微流控芯片及流速控制方法
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及微流控芯片流道设计制造领域,具体涉及一种微流控芯片及流速控制方法。
背景技术
微流体具有样本体积小、分析速度快、成本低及便携性强等特点,在化学合成、生物医学和信息技术等领域有着广泛的应用。在微流控芯片的实际使用过程中,经常面临需要对流道内液体流速进行控制的需求,在微流控芯片病毒检测时,待测样品液流速过快或者过慢,都会影响混合的均匀度,从而影响核酸扩增效率和检测的准确性,所以控制流速十分重要。在现有技术中,微流控芯片内的流体一般通过泵、电场或者磁场等外部设备来对流体进行驱动和速度控制,导致增加了成本且结构复杂。
发明内容
本发明的主要目的在于提出一种微流控芯片及流速控制方法,旨在解决无需复杂的外部辅助设备,通过简单结构实现多种病毒的有效精准检测的技术问题。
为实现上述目的,本发明提出一种微流控芯片及流速控制方法,所述微流控芯片包括:
基板;
设置在所述基板上的依次连接的进样池、水平流道以及反应池,所述水平流道的入口连接所述进样池,所述水平流道的出口连接所述反应池,其中,所述水平流道上设有多条复合微流道,所述复合微流道设有V型倾角结构;
所述进样池,用于获取待测样品液;
所述水平流道,用于根据所述复合微流道的倾角控制所述待测样品液流入所述反应池;
所述反应池,用于对所述待测样品液与检测试剂进行检测。
可选的,所述水平流道沿深度逐渐增大的方向带有预设层复合V型倾角结构的多条复合微流道,每层复合微流道设置不同的流道V型角度、倾角以及深度。
可选的,所述复合微流道的V型夹角逐渐减小,深度逐渐加深,将芯片键合封装以形成负压环境,其中,所述深度范围为300~400um。
可选的,所述复合微流道的第一层水平流道V型角度范围为90~120°,第二层倾角流道V型角度范围为60~90°,倾角为0~1°,第三层倾角流道V型角度范围为30~60°,倾角为1~2°。
可选的,所述基板采用的材料包括石英玻璃或者亚克力。
可选的,所述微流控芯片包括基板,设置在所述基板上的依次连接的进样池、水平流道以及反应池,所述水平流道的入口连接所述进样池,所述水平流道的出口连接所述反应池,其中,所述水平流道上设有多条复合微流道,所述复合微流道设有V型倾角结构,所述流速控制方法,包括:
确定所述复合微流道的层数;
在所述层数大于一层时,则获取当前负压、当前层复合微流道的当前层深度、当前层流道V型角度以及当前层倾角;
根据所述当前负压、所述当前层深度以及所述当前层倾角确定待测样品液在当前层复合微流道的速度;
根据所述当前层复合微流道的速度确定复合微流道的速度集合;
根据所述复合微流道的速度集合控制所述待测样品液从所述进样池流入所述反应池。
可选的,所述根据所述当前负压、所述当前层深度以及所述当前层倾角确定当前层复合微流道的速度,包括:
确定待测样品液中微流体的密度、微流体与流道的接触角、微流体的表面张力、微流体的粘度以及当前层V型截面等效圆的半径;
根据所述当前负压、所述当前层深度、所述微流体与流道的接触角、所述当前层倾角、所述微流体的表面张力、所述微流体的粘度、所述当前层V型截面等效圆的半径以及所述微流体的密度确定前层复合微流道的速度。
可选的,所述根据所述当前负压、所述当前层深度、所述微流体与流道的接触角、所述当前层倾角、所述微流体的表面张力、所述微流体的粘度、所述当前层V型截面等效圆的半径以及所述微流体的密度确定前层复合微流道的速度计算公式为:
其中,v
可选的,确定当前层V型截面等效圆的半径,包括:
根据所述当前层深度和所述前层流道V型角度计算当前层V型截面等效圆的半径。
可选的,所述根据所述当前层深度和所述前层流道V型角度计算当前层V型截面等效圆的半径计算公式为:
