拼装式筒体生产线及生产方法
文献发布时间:2023-06-19 11:13:06
技术领域
本发明涉及金属板材加工技术领域,尤其涉及一种拼装式筒体生产线及生产方法。
背景技术
目前,拼装式粉罐筒体拼块的加工流程为钢板先通过人工吊运板材至剪板机剪切两长边,达到图纸设定的宽度数值,然后再人工转运至钻床,用钻床钻所有孔,大孔需要等离子切割。孔加工完成后,人工转运至折弯机,通过天车、电磁铁将板材吸固吊起,放置在折弯机上折弯一边,然后人工旋转板材,折弯另一边。折弯完成后人工转运至三辊卷板机处,通过人工吊运将折弯后的钢板运到卷板机上,卷制成圆弧。最后焊接两短边角铁。
现有拼装式筒体拼块的加工工序繁杂,生产周期长,劳动强度大,生产效率低;整个生产过程需要人工多次转运和起吊,板材尺寸大且较重,吊运过程中的安全隐患大;人工操作比较多,人为因素出错的概率高,且无可追溯的历史数据;拼装式筒体原生产所使用的设备多,占地大,设备之间的距离远,转运时间长,管理不方便;拼装式筒体使用的钢板厚度较薄,常用的有厚度4mm,易变形,多次转运易导致钢板变形,影响产品尺寸。钢板钻孔前还需划钻孔线定位,再钻孔,效率低,孔加工经过两次定位,定位精度差。产品制作过程中,人为因素参与较多,产品质量和工人素质直接相关,产品一致性差。
发明内容
本发明实施例提供一种拼装式筒体生产线及生产方法,用以解决现有拼装式筒体拼块的加工生产效率较低、人为因素参与较多的问题。
本发明实施例提供一种拼装式筒体生产线,包括依次设置的数控冲床、长边折弯机、数控卷板机和短边折弯机,所述数控冲床的前侧设有上料位移机构,所述上料位移机构延伸至所述数控冲床的入口台面处,所述长边折弯机的侧边设有用于移动工件进行长边折弯操作的长边折弯位移机构,所述数控卷板机的入口端连接有卷板辊道台,所述数控冲床的出口台面以及所述卷板辊道台分别位于所述长边折弯机构的位移范围内,所述短边折弯机的侧边设有用于移动工件进行短边折弯操作的短边折弯位移机构。
根据本发明实施例提供的一种拼装式筒体生产线,所述数控冲床的前侧还设有定位检测台,所述定位检测台位于所述上料位移机构的位移范围内;所述定位检测台包括台架以及检测元件,所述检测元件固定于所述上料位移机构,所述检测元件用于对台架上的工件进行定位识别以及尺寸检测。
根据本发明实施例提供的一种拼装式筒体生产线,所述定位检测台的前侧设有交换工作台,所述交换工作台位于所述上料位移机构的位移范围内。
根据本发明实施例提供的一种拼装式筒体生产线,所述台架具有镂空部位,所述定位检测台的下方在镂空部位处设有打标机,所述打标机用于在工件上打印工件信息。
根据本发明实施例提供的一种拼装式筒体生产线,所述数控冲床的出口台面对应处设有下料位移机构,所述下料位移机构延伸至所述长边折弯位移机构的位移范围内;所述下料位移机构包括沿所述数控冲床的出口台面设置的下料位移组件以及连接于所述下料位移组件的夹爪组件。
根据本发明实施例提供的一种拼装式筒体生产线,所述长边折弯机处设有辊道定位台,所述辊道定位台用于对工件在长边折弯操作前进行定位识别。
根据本发明实施例提供的一种拼装式筒体生产线,所述数控卷板机的出口处设有辅助托架,所述辅助托架设于所述短边折弯位移机构的位移范围内。
根据本发明实施例提供的一种拼装式筒体生产线,所述上料位移机构包括上料位移组件,所述长边折弯位移机构包括长边折弯位移组件,所述短边折弯位移机构包括短边折弯位移组件;所述上料位移组件、所述长边折弯位移组件以及所述短边折弯位移组件上分别连接有用于吸附固定工件的吸附结构;所述吸附结构包括负压吸盘和/或电磁吸盘。
