一种基于GNSS和RFID的变电站巡检机器人导航定位方法
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及机器人的技术领域,尤其涉及一种基于GNSS和RFID的变电站巡检机器人导航定位方法。
背景技术
随着电网的不断发展,电网中的各种电力设备也在不断增加,而各种电力设备也需要在指定的时间内进行诊断检查,以保证设备的安全运行。巡检机器人是一种可在变电站复杂环境下工作,具有行动便捷、工作高效、结构简单、可控性强、安全性好等优势。但目前巡检机器人的技术并没有达到令人满意的程度,其中最大的难点就是机器人的导航定位技术。
在巡检机器人行驶过程中,由于作业内容、信号收发、紧急避障等原因需要实时更新定位信息为路径矫正和优化提供准确数据。在室外信号差、干扰信号强的特殊环境,信号易发生反射、衍射等问题。此外,GPS定位数据包含了系统误差、时钟差、延误差难以避免的误差,对巡检机器人定位精度的提高有很大的限制。
发明内容
针对背景技术中的不足,为此,本发明提出了一种基于GNSS和RFID的变电站巡检机器人导航定位方法,具体方案如下:
一种基于GNSS和RFID的变电站巡检机器人导航定位方法,包括以下步骤:
S1、规划与布设变电站巡检硬件设备、采集变电站地理信息和设备信息并编码、制作变电站巡检导航文件;
S2、启动巡检作业,根据巡检导航文件下达导航路径和方案;
S3、巡检机器人行走过程中,位于巡检机器人内的GNSS移动站收发信号,得到巡检机器人的实时位置信息;
S4、巡检机器人行走时,路标匹配、RFID实时读写定位、实现GNSS与RFID进行变电站巡检机器人的协同定位与导航,巡检机器人平台摄像单元实时获取巡检信息,通过GNSS与RFID接收到的地理位置信息和摄像头采集的图像信息不断发送到远程监控平台。
具体地说,步骤S1中规划与布设变电站巡检硬件设备的具体步骤为:依据变电站站内建筑位置、进出线方向和位置、进出站的道路位置、电力设备位置和线路走向、站内道路位置和转弯半径,规划布设GNSS基准站、GNSS移动站和RFID读写设备。
具体地说,步骤S1中采集变电站地理信息和设备信息并编码的具体步骤为:采用GNSS定位模块和内置地图对变电站建筑物、内部道路、电力设备和巡检涉及的经纬度位置信息进行采集,并存储采集的位置信息;同时,对变电站布设在主要内部道路沿线和主要设备位置点的RFID卷标进行唯一编号。
具体地说,步骤S1中制作变电站巡检导航文件具体为:将采集的要素和标志性地点制作成导航文件,并将导航文件与采集的要素和标志性地点的经纬度信息进行一一匹配,并导入到监控中心。
具体地说,步骤S2具体为:启动巡检机器人作业按钮,监控中心首先发出该次作业指令,并将该作业指令传输至主控制器,经过主控制器处理后通过通信模块将巡检的作业起点、最佳行进路线、关键作业地点和作业终点信息,以及相对应的导航路径和方案传递给巡检机器人平台,巡检机器人接收后可按照该路径和方案进行自主行走。
具体地说,步骤S3具体为:GNSS基准站通过增强卫星定位信号获取自身的坐标,同时获取普通卫星定位信号,并将自身的坐标与普通卫星定位信号之间的差分数据通过通信模块实时传输给搭载在巡检机器人平台上的GNSS移动站,GNSS移动站接收自身的普通卫星定位信号,并利用所接收到的差分数据对自身的普通卫星定位信号进行修正,然后根据修正后的普通卫星定位信号得到自身的位置信息。
具体地说,步骤S3具体包括如下步骤:
