一种智能移动机器人检测和处理霉斑的系统及方法
文献发布时间:2023-06-19 11:02:01
技术领域
本发明涉及机器人领域,具体涉及一种智能移动机器人检测和处理霉斑的系统及方法。
背景技术
霉斑不仅影响美观,而且一旦形成小霉斑却没有及时处理,很容易就会蔓延成大面积的霉斑,到时就很难处理。另外,霉斑中的孢子会随空气流动,家庭成员长期接触吸入,可引发呼吸道疾病和过敏症状,如支气管炎、扁桃体炎或哮喘病等,免疫力低的人还可能引起头疼、发烧、皮肤或黏膜发炎。现有的家庭智能移动机器人在功能上日益丰富,可以进行扫地、拖地甚至消毒,但是不能对家庭里的霉斑进行检测和处理,从而形成卫生死角,影响人体健康,因此提出本发明。
发明内容
为解决上述问题,本发明提供了一种智能移动机器人检测和处理霉斑的系统及方法,可以自动检测出家庭环境中的霉斑并进行初步处理,能够改善居住环境,降低霉菌对环境和人体的影响。本发明的具体技术方案如下:
一种智能移动机器人检测和处理霉斑的系统,所述系统包括智能移动机器人和智能终端,其中,所述智能移动机器人包括霉斑检测模块、霉斑处理模块和芯片;所述霉斑检测模块与芯片连接,用于采集环境图像并发送给芯片进行霉斑检测;所述霉斑处理模块与芯片连接,用于对霉斑进行处理;所述芯片用于处理霉斑检测模块和霉斑处理模块的数据以及控制霉斑检测模块和霉斑处理模块的工作;所述智能终端安装有可与机器人通信的软件,所述软件用于接收和保存机器人发送的通知以及发送指令给机器人。本发明所述的系统可以自动检测出家庭环境中各个角落的霉斑并进行初步处理,降低了霉菌对环境和人体的影响。
进一步地,所述霉斑检测模块包括摄像头、光传感器和辅助灯,其中,所述摄像头设置为朝向机器人前进的方向,用于采集环境图像;所述光传感器设置在机器人的上表面,用于检测环境光强度;所述辅助灯设置为与摄像头相同的朝向,用于照明。在环境光较弱时,使用辅助灯打光,可以提高摄像头拍摄的图像的质量,从而提高霉斑识别率。
进一步地,所述霉斑处理模块包括雾化器,所述雾化器设置在机器人的底部,包括本体和导管,所述本体可拆卸,用于盛放抑霉剂,所述导管的管口设置于机器人的前端底部并且朝向前方。采用雾化器雾化抑霉剂的方法相比于直接喷洒抑霉剂可以兼顾到对空气中霉菌孢子的处理。
一种智能移动机器人检测和处理霉斑的方法,所述方法具体为:机器人使用摄像头采集图像,然后对所述图像进行检测,若没有在图像中检测出霉斑,则机器人继续采集图像直到完成预设区域的检测,若在图像中检测出霉斑,则机器人发送通知到智能终端并使智能终端保存所述通知,在预设时间内,若接收到智能终端的指令,则机器人根据相关指令对霉斑进行处理,若没有接收到智能终端的指令,则机器人自动执行预先设定的设定指令。本发明所述的方法可以自动检测出家庭环境中的霉斑并按照用户的意愿进行处理,能够降低霉菌对环境和人体的影响,同时也有较好的用户体验。
