一种自动旋转吸针装置
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及加样针收集分装领域,特别是涉及一种自动旋转吸针装置。
背景技术
一次性加样针是临床检验医疗设备中常用的耗材,在使用自动加样设备进行加样实验的过程中,需要经常使用一次性加样针用于液体的分配和转移。一次性加样针通常由塑胶材料经模具注塑成,现有的一次性加样针多为袋装,一次性加样针处于无序状态,这样在运输过程中容易将一次性加样针挤压变形,同时在实验过程中,仪器操作人员需要人工将散装的一次性加样针装入针盒,劳动强度高,效率低下,同时还容易造成污染。
针对以上情况,出现了一些一次性加样针自动化收集装置,将塑注成型的加样针通过落针板及导管直接落入针盒中进行收集,然而这种设备在使用过程中,仍会出现加样针在落针时出现倾斜,无法准确落入针盒的现象。因此,尚需对一次性加样针自动化收集装置进行改进。
发明内容
基于此,有必要提供一种自动旋转吸针装置,该自动旋转吸针装置能够对落下的加样针通过吸力进行抓取及定位,然后翻转,释放吸力,使加样针准确落入针盒中,该装置能够降低收集过程中的出错率,提高收集效率。
为实现上述目的,本发明提供了一种自动旋转吸针装置,采取以下技术方案:
一种自动旋转吸针装置,其特征在于,包括:吸针机构,所述吸针机构为板状,所述吸针机构的第一平面上设有排列分布的吸嘴,所述吸嘴用于吸取加样针,并对所述加样针进行定位;旋转机构,所述旋转机构与所述吸针机构连接,用于将所述吸针机构进行上下翻转;Z向运动机构,用于驱动吸针机构进行上下移动,Y向运动机构,用于驱动吸针机构进行左右移动。
进一步地,所述吸针机构的第二平面上设有与所述吸嘴连通的负压转接头,所述负压转接头与负压装置连接,用于给所述吸嘴提供吸取所述加样针的吸力。
进一步地,所述旋转机构包括摆动气缸、第一旋转支撑轴、第二旋转支撑轴、旋转轴承座、气缸座及第一安装板,所述第一安装板竖直设置于所述吸针机构的后侧,所述气缸座安装于所述第一安装板的一端,所述旋转轴承座安装于所述第一安装板的另一端,所述摆动气缸固定安装于所述气缸座上,所述第一旋转支撑轴的一端与摆动气缸的输出端连接,另一端与吸针机构连接,所述第二旋转支撑轴一端与吸针机构连接,另一端通过轴承与所述旋转轴承座连接,当所述摆动气缸运动时,旋转机构能够带动所述吸针机构做上下翻转运动。
进一步地,所述旋转机构还包括限位装置,所述限位装置由限位块及设置于限位块上的限位头组成,所述限位装置包括旋转上限位装置及旋转下限位装置,所述旋转上限位装置设置于所述吸针机构水平时上表面的上方,用于对吸针机构向下翻转的限位,所述旋转下限位装置设置于所述吸针机构水平时下表面的下方,用于对吸针机构向上翻转的限位。
进一步地,所述旋转上限位装置及旋转下限位装置分别在所述第一安装板的左右两侧设有两个。
进一步地,所述吸嘴的间距为针盒中相邻针孔位中心距的整数倍,所述吸嘴设置于所述吸针机构的左右两区,每区分别设有两排四列,共8个吸嘴。
进一步地,所述Z向运动机构包括第二安装板、齿轮、齿条及电机,所述齿条竖直安装于所述第一安装板的背面,所述第二安装板开设有容纳齿轮的开口,并在左右两侧分别设置有Z向导轨,所述第一安装板的背面设有与Z向导轨配合的Z向滑块,所述齿轮与所述所述齿条相互啮合,所述电机的输出轴与所述齿轮轴向连接,当电机驱动时,带动齿轮旋转,齿轮带动齿条上下运动,齿条带动第一安装板沿Z向导轨上下运动。