S301、布设在变电站内的GNSS基准站通过增强卫星定位信号获取自身的坐标,同时获取普通卫星定位信号,并计算所述坐标与普通卫星定位信号之间的差分数据;
S302、GNSS基准站将获取差分数据传输给搭载在巡检机器人平台上的GNSS移动站;
S303、搭载在巡检机器人平台上的GNSS移动站,一方面接收自身的普通卫星定位信号,另一方面利用所接收到的差分数据对自身的普通卫星定位信号进行修正;
S304、巡检机器人平台上的GNSS移动站根据修正后的普通卫星定位信号得到自身的位置信息。
具体地说,步骤S4中路标匹配和RFID实时读写定位的步骤具体为:
S401:根据巡检机器人规划的行走路径,将路径上各点位对应的功能码写入到RFID射频卡上;
S402:将S401步骤所述的功能码及其对应的数字ID编码发送到监控单元中,监控单元控制模块把功能码按照对应的任务号存储在事先分好的EEPROM的空间,并用地址变量进行记录和存储;
S403:将EEPROM任务空间中所述任务号的任务列表复制到SRAM临时任务缓冲区中,巡检机器人运行时,定时查询RFID卡的路标ID,一旦获得路标ID,就将巡回机器人和任务号联合;
S404:在任务缓冲区中按照设定的匹配算法寻找到和与其相匹配的唯一功能码,最后根据功能码完成设定的巡检任务。
具体地说,步骤S4中实现GNSS与RFID进行变电站巡检机器人的协同定位与导航的具体步骤为:GNSS移动站不断接收普通卫星定位信号和GNSS基准站差分数据,并将二者结合修正得到自身的高精度位置信息,执行巡检作业位置信息及相应的导航方案;搭载在巡检机器人平台的RFID读写器读出该RFID标签里面的信息,从而获知该标签里的地理位置信息及相应的导航方案,同时,通过RFID标签里的准确位置信息实时校准GNSS的定位信息。
具体地说,所述GNSS基准站包括接收单元、差分单元和传输单元;所述接收单元包括第一GNSS接收机模块和第二GNSS接收机模块,第一GNSS接收机模块和第二GNSS接收机模块均可以接收两个或者两个以上的GNSS系统信号;所述差分单元,用于计算所述基准站单元自身的高精度坐标与普通卫星定位信号之间的差分数据;所述传输单元,用于将所述差分子单元输出的差分数据实时传输给所述GNSS移动站。
本发明的有益效果在于:基于本申请的方法可以大大的提高巡检机器人的定位精度。
附图说明
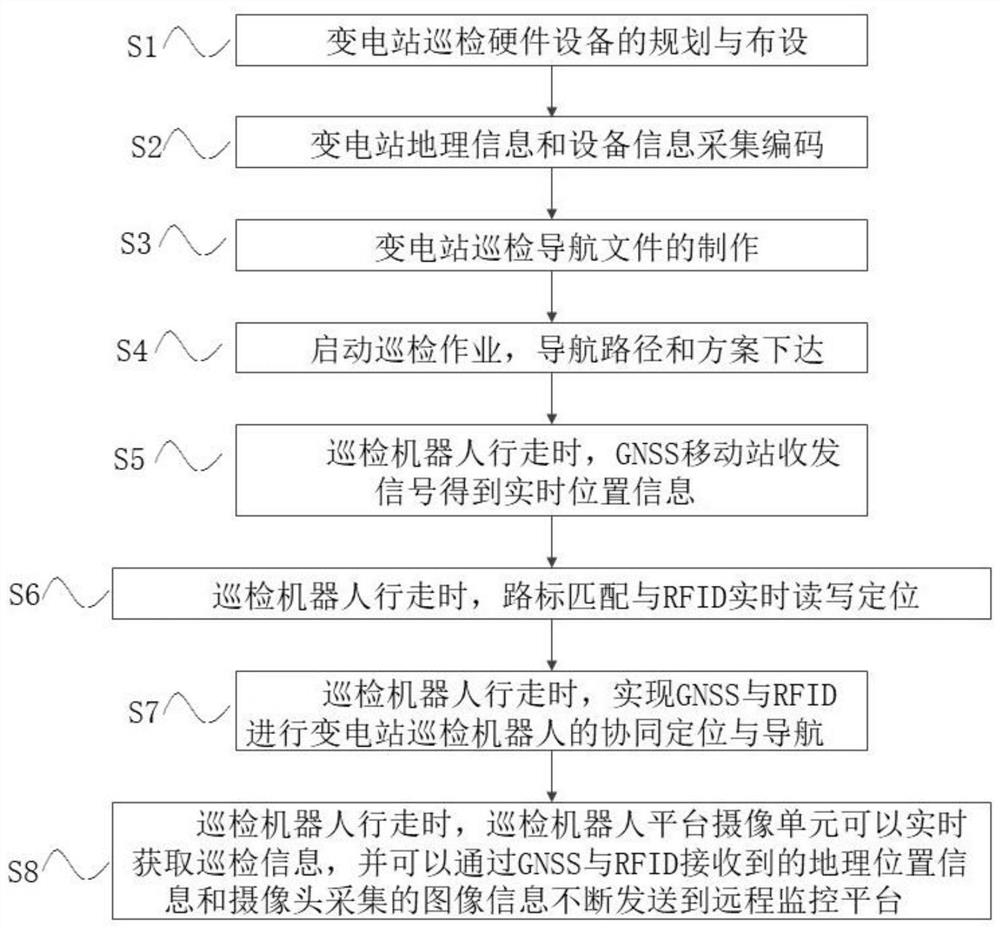
图1为本发明巡检机器人导航定位工作流程图。
图2为本发明一个实施例的GNSS基准站的结构框架图。
图3为本发明一个实施例的GNSS移动站收发信号工作流程图。
图4为本发明一个实施例的RFID实时读写定位工作流程图。
图中:
1、GNSS全球导航卫星系统;2、接收天线;3、信号功分器;4、地基增强信号;51、第一GNSS接收机模块;52、第二GNSS接收机模块;6、差分单元;7、传输单元;8、GNSS移动站
具体实施方式
如图1所示,一种基于GNSS和RFID的变电站巡检机器人导航定位方法,包括以下步骤:
S1、规划与布设变电站巡检硬件设备、采集变电站地理信息和设备信息并编码、制作变电站巡检导航文件;
S2、启动巡检作业,根据巡检导航文件下达导航路径和方案;
S3、巡检机器人行走过程中,位于巡检机器人内的GNSS移动站8收发信号,得到巡检机器人的实时位置信息;