根据本发明实施例提供的一种拼装式筒体生产线,所述上料位移组件、所述长边折弯位移组件以及所述短边折弯位移组件上分别连接有工装架,所述工装架上设有所述吸附结构;且所述短边折弯位移组件上连接的工装架呈弧形。
本发明实施例还提供一种基于上述拼装式筒体生产线的拼装式筒体生产方法,包括:检测获得工件的实际尺寸,并确定工件的中心定位点;在工件的实际尺寸满足预设范围时,以工件的中心定位点为基准,依次对工件进行冲孔、长边折弯、卷板和短边折弯工序,并根据工件的实际尺寸与预设尺寸的偏差对长边折弯和短边折弯工序中的折弯量进行适应调节。
本发明实施例提供的一种拼装式筒体生产线及生产方法,采用自动化生产,通过位移机构取代人工转移工件,通过数控冲床取代人工划线钻孔,降低了工人的劳动强度,大幅缩减了工件的转运过程,同时由现有的单元化作业改为产线化作业,大幅缩短了生产节拍,有利于提高生产效率,且该生产线自动化程度高,人为因素比例大幅度降低,还有利于提高安全性以及提高产品的一致性。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
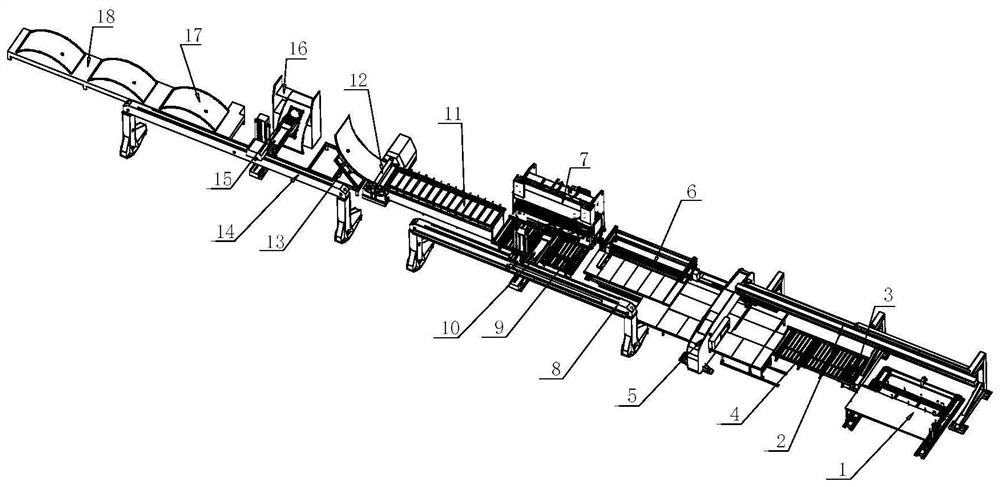
图1是本发明实施例提供的拼装式筒体生产线的整体示意图;
图2是本发明实施例提供的下料位移机构的结构示意图;
图3是本发明实施例提供的长边折弯机处的设置示意图;
图4是本发明实施例提供的短边折弯机处的设置示意图;
图5是本发明实施例提供的检测元件的设置示意图;
图6是本发明实施例提供的检测元件的结构示意图之一;
图7是本发明实施例提供的检测元件的结构示意图之二。
附图标记:
1:交换工作台;2:上料位移机构;3:打标机;4:定位检测台;5:数控冲床;6:下料位移机构;7:长边折弯机;8:长边折弯位移机构;9:辊道定位台;10:长边折弯工装架;11:卷板辊道台;12:数控卷板机;13:辅助托架;14:短边折弯位移机构;15:短边折弯工装架;16:短边折弯机;17:成品;18:末端输送机构;19:工件;
501:出口台面;601:下料支架;602:夹爪组件;603:下料导轨;604:夹爪支座;201:上料工装架;202:检测支座;203:检测元件;204:检测导轨;205:驱动件;206:同步带。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
下面结合图1至图7描述本发明实施例的拼装式筒体生产线及生产方法。
参考图1,本实施例提供一种拼装式筒体生产线,该拼装式筒体生产线包括依次设置的数控冲床5、长边折弯机7、数控卷板机12和短边折弯机16。数控冲床5先对工件19例如钢板进行自动冲孔,可取代人工划线钻孔,提高生产效率,且孔定位精度比人工更准确。然后通过长边折弯机7对工件19进行长边自动折弯。随后数控卷板机12完成工件19的卷制。接着,通过短边折弯机16完成工件19短边折弯,从而完成拼装式筒体的生产。通过短边折弯取代焊接角钢工序,可减少焊接量,降低劳动强度,有利于缩短生产节拍,提高生产效率。