进一步地,所述Y向运动机构,包括直线气缸、气缸推块、Y向导轨及第三安装板,所述Y向导轨水平安装于所述第三安装板上,所述Y向导轨上滑动连接有固定块,所述固定块连接所述第二安装板,所述气缸推块固定安装于第三安装板上,并与直线气缸的输出端连接,当直线气缸驱动时,带动气缸推块,气缸推块带动第二安装板沿Y向导轨左右运动。
进一步地,所述Y向运动机构还包括Y向限位机构,所述Y向限位机构固定安装于所述第三安装板上,并位于第二安装板在Y向移动范围的两侧,每侧各设有两个Y向限位机构,用于对第二安装板在Y向的限位。
本发明还提供了一种加样针收集装置,其特征在于,包括上述的自动旋转吸针装置。
与现有技术相比,本发明的自动旋转吸针装置包括:吸针机构,吸针机构为板状,吸针机构的第一平面上设有排列分布的吸嘴,吸嘴用于吸取加样针,并对加样针进行定位;旋转机构,旋转机构与所述吸针机构连接,用于驱动所述吸针机构进行上下翻转;Z向运动机构,用于驱动吸针机构进行上下移动,Y向运动机构,用于驱动吸针机构进行左右移动。该自动旋转吸针装置能够对落下的加样针通过吸力进行抓取及定位,然后翻转,释放吸力,使加样针准确落入针盒中,该装置能够降低收集过程中的出错率,提高收集效率。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
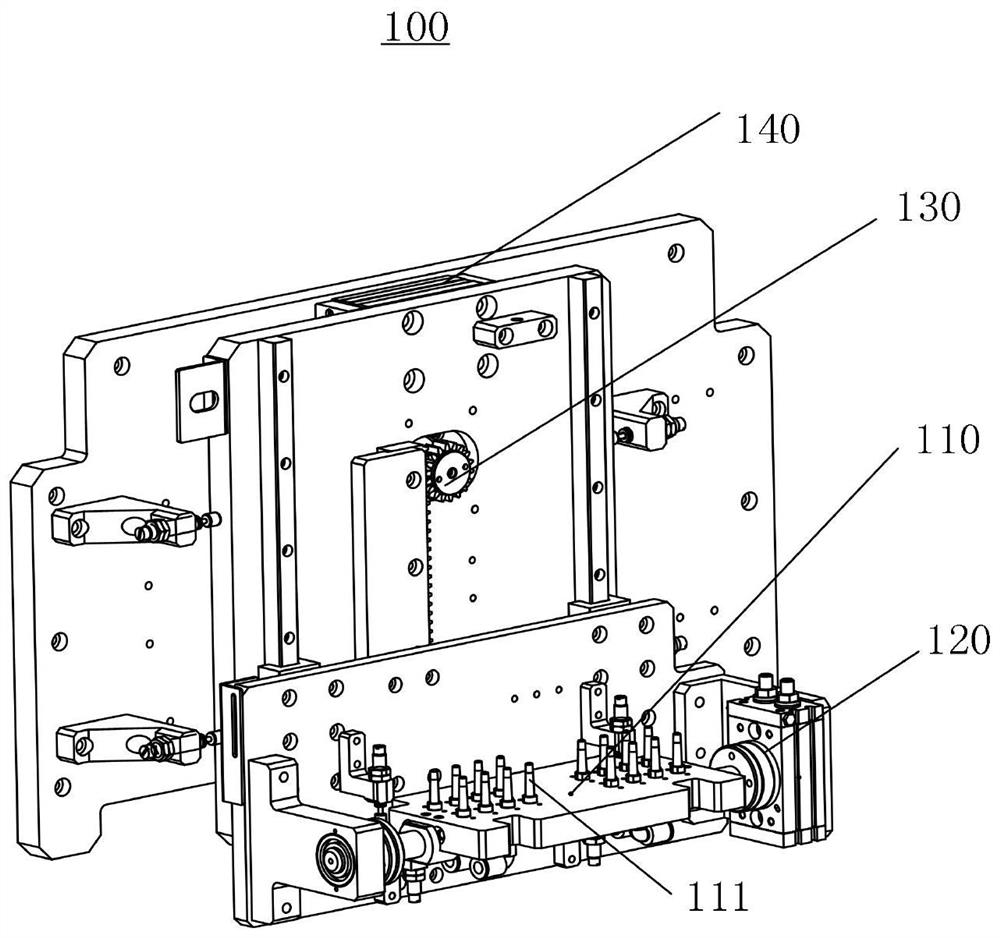
图1为一个实施例的自动旋转吸针装置的结构示意图;
图2为一个实施例的自动旋转吸针装置的爆炸结构示意图;
图3为一个实施例的自动旋转吸针装置的背面结构示意图;
图4为一个实施例的自动旋转吸针装置工作状态结构示意图;
图5为一个实施例的针盒的结构示意图。
其中,100-自动旋转吸针装置,110-吸针机构,111-吸嘴,112-负压转接头,120-旋转机构,121-摆动气缸,122-第一旋转支撑轴,123-第二旋转支撑轴,124-旋转轴承座,125-轴承,126-气缸座,127-第一安装板,130-Z向运动机构,131-第二安装板,132-齿轮,133-齿条,134-电机,135-Z向导轨,136-Z向滑块,137-Z向限位块,140-Y向运动机构,141-直线气缸,142-气缸推块,143-Y向导轨,144-第三安装板,145-固定块,146-Y向限位机构,150-旋转限位装置,151-限位块,152-限位头,153-旋转上限位装置,154-旋转下限位装置,160-针盒,161-针孔位,162-加样针。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明的实施方式作进一步地描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明,本发明实施例中所有方向性指示(如上、下、左、右、前、后等)仅用于解释在某一特定姿态下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应随之改变。