S4、巡检机器人行走时,路标匹配、RFID实时读写定位、实现GNSS与RFID进行变电站巡检机器人的协同定位与导航,巡检机器人平台摄像单元实时获取巡检信息,通过GNSS与RFID接收到的地理位置信息和摄像头采集的图像信息不断发送到远程监控平台。
如图1-2所示,步骤S1中规划与布设变电站巡检硬件设备的具体步骤为:依据变电站站内建筑位置、进出线方向和位置、进出站的道路位置、电力设备位置和线路走向、站内道路位置和转弯半径,规划布设GNSS基准站、GNSS移动站8和RFID读写设备。
所述GNSS基准站包括接收单元、差分单元6和传输单元7:
所述接收单元,包括第一GNSS接收机模块51和第二GNSS接收机模块52,第一GNSS接收机模块51和第二GNSS接收机模块52均可以接收两个或者两个以上的GNSS系统信号。其中,第一GNSS接收机模块51具备地基增强服务功能,可以通过接收地基增强信号来获得自身的高精度绝对坐标,而第二GNSS接收机模块52采用不具有地基增强服务功能的普通GNSS接收机。优化的,所述接收单元输入端还包括接收部,所述接收部包括依次设置的接收天线2、信号功分器3、地基增强信号4,所述接收天线通过接收GNSS全球导航卫星系统1发出的信号。为保证接收单元获取高精度位置信息,第一GNSS接收机模块51和第二GNSS接收机模块52采用同一GNSS天线来接收卫星信号,GNSS天线所接的信号通过信号功分器3,分两路分别传输给两台GNSS接收机模块。
所述差分单元6,用于计算所述基准站单元自身的高精度坐标与普通卫星定位信号之间的差分数据。优化的,为保证输出精确的差分数据结果,预设差分定位结果满足条件,仅当结果指示出满足预设条件时,GNSS定位设备输出该差分定位结果。
所述传输单元7,用于将所述差分子单元输出的差分数据实时传输给所述GNSS移动站8。
所述GNSS基准站一般布设在卫星接收信号较好的地方。具体地说,所述GNSS固定基准站布设在站内建筑最高处。所述GNSS移动站8搭载在巡检机器人平台上。具体的说,所述GNSS移动站8搭载在巡检机器人平台底座上方控制箱。
当巡检机器人进入到RFID标签设定的工作范围内,安装在巡检机器人上的RFID读写器就会读出该RFID标签里面的信息,从而获知该标签里的地理位置信息及相应的导航方案。所述RFID读写设备包括RFID阅读器和RFID卷标。所述RFID阅读器搭载在在巡检机器人平台上。在该方案中,所述RFID阅读器搭载在巡检机器人平台底座上方控制箱。所述RFID卷标布设在在变电站主要内部道路沿线和主要电力设备位置处。
步骤S1中采集变电站地理信息和设备信息并编码的具体步骤为:采用GNSS定位模块和内置地图对变电站建筑物、内部道路、电力设备和巡检涉及的经纬度位置信息进行采集,并存储采集的位置信息;同时,对变电站布设在主要内部道路沿线和主要设备位置点的RFID卷标进行唯一编号,即在RFID卡扇区写入数字ID编码来实现对RFID卡的唯一编码。所述内置地图的存储位置与采集的信息存储位置一致。
步骤S1中制作变电站巡检导航文件具体为:将采集的要素和标志性地点制作成导航文件,并将导航文件与采集的要素和标志性地点的经纬度信息进行一一匹配,并导入到监控中心。
步骤S2具体为:启动巡检机器人作业按钮,监控中心首先发出该次作业指令,并将该作业指令传输至主控制器,经过主控制器处理后通过通信模块将巡检的作业起点、最佳行进路线、关键作业地点和作业终点信息,以及相对应的导航路径和方案传递给巡检机器人平台,巡检机器人接收后可按照该路径和方案进行自主行走,且在必要时监控中心可实时远程控制和指导巡检机器人的作业。