数控冲床5的前侧设有上料位移机构2,上料位移机构2延伸至数控冲床5的入口台面处。数控冲床5的入口侧设有入口台面,工件19从入口台面上移动至冲床中进行冲孔。数控冲床5的出口处设有出口台面501,用于支撑放置冲孔后从冲床中移动出的工件19。上料位移机构2用于将工件19移动至数控冲床5的入口台面上。长边折弯机7的侧边设有用于移动工件进行长边折弯操作的长边折弯位移机构8,数控卷板机12的入口端连接有卷板辊道台11,数控冲床5的出口台面501以及卷板辊道台11分别位于长边折弯位移机构的位移范围内。长边折弯位移机构8用于将数控冲床5出口台面501上的工件19移动至长边折弯机7中进行长边折弯操作,并用于在工件19长边折弯操作之后将工件19放置在数控卷板机12的卷板辊道台11上。卷板辊道台11为输送辊结构,用于将工件19输送至数控卷板机12中进行卷板操作。短边折弯机16的侧边设有用于移动工件进行短边折弯操作的短边折弯位移机构14。短边折弯位移机构14用于将数控卷板机12出口处卷制后的工件19移动至短边折弯机16处进行短边折弯操作。
本实施例提供的一种拼装式筒体生产线,采用自动化生产,通过位移机构取代人工转移工件19,通过数控冲床5取代人工划线钻孔,降低了工人的劳动强度,大幅缩减了工件19的转运过程,同时由现有的单元化作业改为产线化作业,大幅缩短了生产节拍,有利于提高生产效率,且该生产线自动化程度高,人为因素比例大幅度降低,还有利于提高安全性以及提高产品的一致性。
在上述实施例的基础上,进一步地,参考图1,数控冲床5的前侧还设有定位检测台4,定位检测台4位于上料位移机构2的位移范围内。数控冲床5的前侧即沿生产流程位于数控冲床5之前的一侧。上料位移机构2先将工件19放置在定位检测台4上进行定位识别,找到工件19的中心定位点,以中心定位点为基准,准确判断工件19的位置,进而可将工件19按照预设位置送至数控冲床5中,有利于保证数控冲床5冲孔的精确度。定位检测台4包括台架以及检测元件203,检测元件203固定于上料位移机构2,检测元件203用于对台架上的工件19进行定位识别以及尺寸检测。台架用于支撑放置上料位移机构2移送来的工件19。检测元件203设置在上料位移机构2上,能够在上料位移机构2的带动下在其位移范围内移动,从而可对放置在台架上的工件19的各个部位进行检测,可获得工件19的位置信息以及全面的尺寸信息。
在上述实施例的基础上,进一步地,定位检测台4的前侧设有交换工作台1,交换工作台1位于上料位移机构2的位移范围内。交换工作台1用于存储放置工件19。待生产工件19初始放置在交换工作台1上。上料位移机构2先将工件19从交换工作台1上转移至定位检测台4上,经位置识别和尺寸检测后再将工件19转移至数控冲床5的入口台面上。
具体的,交换工作台1包括两个工作台面,两个工作台面均可用于支撑放置工件19,从而保证工件19的连续稳定上料。进一步地,交换工作台1的工作台面侧边设有限位件,可为限位档杆等,用于对工件19进行限位固定。
在上述实施例的基础上,进一步地,定位检测台4的台架具有镂空部位,定位检测台4的下方在镂空部位处设有打标机3。打标机3对应设于定位检测台4的镂空部位的下方。打标机3用于在工件19上打印工件信息。
进一步地,定位检测台4的台架为辊道结构,即台架上平行设有多个辊轴,辊轴与台架转动连接。相邻辊轴之间形成有镂空部位。打标机3可通过相邻辊轴之间的间隙向工件19上进行打印信息。其中打标机3在工件19上打印的工件信息可包括工件19的尺寸信息以及工件19的材料类型等。工件19的尺寸信息可为定位检测台4检测出的尺寸信息;工件19的材料类型可为操作人员输入的材料类型。
在上述实施例的基础上,进一步地,数控冲床5的出口台面501对应处设有下料位移机构6,下料位移机构6延伸至长边折弯位移机构8的位移范围内。设置下料位移机构6连接在数控冲床5的出口和长边折弯位移机构8之间,通过数控冲床5冲孔后的工件19先通过下料位移机构6沿出口台面501移动,在移动至长边折弯位移机构8的位移范围内时,再通过长边折弯位移机构8带动进行长边折弯操作。