其中,r
本发明提出一种微流控芯片及流速控制方法,所述微流控芯片包括:基板;设置在所述基板上的依次连接的进样池、水平流道以及反应池,所述水平流道的入口连接所述进样池,所述水平流道的出口连接所述反应池,其中,所述水平流道上设有多条复合微流道,所述复合微流道设有V型倾角结构;所述进样池,用于获取待测样品液;所述水平流道,用于根据所述复合微流道的倾角控制所述待测样品液流入所述反应池;所述反应池,用于对所述待测样品液与检测试剂进行检测。本发明通过当前负压环境、当前层深度以及当前层倾角确定待测样品液在当前层复合微流道的速度,控制每层复合微流道中待测样品液流入反应池的速度,从而无需复杂的外部辅助设备,通过简单的V型倾角结构进行速度微控,同时能够高效精准的检测出多种病毒。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
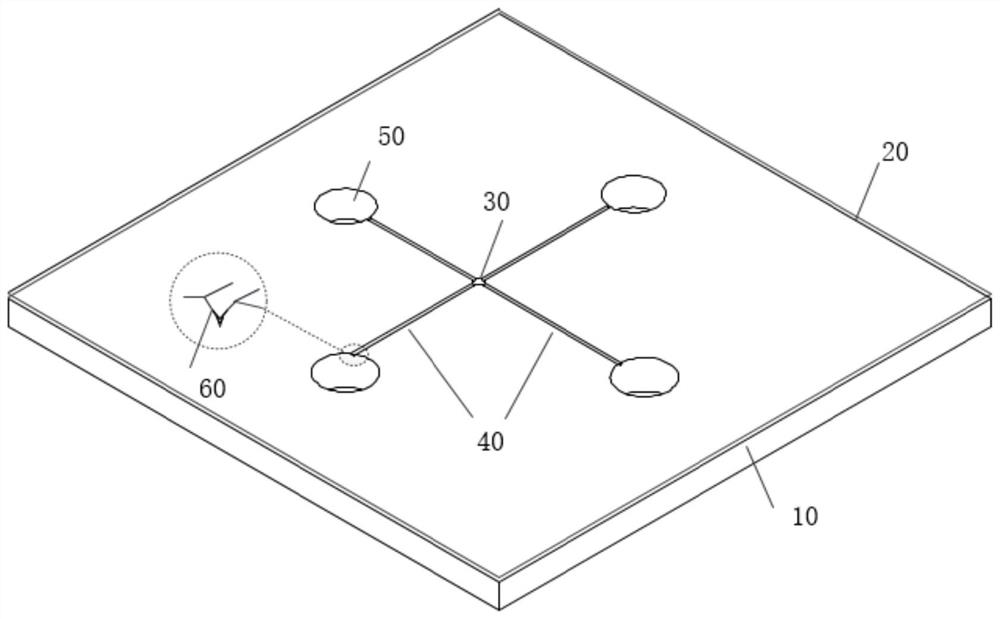
图1为本发明微流控芯片及流速控制方法一实施例的结构示意图;
图2为本发明微流控芯片及流速控制方法一实施例的复合微流道的结构框图的俯视图;
图3为本发明微流控芯片及流速控制方法一实施例的复合微流道的结构框图的侧视图;
图4为本发明微流控芯片及流速控制方法第一实施例的流程示意图。
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后……)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
另外,在本发明中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
本发明提出一种微流控芯片及流速控制方法。
参照图1,在本发明实施例中,所述微流控芯片10包括:基板20;设置在所述基板20上的依次连接的进样池30、水平流道40以及反应池40,所述水平流道40的入口连接所述进样池30,所述水平流道40的出口连接所述反应池50,其中,所述水平流道40上设有多条复合微流道60,所述复合微流道60设有V型倾角结构;所述进样池30,用于获取待测样品液;所述水平流道40,用于根据所述复合微流道60的倾角控制所述待测样品液流入所述反应池50;所述反应池50,用于对所述待测样品液与检测试剂进行检测。
需要说明的是,微流控分析芯片10是微流控技术实现的主要平台,可以把生物、化学、医学分析过程的样品制备、反应、分离、检测等基本操作单元集成到一块微米尺度的芯片上,对微观尺度下的微流体进行操作和控制,自动完成分析全过程。微流控芯片包括基板,基板上设置依次连接的进样池30、水平流道40以及反应池40,而水平流道得入口连接进样池30,水平流道40的出口连接反应池50,再具体实施过程中可以设置一个进样池30与相同多个数量的水平流道40和反应池50,实现待测样品液与多种检测试剂混合,本实施例对此不作限制。
可以理解的是,水平流道40上可以设有多条复合微流道60,本实施例对此不作限制,其中,复合微流道60设有V型倾角结构,即在已加工好的水平流道内加工出倾角方向相同、倾角角度不同的多条倾斜流道,形成复合微流道60,因此,通过进样池获取的待测样品液,然后从水平流道40上的多条复合微流道流60至反应池50,并通过复合微流道60的倾角控制待测样品液流入反应池50,实现待测样品液与检测试剂充分反应,从而对待测样品液与检测试剂进行检测,其中,待测样品液、检测试剂可以为多种病毒,本实施例对此不作限制。