如图1所示,一种自动旋转吸针装置100,包括:吸针机构110,所述吸针机构为板状,所述吸针机构110的第一平面上设有排列分布的吸嘴111,所述吸嘴111用于吸取加样针162,并对所述加样针162进行定位;旋转机构120,所述旋转机构120与所述吸针机构110连接,用于驱动所述吸针机构110进行上下翻转;Z向运动机构130,用于驱动吸针机构110进行上下移动,Y向运动机构140,用于驱动吸针机构110进行左右移动。
该自动旋转吸针装置可用于加样针收集装置中,解决了现有技术中存在的加样针收集过程中出错率高,收集效率低的问题。该自动旋转吸针装置能够对落下的加样针通过吸力进行抓取及定位,然后翻转,释放吸力,使加样针准确落入针盒中,该装置能够降低收集过程中的出错率,提高收集效率。
具体地,如图2所示,吸针机构110的第二平面上设有与所述吸嘴111连通的负压转接头112,所述负压转接头112与负压装置连接,用于给所述吸嘴111提供吸取所述加样针162的吸力。当加样针下落至吸针机构110的第一平面上,加样针刚好套在吸嘴111外,开启负压装置,其提供的吸力使加样针稳固地被吸嘴111吸取,使得加样针能够被吸针机构110抓取并准确地定位。
具体地,如图2所示,旋转机构120包括摆动气缸121、第一旋转支撑轴122、第二旋转支撑轴123、旋转轴承座124、气缸座126及第一安装板127,所述第一安装板127竖直设置于所述吸针机构110的后侧,所述气缸座126安装于所述第一安装板127的一端,所述旋转轴承座124安装于所述第一安装板127的另一端,所述摆动气缸121固定安装于所述气缸座126上,所述第一旋转支撑轴122的一端与摆动气缸121的输出端连接,另一端与吸针机构110连接,所述第二旋转支撑轴123一端与吸针机构110连接,另一端通过轴承125与所述旋转轴承座124连接,当所述摆动气缸121运动时,旋转机构120能够带动所述吸针机构110做上下翻转运动。可以理解地,旋转机构120位于吸针机构110的水平中心轴线上,摆动气缸121的运动,带动第一旋转支撑轴122及第二旋转支撑轴123,从而带动吸针机构110做180°上下翻转运动。
进一步地,如图2所示,旋转机构120还包括限位装置,所述限位装置由限位块151及设置于限位块上的限位头152组成,所述限位装置包括旋转上限位装置153及旋转下限位装置154,所述旋转上限位装置153设置于所述吸针机构110水平时上表面的上方,用于对吸针机构110向下翻转的限位,所述旋转下限位装置154设置于所述吸针机构110水平时下表面的下方,用于对吸针机构向上翻转的限位。可以理解地,吸针机构110翻转到第一平面朝下时,旋转上限位装置153的限位头接触吸针机构的第二平面,防止吸针机构110过度旋转,使吸针机构110准确翻转180°;当吸针机构110翻转回第一平面朝上时,旋转下限位装置154的限位头接触吸针机构的第二平面,防止吸针机构110过度旋转,使吸针机构110准确翻转180°。
进一步地,如图2所示,旋转上限位装置153及旋转下限位装置154分别在所述第一安装板127的左右两侧设有两个。旋转上限位装置153及旋转下限位装置154水平对称设置,确保吸针机构110实现180°精准翻转,使接针和放针过程中,加样针位置准确,降低出错率。