设置下料位移机构6,可先将工件19拉出数控冲床5,使工件19暴露在数控冲床5的出口台面501上,可便于长边折弯位移机构8对工件19的吸附固定;同时可减小长边折弯位移机构8位移跨度。
具体的,参考图2,下料位移机构6包括沿数控冲床5的出口台面501设置的下料位移组件以及连接于下料位移组件的夹爪组件602。其中下料位移组件沿数控冲床5的工件19移动方向设于出口台面501的侧边。夹爪组件602用于夹取工件19的侧边。具体的,参考图2,本实施例中下料位移组件包括设于数控冲床5的出口台面501侧边的下料支架601,夹爪组件602连接于夹爪支座604,夹爪支座604与下料支架601沿数控冲床5的工件19移动方向滑动连接。下料支架601上可沿数控冲床5的工件19移动方向设置下料导轨603,夹爪支座604与下料导轨603滑动连接。夹爪组件602可包括并排设置的多个夹爪。
在数控冲床5对工件19冲孔完成时,可驱动夹爪组件602朝向数控冲床5的出口移动,通过夹爪组件602夹紧工件19的侧边,然后驱动夹爪组件602朝向背离数控冲床5的出口方向移动,使得在夹爪组件602的拉动下,工件19远离数控冲床5的出口移动。通过下料位移机构6将工件19拉出放置在出口台面501上,且位于长边折弯位移机构8的位移范围内,便于长边折弯位移机构8吸取工件19。
在上述实施例的基础上,进一步地,参考图3,长边折弯机7处设有辊道定位台9,辊道定位台9用于对工件19在长边折弯操作前进行定位识别。辊道定位台9设于长边折弯位移机构8的位移范围内。在工件19冲孔完成时,长边折弯位移机构8先将工件19移动至辊道定位台9上进行定位识别,然后根据工件19的定位将工件19按照预设位置移动至长边折弯机7中进行长边折弯操作。
参考图3,辊道定位台9为辊道台面结构,辊道定位台9上或者长边折弯位移机构8上同样设有检测元件203,用于对辊道定位台9上的工件19进行识别定位,获取工件19的实时定位。优选的,辊道定位台9沿数控冲床5设于数控冲床5的末端;长边折弯机7设于辊道定位台9的一侧,长边折弯位移机构8设于辊道定位台9的另一侧。
在上述实施例的基础上,进一步地,参考图1,数控卷板机的出口处设有辅助托架13,辅助托架13设于短边折弯位移机构14的位移范围内。长边折弯位移机构8将经长边折弯操作后的工件19送至卷板辊道台11上。卷板辊道台11为输送辊结构,用于将工件19输送至卷板机中进行卷制。其中,工件19长边的折弯部位位于卷板辊道台11和卷板机的两侧,不进入卷板机中进行卷制,同时两侧的折弯部位还可起到限位作用。
辅助托架13设在卷板机的出口处,用于支撑放置经卷板机卷制后的工件19。短边折弯位移机构14从辅助托架13上吸取工件19,然后带动工件19移动进行短边折弯。辅助托架13为边框结构,具有多处镂空部位,具体形式不限,以能够支撑卷制后的工件19且便于短边折弯位移机构14移走工件19为目的。
在上述实施例的基础上,进一步地,上料位移机构2包括上料位移组件,长边折弯位移机构8包括长边折弯位移组件,短边折弯位移机构14包括短边折弯位移组件;上料位移组件、长边折弯位移组件以及短边折弯位移组件上分别连接有用于吸附固定工件19的吸附结构。位移组件用于提供空间位移;吸附结构用于吸附固定工件19;位移组件可带动吸附结构进行空间移动。通过吸附结构吸取固定工件19,可避免对工件19表面造成损坏。
吸附结构包括负压吸盘和/或电磁吸盘。优选的,在各个位移组件上同时设有负压吸盘和电磁吸盘。可提高吸取工件19的可靠性,避免因突发情况例如气压不足时造成负压吸盘失效而导致工件19掉落,提高安全性。