应当理解的是,例如,在微流控芯片10病毒检测的过程中,设置四个反应池50和水平流道40,其中反应池可50放置四种不同病毒的检测试剂,待测样品液含多种病毒,通过控制水平流道40内的流速,根据不同病毒混合反应时长的区别,保证四个反应池50中待测样品液与检测试剂混合的均匀度,通过负压驱动,流道V型夹角和倾角控制流速达到多种病毒的有效精准检测要求。
进一步的,所述水平流道40沿深度逐渐增大的方向带有预设层复合V型倾角结构的多条复合微流道60,每层复合微流道60设置不同的流道V型角度、倾角以及深度。
参照图2,应当理解的是,在具体实施过程中,可以以三层复合微流道60进行说明,本实施例对此不作限制,在微流控芯片10基板20表面加工出的多条水平流道40,其中水平流道40带有3层复合V型倾角结构的复合微流道60,深度可以为h,每层是沿深度逐渐增大的方向设置的,每一层V型角度分别为α
进一步的,所述复合微流道60的V型夹角逐渐减小,深度逐渐加深,将芯片键合封装以形成负压环境,其中,所述深度范围为300~400um。
可以理解的是,为了使水平流道上的多条复合微流道流60至反应池中的待测样品液与检测试剂充分反应,一般设置复合微流道的V型夹角逐渐减小,即α
进一步的,所述复合微流道60的第一层水平流道V型角度范围为90~120°,第二层倾角流道V型角度范围为60~90°,倾角为0~1°,第三层倾角流道V型角度范围为30~60°,倾角为1~2°。
可以理解的是,复合微流道60的第一层可以为水平流道,即第一层倾角β
进一步的,所述基板20采用的材料包括石英玻璃或者亚克力。
应当理解的是,微流控芯片10基板20材料可以为石英玻璃、亚克力等,本实施例对此不作限制。
本实施例提出一种微流控芯片10,所述微流控芯片10包括:基板20;设置在所述基板20上的依次连接的进样池30、水平流道40以及反应池50,所述水平流道40的入口连接所述进样池30,所述水平流道40的出口连接所述反应池50,其中,所述水平流道40上设有多条复合微流道60,所述复合微流道60设有V型倾角结构;所述进样池30,用于获取待测样品液;所述水平流道40,用于根据所述复合微流道60的倾角控制所述待测样品液流入所述反应池50;所述反应池50,用于对所述待测样品液与检测试剂进行检测。通过合理调节每条复合微流道60的参数,控制每条复合微流道60中待测样品液流入反应池50的速度,使得同时高效精准的检测出不同的病毒,从而无需复杂的外部辅助设备,通过简单的V型倾角结构进行速度微控,同时能够实现多种病毒的有效精准检测。
进一步的,参照图4,图4为本发明流速控制方法第一实施例的流程示意图。
需要说明的是,流速控制方法是基于微流控芯片,所述微流控芯片包括基板,设置在所述基板上的依次连接的进样池、水平流道以及反应池,所述水平流道的入口连接所述进样池,所述水平流道的出口连接所述反应池,其中,所述水平流道上设有多条复合微流道,所述复合微流道设有V型倾角结构。
在第一实施例中,所述流速控制方法包括以下步骤:
步骤S10,确定所述复合微流道的层数。
需要说明的是,由于在V型水平流道中依次加工出倾角方向相同的多条倾斜流道,而微流道沿深度逐渐增大的方向依次形成多层复合微流道,因此,需要确定复合微流道的层数,本实施例对此不作限制。
步骤S20,在所述层数大于一层时,则获取当前负压、当前层复合微流道的当前层深度、当前层流道V型角度以及当前层倾角。
可以理解的是,通过确定复合微流道的层数大于一层时,根据以及设置的微流控芯片可以确定当前负压以及待测样品液流入当前层复合微流道的当前层深度、当前层流道V型角度以及当前层倾角,例如,待测样品液流入第一层复合微流道时对应的当前层复合微流道的当前层深度、当前层流道V型角度以及当前层倾角为第一层深度、第一层流道V型角度以及第一层倾角,然后待测样品液流入第二层复合微流道时对应的当前层复合微流道的当前层深度、当前层流道V型角度以及当前层倾角为第二层深度、第二层流道V型角度以及第二层倾角等。