进一步地,所述机器人采集图像时,如果检测到当前环境光强度低于预设阈值,则打开辅助灯。在环境光较弱时,使用辅助灯打光,可以提高摄像头拍摄的图像的质量,从而提高霉斑识别率。
进一步地,所述机器人使用摄像头采集图像后,用预先储存的霉斑检测模型对采集到的图像进行检测。
进一步地,所述通知包括霉斑的位置信息、图像信息、时间信息以及处理请求信息。发送详尽的通知供用户参考,以便用户做出合理的处理决策。
进一步地,若机器人接收的指令为处理指令,则机器人释放雾化器中的抑霉剂,预设时间后,继续采集图像直到完成预设区域的检测。释放抑霉剂可以在一定程度上抑制霉斑的蔓延以及霉菌孢子的毒性。
进一步地,若机器人接收的指令为忽略指令,则机器人跳过对霉斑的处理并继续采集图像,在重新接收到智能终端的处理指令后,机器人先读取位置信息,然后返回执行处理指令。若当前场景不适合使用抑霉剂,则暂时跳过处理步骤,并允许断点处理,提高了使用体验。
进一步地,所述设定指令是所述处理指令或忽略指令的其中一种。在用户繁忙时,自动执行预先设定的设定指令,降低了对用户的打扰,提高了使用体验。
附图说明
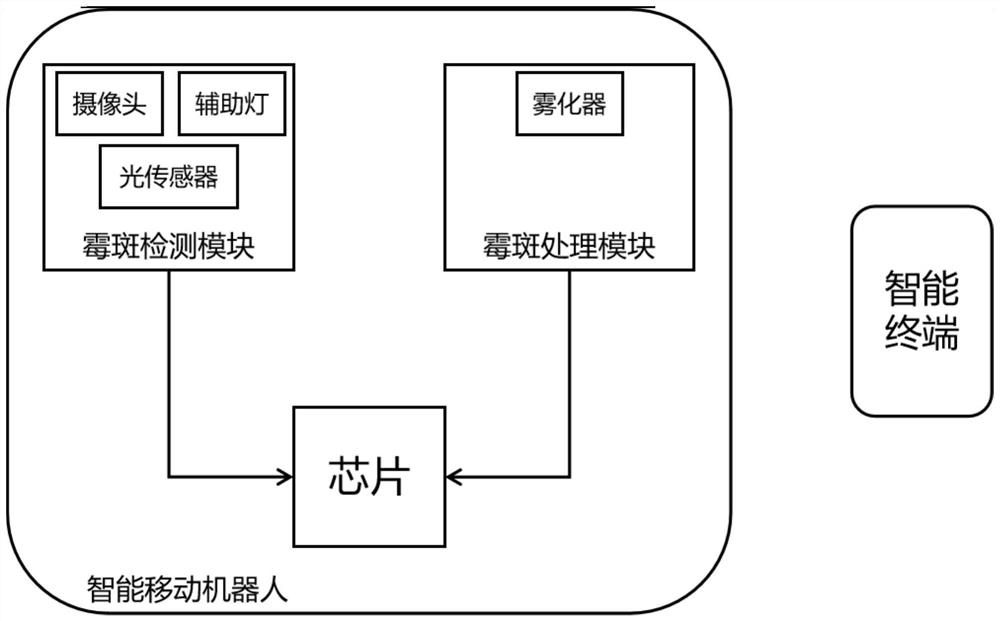
图1为本发明一种实施例所述智能移动机器人检测和处理霉斑的系统。
图2为本发明一种实施例所述智能移动机器人检测和处理霉斑的方法。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行详细描述。应当理解,下面所描述的具体实施例仅用于解释本发明,并不用于限定本发明。
在下面的描述中,给出具体细节以提供对实施例的透彻理解。然而,本领域的普通技术人员将理解,可以在没有这些具体细节的情况下实施实施例。例如,电路可以在框图中显示,以便不在不必要的细节中使实施例模糊。在其他情况下,为了不混淆实施例,可以不详细显示公知的电路、结构和技术。
如图1所示的一种智能移动机器人检测和处理霉斑的系统,所述系统包括智能移动机器人和智能终端。其中,所述智能移动机器人还包括霉斑检测模块、霉斑处理模块和芯片。所述霉斑检测模块与芯片连接,由摄像头、光传感器和辅助灯组成,用于采集环境图像并发送给芯片进行霉斑检测。所述摄像头设置为朝向机器人前进的方向,用于采集环境图像;所述光传感器设置在机器人的上表面,用于检测环境光强度;所述辅助灯设置为与摄像头相同的朝向,用于照明。在环境光较弱时,特别是机器人进入沙发底部等阴暗的角落采集图像时,使用辅助灯打光,可以提高摄像头拍摄的图像的质量,从而提高霉斑识别率。所述霉斑处理模块与芯片连接,包括一雾化器,用于对霉斑进行处理。所述雾化器设置在机器人的底部,包括本体和导管,所述本体可拆卸,用于盛放抑霉剂,所述导管的管口设置于机器人的前端底部并且朝向前方。霉斑会释放出孢子粉飘散在空气中,采用雾化器雾化抑霉剂的方法相比于直接喷洒抑霉剂可以兼顾到对空气中霉菌孢子的处理。