在上述实施例的基础上,进一步地,上料位移组件、长边折弯位移组件以及短边折弯位移组件上分别连接有工装架,工装架上设有吸附结构。工装架上可阵列分布多个吸附结构,有利于增大对工件19的吸附面积,提高吸附稳定性和可靠性。且短边折弯位移组件上连接的工装架呈弧形。参考图4,因短边折弯工序中工件19经过卷制呈弧形,因此设置短边折弯工装架15呈弧形,可更好的适应工件19的弧度,有利于对工件19进行牢固稳定的吸附固定。
进一步地,上料位移机构2上的上料工装架201以及长边折弯位移机构8上的长边折弯工装架10可为平面结构。
进一步地,参考图1,短边折弯机16的后侧设有末端输送机构18,末端输送机构18的一端位于短边折弯位移机构14的位移范围内。短边折弯位移机构14带动卷制后的工件19进行短边折弯操作,然后将成品17放置在末端输送机构18上进行成品17输出。
进一步地,参考图5,定位检测台4的检测元件203可连接在上料位移机构2的上料工装架201上。上料位移机构2可带动上料工装架201进而带动检测元件203在上料位移机构2的位移范围内进行移动,可对工件19的不同部位进行检测,可获取工件19各个侧边的尺寸信息。进一步地,上料工装架201上可连接有检测支座202,检测元件203可滑动连接于检测支座202。可提高检测元件203的位移范围,便于对工件19进行全面的检测。
进一步地,参考图6和图7,检测支座202上沿检测支座202长度方向设有检测导轨204,检测元件203与检测导轨204滑动连接,且检测元件203连接有驱动结构,驱动结构用于驱动检测元件203沿检测导轨204移动。具体的,驱动结构可为驱动件205和同步带206结构。检测元件203连接于同步带206,驱动件205可为驱动电机用于带动同步带206移动,进而带动检测元件203移动。进一步地,检测元件203可为视觉相机和/或激光传感器;以能实现对工件19的定位以及尺寸检测为目的,具体不做限定。在对工件19进行定位识别时,可利用检测元件203获取工件19与定位检测台4的相对位置关系,然后根据定位检测台4的位置可获取工件19的定位。
进一步地,上料位移机构2、长边折弯位移机构8和短边折弯位移机构14可分别为桁架机械臂结构或者机器人结构,用于提供多个自由度的空间移动,具体设置可根据工序的实际需要来确定,不做限定。具体的,上料位移机构2用于实现工件19在交换工作台1、定位检测台4和数控冲床5的入口台面之间的转移,可为三维空间位移结构。长边折弯位移机构8在用于实现工件19转移的基础上,还用于将工件19送至长边折弯机7中进行长边折弯操作;且长边折弯操作涉及到工件19两侧长边的折弯,需要工件19的翻转。因此可设置长边折弯位移机构8为六轴空间位移机构,即能实现六个自由度的运动,以满足长边折弯工序的需求。具体的,长边折弯位移机构8的位移组件可包括三维直线位移组件以及连接在三维直线位移组件上的三维角度摆动组件。短边折弯位移机构14与长边折弯位移机构8类似,同样可为六轴空间位移机构。
在上述实施例的基础上,进一步地,本实施例提供一种基于上述任一实施例所述拼装式筒体生产线的拼装式筒体生产方法,该拼装式筒体生产方法包括:检测获得工件19的实际尺寸,并确定工件的中心定位点;在工件19的实际尺寸满足预设范围时,以工件的中心定位点为基准,依次对工件19进行冲孔、长边折弯、卷板和短边折弯工序,并根据工件19的实际尺寸与预设尺寸的偏差对长边折弯和短边折弯工序中的折弯量进行适应调节。