步骤S3具体为:GNSS基准站通过增强卫星定位信号获取自身的高精度坐标,同时获取普通卫星定位信号,并将自身的高精度坐标与普通卫星定位信号之间的差分数据通过通信模块实时传输给搭载在巡检机器人平台上的GNSS移动站8,GNSS移动站8接收自身的普通卫星定位信号,并利用所接收到的差分数据对自身的普通卫星定位信号进行修正,然后根据修正后的普通卫星定位信号得到自身的高精度位置信息。
更详细的说,如图3所示,步骤S3具体包括如下步骤:
S301、布设在变电站内的GNSS基准站通过增强卫星定位信号获取自身的坐标,同时获取普通卫星定位信号,并计算所述坐标与普通卫星定位信号之间的差分数据;
S302、GNSS基准站将获取差分数据传输给搭载在巡检机器人平台上的GNSS移动站8;
S303、搭载在巡检机器人平台上的GNSS移动站8,一方面接收自身的普通卫星定位信号,另一方面利用所接收到的差分数据对自身的普通卫星定位信号进行修正;
S304、巡检机器人平台上的GNSS移动站8根据修正后的普通卫星定位信号得到自身的高精度位置信息。
如图4所示,步骤S4中路标匹配和RFID实时读写定位的步骤具体为:
S401:根据巡检机器人规划的行走路径,将路径上各点位对应的功能码写入到RFID射频卡上;
S402:将S401步骤所述的功能码及其对应的数字ID编码发送到监控单元中,监控单元控制模块把功能码按照对应的任务号存储在事先分好的EEPROM的空间,并用地址变量进行记录和存储;
S403:将EEPROM任务空间中所述任务号的任务列表复制到SRAM临时任务缓冲区中,巡检机器人运行时,定时查询RFID卡的路标ID,一旦获得路标ID,就将巡回机器人和任务号联合;
S404:在任务缓冲区中按照设定的匹配算法寻找到和与其相匹配的唯一功能码,最后根据功能码完成设定的巡检任务。
实现GNSS与RFID进行变电站巡检机器人的协同定位与导航具体步骤为:巡检机器人行走时,GNSS移动站8不断接收普通卫星定位信号和GNSS基准站差分数据,并将二者结合修正得到自身的高精度位置信息,执行巡检作业位置信息及相应的导航方案。搭载在巡检机器人平台的RFID读写器就会读出该RFID标签里面的信息,从而获知该标签里的地理位置信息及相应的导航方案。同时,通过RFID标签里的准确位置信息可以实时校准GNSS的定位信息,大幅度提高巡检机器人的作业精度。具体地说,实现GNSS与RFID进行变电站巡检机器人的协同定位与导航,在GNSS信号受误差影响和非视线情景时,采用RFID定位代替GNSS定位;在GNSS信号良好时,GNSS定位结果作为RFID的全局初始位姿,使RFID在室外具有很好的全局定位能力。
巡检机器人平台摄像单元实时获取巡检信息,并通过GNSS与RFID接收到的地理位置信息和摄像头采集的图像信息不断发送到远程监控平台,其中的远程监控平台的工作人员可以实时的进行监控并指导巡检机器人前行,最终完成巡检机器人的定位与导航。监控平台可通过巡检机器人摄像单元采集的图像信息实时获取巡检行径路面的信息,如遇紧急情况,可控制巡检机器人在紧急状态下的工作,同时将相关信息发送给作业工人从而采取相应的措施,最终完成巡检机器人的安全巡检作业。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种基于GNSS和RFID的变电站巡检机器人导航定位方法
- 一种基于粒子滤波的变电站巡检机器人导航定位方法