具体地,如图1、图4及图5所示,所述吸嘴111的间距为针盒160中相邻针孔位161中心距的整数倍,所述吸嘴111设置于所述吸针机构110的左右两区,每区分别设有两排四列,共8个吸嘴。可以理解地,吸针机构110上吸嘴111的布置与针盒160的针孔位161相对应,可以实现吸针机构110翻转后加样针162准确落入针孔位161。由于针盒160的针孔位161相隔较密,如果加样针相隔较近,塑料材质加样针掉落时易出现相互干扰,会增加出错率,因此,吸嘴111的间距为针盒160中相邻针孔位161中心距的整数倍,可实现加样针的掉落时彼此间距扩大,避免出现相互干扰的情况,降低出错率。例如,吸嘴111的间距设为相邻针孔位161中心距的两倍,可实现加样针奇偶交替的落入针盒内,即加样针先放入针盒A、B行的1、3、5、7奇数列,自动旋转吸针装置100再做Y向运动,加样针再对准针盒A、B行的2、4、6、8偶数列,完成一个运动,针盒再由驱动电机(未示出)带动做X向运动至C、D行位置,进入下一个位置,如此往复,将针盒加满。
如图1-2所示,Z向运动机构130包括第二安装板131、齿轮132、齿条133及电机134,所述齿条133竖直安装于所述第一安装板127的背面,所述第二安装板131开设有容纳齿轮132的开口,并在左右两侧分别设置有Z向导轨135,所述第一安装板127的背面设有与Z向导轨135配合的Z向滑块136,所述齿轮132与所述所述齿条133相互啮合,所述电机134的输出轴与所述齿轮132轴向连接,当电机134驱动时,带动齿轮132旋转,齿轮132带动齿条133上下运动,齿条133带动第一安装板127沿Z向导轨135上下运动。Z向运动机构130实现了吸针机构平稳的上下移动,当吸针机构需要吸取加样针时,通过Z向运动机构130的电机134反转,齿条133带动吸针机构110向上移动至Z向限位块停止,利于平稳接针;当吸针机构需要释放加样针时,通过Z向运动机构130的电机134正转,齿条133带动吸针机构110向下移动至设定位置,利于平稳将加样针放入针盒中。
如图1-2所示,Y向运动机构140,包括直线气缸141、气缸推块142、Y向导轨143及第三安装板144,所述Y向导轨143水平安装于所述第三安装板144上,所述Y向导轨143上滑动连接有固定块145,所述固定块145连接所述第二安装板131,所述气缸推块142固定安装于第三安装板144上,并与直线气缸141的输出端连接,当直线气缸141驱动时,带动气缸推块142,气缸推块142带动第二安装板131沿Y向导轨左右运动。Y向运动机构实现驱动吸针机构左右移动,使加样针间隔交替落入针盒内,避免加样针之间相互干扰。
进一步地,如图2所示,Y向运动机构140还包括Y向限位机构146,所述Y向限位机构146固定安装于所述第三安装板144上,并位于第二安装板131在Y向移动范围的两侧,每侧各设有两个Y向限位机构146,用于对第二安装板131在Y向的限位。通过设置Y向限位机构,实现精确控制吸针机构的Y向运动,使吸嘴对准针盒的针孔位。
在另一实施例中,一种加样针收集装置,包括上述任一实施例的自动旋转吸针装置。该加样针收集装置能够提供加样针出模后的自动化收集操作,能够减少出错率,并提高收集效率,提高了加样针收集设备的智能化水平。
以上所述实施方式仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 一种自动旋转吸针装置
- 一种半自动负压吸针装针装置