本实施例提供的拼装式筒体生产方法,在进行工序操作前先对工件19的实际尺寸进行检测,然后根据工件19的实际尺寸对后续工序通过适应性调整,可取代人工测量以及剪板操作,有利于减少劳动强度,提高生产效率,提高安全性以及提高生产精度和提高产品一致性。该拼装式筒体生产方法在对工件19的实际尺寸进行检测的同时还对工件19进行定位,获取工件19的位置信息,进而获得工件19的中心定位点,并以中心定位点为基准将工件转移至下一工序中并以中心定位点为基准进行后续的工序操作,具体可将工件19的中心定位点与后续工序操作中的中心点相对应进行后续操作,保证工件位置的精确。该拼装式筒体生产方法可采用定尺工件19原料,提高工件19原料尺寸的合格率,取消剪板操作。
根据工件19实际尺寸与预设尺寸的偏差对长边折弯和短边折弯工序中的折弯量进行适应调节具体包括:以工件19中心定位点为基准,在工件19的宽度大于或小于预设宽度时,相应的增大或减小长边折边尺寸。即在工件19的实际尺寸处于预设范围内时,再将工件19的实际尺寸与预设尺寸进行对比分析。在工件19的实际宽度宽于预设宽度时,可在长边折弯工序中适当的增大长边折弯量;在工件19的实际宽度小于预设宽度时,可在长边折弯工序中适当的减小长边折弯量,以保证长边折弯后工件19的宽度满足预设宽度。
以工件19中心定位点为基准,在工件19的长度大于或小于预设长度时,相应的增大或减小短边折边尺寸。在工件19的实际长度长于预设长度时,可在短边折弯工序中适当的增大短边折弯量;在工件19的实际长度小于预设长度时,可在短边折弯工序中适当的减小短边折弯量,以保证短边折弯后工件19的长度满足预设长度。
进一步地,在初始检测获得的工件19实际尺寸不在预设范围内时,不启动后续工序的进行,即此时判断工件19不满足生产要求,需要将该工件19从生产线上移除,避免生产不合格产品。此时还可进行报警提示,以提醒移除不满足要求的工件19。
进一步地,本实施例提供的一种拼装式筒体生产线还包括总控台,总控台与定位检测台4、各个位移机构、数控冲床5、长边折弯机7、卷板机以及短边折弯机16分别相连,用于实现生产线的整体智能控制。
在上述实施例的基础上,进一步地,参考图1,本实施例提供一种自动化拼装式粉罐筒体柔性生产线及生产方法。该生产线及生产方法具体为:用电动交换工作台1和桁架上料机械臂即上料位移机构2可实现原材料的自动上料和转运,取代人工,降低劳动强度,提高生产效率;定位检测台4可以直接测量原材料钢板的尺寸,测量精度可达到±0.1mm,取代人工测量,提高测量精度;数控转塔冲床结合冲床下料机械臂即下料位移机构6可实现自动冲孔,取代人工划线钻孔,提高生产效率,且孔定位精度比人工更准确;数控长边折弯机7结合7轴桁架折弯机械臂即长边折弯位移机构8(因设有辊道定位台9,因此为7轴)可实现钢板的自动折弯,取代人工折弯,减少吊运钢板的次数,提高了生产的安全性。
数控卷板机12和卷板机辅助托架13负责完成钢板的卷制,取代人工卷板工序,轻劳化,高效率。6轴桁架折边机械臂即短边折弯位移机构14结合数控短边折边机完成粉罐筒体短边折弯,取代焊接角钢工序,减少焊接量,降低劳动强度,缩短生产节拍。根据粉罐筒体下料尺寸对钢板做定尺规范,采购定尺钢板,取消剪板工序。
该生产线的具体生产流程为:操作人员通过行车或叉车将不同规格的板材放置在电动交换平台上,根据程序选择相应的原材料,即向生产线上输入确定原材料类型;冲床上料机械臂自动吸取板材,放置在定位检测台4上,检测出板材宽度长度与标准板材的误差,将检测数据传递到后续所有设备上。在检测完成后,打标机3工作,在板材指定区域打印原材料及工件19信息;打标完成后,冲床上料机械臂将板材送至数控转塔冲床上进行冲压,完成冲压后,冲床下料机械臂将板材转移至长边折弯起始位;7轴桁架折弯机械臂运动至折弯起始位,长边折弯工装架10吸取板材,将板材放至辊道定位台9处进行二次定位,定位完成后,长边折弯工装架10吸取板材在数控折弯机上折弯两长边。