步骤S30,根据所述当前负压、所述当前层深度以及所述当前层倾角确定待测样品液在当前层复合微流道的速度。
可以理解的是,首先确定待测样品液中微流体的密度、微流体与流道的接触角以及当前层V型截面等效圆的半径,然后根据当前负压、当前层深度、微流体与流道的接触角、当前层倾角、当前层V型截面等效圆的半径以及微流体的密度通过计算公式确定前层复合微流道的速度。
对应的,所述根据所述当前负压、所述当前层深度、所述当前层流道V型角度、所述当前层倾角、所述当前层V型截面等效圆的半径以及所述微流体的密度确定前层复合微流道的速度计算公式为:
其中,v
进一步的,确定当前层V型截面等效圆的半径,包括:
根据所述当前层深度和所述前层流道V型角度计算当前层V型截面等效圆的半径。
可以理解的是,根据当前层深度和前层流道V型角度可以通过计算公式计算当前层V型截面等效圆的半径。
对应的,所述根据所述当前层深度和所述前层流道V型角度计算当前层V型截面等效圆的半径计算公式为:
其中,r
需要说明的是,若所述层数为一层时或者待测样品液从第一层水平流道进入到第二层倾角流道时,即第一层为水平流道,则确定所述复合倾角流道第一层倾斜流道对应的的第一长度、微流体的粘度、恒定负压以及微流体的表面张力;根据所述第一长度、所述微流体的粘度、所述恒定负压、所述微流体的表面张力以及第一层V型截面等效圆截面的半径确定第一层复合微流道的速度计算公式为:
其中,p为所述恒定负压,σ为所述微流体的表面张力,θ为微流体与流道的接触角,l
步骤S40,根据所述当前层复合微流道的速度确定复合微流道的速度集合。
可以理解的是,速度集合是待测样品液从复合微流道第一层流到复合微流道的确定层数,得到每一层对应速度的集合,例如,若复合微流道的确定层数为3层,则,待测样品液从第一层水平流道进入到第二层倾角流道时的第一层复合微流道的速度:
待测样品液从第二层倾角流道进入到第三层倾角流道时的第二层复合微流道的速度:
待测样品液从第三层倾角流道进入反应池第三层复合微流道的流速:
其中,p为当前负压,σ为微流体的表面张力,θ为所述微流体与流道的接触角,μ为微流体的粘度,l
步骤S50,根据所述复合微流道的速度集合控制所述待测样品液从所述进样池流入所述反应池。
可以理解的是,复合微流道的速度集合为每层复合微流道内的流速,通过控制流道内的流速,可以有效控制待测样品液从进样池流入反应池,进而可以根据不同病毒混合反应时长的区别,保证反应池中待测样品液与检测试剂混合的均匀度。
本实施例通过确定所述复合微流道的层数;在所述层数大于一层时,则获取当前负压、当前层复合微流道的当前层深度、当前层流道V型角度以及当前层倾角;根据所述当前负压、所述当前层深度以及所述当前层倾角确定待测样品液在当前层复合微流道的速度;根据所述当前层复合微流道的速度确定复合微流道的速度集合;根据所述复合微流道的速度集合控制所述待测样品液从所述进样池流入所述反应池。通过控制负压、复合微流道的深度、V型角度和倾角便可以控制流道内待测样品液流速的大小,根据病毒不同的混合反应时长,合理调节每条复合微流道的参数,控制每条复合微流道中待测样品液流入反应池的速度,使得同时高效精准的检测出不同的病毒。
本发明所述微流控芯片及流速控制方法的其他实施例或具有实现方法可参照上述各方法实施例,此处不在赘余。
以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是在本发明的发明构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。
- 微流控芯片及流速控制方法
- 微流控芯片、分析装置和微流控芯片的控制方法