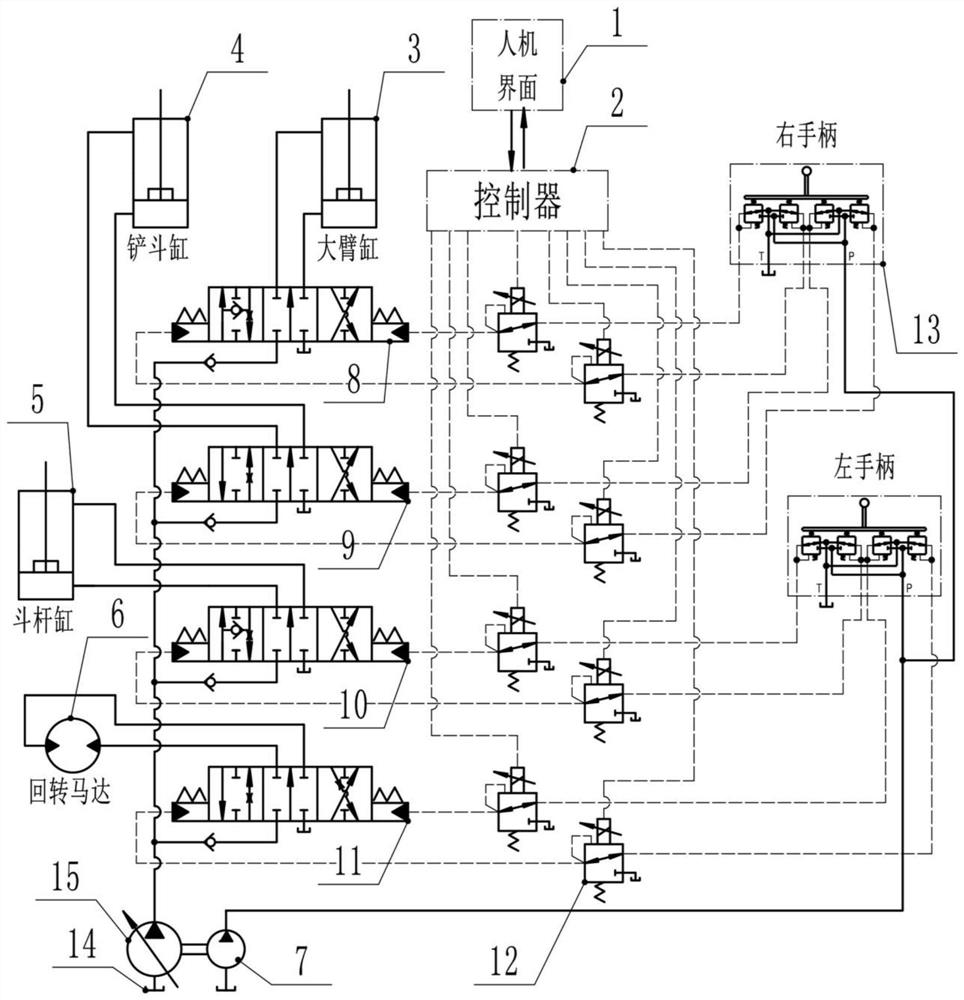
图1为本发明的原理示意图。
图2为本发明中人机界面程序框图。
图中:1为人机界面、2为控制器、3为大臂油缸、4为铲斗油缸、5为斗杆油缸、6为回转马达、7为先导油泵、8为大臂控制主阀、9为铲斗控制主阀、10为斗杆控制主阀、11为回转控制主阀、12为比例电磁阀、13为操纵手柄、14为液压油箱、15为柱塞变量泵。
具体实施方式
如图1、图2所示,本发明挖掘机液压系统,包括大臂油缸3、铲斗油缸4、斗杆油缸5、回转马达6、与大臂油缸3连接用于控制大臂油缸3的大臂控制主阀8、与铲斗油缸4连接用于控制铲斗油缸4的铲斗控制主阀9、与斗杆油缸5连接用于控制斗杆油缸5的斗杆控制主阀10、与回转马达6连接用于控制回转马达6的回转控制主阀11、与上述各控制主阀两端的先导液控端连接的操纵手柄13以及与上述各控制主阀连接的泵油系统,所述泵油系统包括柱塞变量泵15、先导油泵7和液压油箱14,所述大臂控制主阀8、铲斗控制主阀9、斗杆控制主阀10和回转控制主阀11均并联设置在柱塞变量泵15的工作油路上,所述大臂油缸3、铲斗油缸4、斗杆油缸5、回转马达6的进、出油口对应与大臂控制主阀8、铲斗控制主阀9、斗杆控制主阀10和回转控制主阀11的工作油路连通,所述先导油泵7通过操纵手柄13与上述各控制主阀两端的先导液控端连接,上述各控制主阀两端的先导液控端与操纵手柄13之间的油路上均设置有比例电磁阀12,所述比例电磁阀12的进、出油路分别与上述各控制主阀的先导液控端和操纵手柄13的工作油口连通,所述比例电磁阀12的先导电控端均连接有控制器2,所述控制器2的一端连接在比例电磁阀12的先导电控端上,所述控制器2的另一端连接在人机界面1上,所述人机界面1用于对控制器进行操作及参数设定。
所述人机界面1包括平地模式、土方模式、刷坡模式和自定义模式,所述人机界面1通过控制器2对比例电磁阀12的先导电控端进行差异化信号控制,实现对八个所述比例电磁阀12的开度进行调整。
本发明中控制器2为包括但不限于PLC模块的现有控制结构。
本发明涉及的挖掘机液压系统包括:大臂油缸、铲斗油缸、斗杆油缸、回转马达、与大臂油缸连接用于控制大臂油缸的大臂控制主阀、与铲斗油缸连接用于控制铲斗油缸的铲斗控制主阀、与斗杆油缸连接用于控制斗杆油缸的斗杆控制主阀、与回转马达连接用于控制回转马达的回转控制主阀、与各控制主阀两端的先导液控端连接的先导手柄、与控制主阀连接的泵油系统、与各控制主阀两端的先导液控端连接的比例电磁阀、与比例电磁阀连接的控制器、与控制器连接的人机界面。