在长边折弯完成后,折弯机械臂将板材输送到卷板机辊道台上,辊道台转动,将板材送进数控卷板中卷制成型,卷制完成后,卷板机辅助托架13托住圆弧型板材;6轴桁架折边机械臂通过圆弧折边工装架即短边折弯工装架15将卷板机辅助托架13上的圆弧板吸取,放置在数控折边机上折两短边,折边后最终产品完成,折边机械臂将成品17放置在末端辊道上,转至下一个焊接折弯边的工序。
该生产线及生产方法有利于减少劳动强度:拼装式粉罐筒体生产线采用自动化生产,用桁架和机器臂取代工人进行上下料、折弯、卷板,用冲床和上料机器臂取代工人划线、钻孔,降低了工人的劳动强度,提高安全系数。例如以前每班生产需要12个人以上,现在仅需要3-4人进行原料供应及成品17转运。
提高生产效率:拼装式粉罐筒体的生产过程全部采用机械自动化作业,大幅缩减了产品的转运过程,冲孔取代钻孔,提高了生产效率。根据加工工艺流程,将主机设备整合成一条生产线,同时由原先的单元化作业改为产线化作业,缩短转运距离,结合桁架机械臂,提高作业节拍,大幅缩短了生产节拍,提高生产效率。例如以前每班生产30件,现在每班生产80件,生产效率提升267%。
提高安全性:板材的转运和上下料都由桁架机器臂完成作业,避免了人工作业过程中发生的安全事故。提高精度:原先钢板尺寸由工人测量定位,人为因数干扰大,尺寸精度控制偏低,现通过定位检测台4实现自动测量,定位精度可控制在±0.1mm内,尺寸精度大幅提高。原加工孔需经过划线、钻孔两道工序,二次定位会导致孔位偏差大,现采用数控冲床5一次加工,孔位可控制在±0.1mm内,定位精度高。
整合现场,方便管理:拼装式粉罐筒体生产由原来的4台独立设备,变为现在的自动化生产线,设备间的距离缩短,整体占地相比原先缩减一半以上,管理更高便捷。拼装式粉罐筒体生产线全部采用桁架机械臂转运,吸盘吸固在钢板上,不会损伤钢板,产品的质量能得以保证。生产成本大幅降低:以前钢板回厂后需要剪板,钻孔,最后还需要焊接角铁;现在采用定尺钢板,没有剩余尾料,大幅提高材料利用率;通过原材料进行定尺限制,可取消剪板工序。冲孔一次成形取代钻孔,大幅减少工时,降低人工成本。设计优化:短边直接折边两短边,焊接四个小角,取焊接角铁,减少焊接工作量。粉罐筒体的制作过程每道工序都有数据记录,系统可存储并追溯加工数据,能时刻保证产品的质量。拼装式粉罐筒体生产线自动化程度高,人为因素比例大幅降低,产品的一致性得到大幅提升。
可以用机器人替代桁架机械臂,实现工件19的转运。整套自动化拼装式粉罐筒体柔性生产线能够实现拼装式粉罐筒体拼块的自动化生产,该加工工艺技术领先;整套自动化拼装式粉罐筒体柔性生产线能够通过定位台自动完成钢板尺寸的测量和定位,精度在±0.1mm内,是后续板材加工定位的基础;卷板单元(数控卷板机12,卷板机辊道台,卷板机辅助托架13)能够自动完成板材的卷板动作,且卷板单元能与桁架机械臂衔接,完成物料转运。7轴桁架机械臂能完成板材的自动上下料和转运,与数控折弯机结合,无需二次抓取即可实现板材任意角度的折弯动作。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 拼装式筒体生产线及生产方法
- 一种组合拼装式回转窑筒体