所述芯片用于处理霉斑检测模块和霉斑处理模块的数据以及控制霉斑检测模块和霉斑处理模块的工作。芯片上储存有预先训练好的霉斑检测模型,该模型的训练集包含了大量从网络上爬虫得到的家庭环境中的霉斑图像以及实际环境中采集的霉斑图像,然后使用卷积神经网络对该训练集进行训练,从而得到所述霉斑检测模型。霉斑检测模块采集到的图像将作为霉斑检测模型的输入,在经过运算后,会得到一个说明输入图像是否包含霉斑的输出结果。获得结果后,机器人会发送相关的通知给智能终端。所述通知包括霉斑的位置信息、图像信息、时间信息以及处理请求信息,所述智能终端安装有可与机器人通信的软件。智能终端在接收到通知后,会将其保存,然后告知用户机器人在家里检测到了霉斑并请求处理指令。机器人接收到处理指令后,会控制霉斑处理模块释放雾化器中的抑霉剂。
如图2所示的一种智能移动机器人检测和处理霉斑的方法,机器人使用摄像头采集图像,然后对所述图像进行检测,若没有在图像中检测出霉斑,则机器人继续采集图像直到完成预设区域的检测。在采集图像的过程中,如果机器人的光传感器感应到环境光的强度过低,则机器人会打开辅助灯进行打光照明,以提高图像的质量,有利于霉斑的识别。需要说明的是,机器人可以在执行其他工作任务的同时进行霉斑的检测,比如扫地、拖地或者消毒时。所述预设区域可以是机器人工作时建立的区域,也可以是智能终端上保存的历史区域。
若在图像中检测出霉斑,则机器人会发送霉斑的位置信息、图像信息、时间信息以及处理请求信息到智能终端上并保存。根据上述信息,用户可以发送处理指令或者忽略指令给机器人。如果机器人接收的指令为处理指令,则机器人释放雾化器中的抑霉剂,在一定时间后,机器人会继续采集图像直到完成预设区域的检测。如果机器人接收的指令为忽略指令,则机器人跳过对霉斑的处理并继续采集图像,在重新接收到处理指令后,机器人先读取位置信息,然后返回执行处理指令。允许断点处理,若当前场景不适合使用抑霉剂,则暂时跳过处理步骤,可以提高用户的使用体验。如果在设定的时间内,用户没有发送任何指令,则机器人自动执行预先设定的设定指令,所述设定指令是所述处理指令或忽略指令的其中一种,由用户事先在智能终端上设置并发送给机器人保存在芯片中。在用户繁忙时,自动执行预先设定的设定指令,降低了对用户的打扰,可以提高用户体验。
本领域普通技术人员可以理解:实现上述各方法实施例的全部或部分步骤可以通过程序指令相关的硬件来完成。这些程序可以存储于计算机可读取存储介质(比如ROM、RAM、磁碟或者光盘等各种可以存储程序代码的介质)中。该程序在执行时,执行包括上述各方法实施例的步骤。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
- 一种智能移动机器人检测和处理霉斑的系统及方法
- 一种用于智能叉车臂故障的检测系统、检测方法及其处理方法