所述人机界面可分上述三种不同工况对所述控制器进行参数设置,所述控制器可对所述八个比例电磁阀进行不同信号控制。通过差异化的控制信号,可对八个所述比例电磁阀的开度进行合理的配合,从而使大臂、斗杆、铲斗、回转等执行机构在不同的工况下动作的快慢进行合理的搭配,使司机操纵的时候,不必考虑手柄的微调,可以放心的全行程动作,提高作业的生产效率以及舒适性。
本实施例中的挖掘机液压系统用于挖掘机,油泵系统包括柱塞变量泵15、先导油泵7以及液压油箱14。
柱塞变量泵15从液压油箱14中吸取液压油并从泵口输出,通过大臂控制主阀8、铲斗控制主阀9、斗杆控制主阀10、回转控制主阀11分别向大臂油缸3、铲斗油缸4、斗杆油缸5、回转马达6供油,以提供挖掘机各执行元件所需要的动力。
先导油泵7从液压油箱14中吸取液压油并从泵口输出,通过操纵手柄13输出不同的先导控制压力,控制大臂控制主阀8、铲斗控制主阀9、斗杆控制主阀10、回转控制主阀11各阀口的开度,进而控制进入到各执行元件中的流量,实现挖掘机不同工况下的速度控制。
在操纵手柄13与各控制主阀两端的先导液控端之间均设置有比例电磁阀12,可线性控制各执行元件的回油背压,从而灵活的适应各种不同的工况需求。
在挖掘机进行平地作业时,需要斗杆快点,大臂慢点。这时候通过人机界面1进入到平地模式参数设置页面,对每个比例电磁阀12进行相应的电流参数大小进行设置,再通过控制器2向每个比例电磁阀12输出控制信号,使各控制主阀两端的先导液控端的先导压力作出相应的变化,从而改变各控制主阀的阀口开度,以便达到平地时所需的各执行元件的速度匹配。同样的在进行装车作业时,需要大臂快点,斗杆适当的慢点。这时候同样通过人机界面1进入到装车模式参数设置页面,对相应的参数进行设置,即可改变各控制主阀的开度,达到装车时的各执行元件的速度匹配。
另外在人机界面1中还设置有自定义模式,司机可通过自定义来设置适应自己操作习惯的电流参数,更好地增加了作业时的舒适性。
上面结合附图对本发明的实施例作了详细说明,但是本发明并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
- 挖掘机液压系统、挖掘机及挖掘机控制方法
- 基于挖掘机液压系统改造的汽车拆解机液压系统