一种清洁设备的控制方法及装置
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及机器人控制领域,尤其涉及一种清洁设备的控制方法及装置。
背景技术
传统泳池清洁依靠人工打捞和冲洗,效率低且效果差。随着智能生活的普及,人们对自动清洁设备的需求与日俱增,近20年出现的自动清洁机器人在一定程度上解决了泳池清洁的自动化问题。
但现有技术中传统的清洁设备只能进行90度弓形清洁,该传统的清洁设备仅适用在规则矩形池底,当在不规则形状的池底工作时,90度转弯后清洁设备侧边与池壁不平行,弓形短边会留下区域没有清扫,导致泳池中部区域过渡清扫,边界区域清洁不足,清扫效率低。且现有技术中的清洁设备只依靠陀螺仪进行触墙判断,无法预先测量与墙之间的距离及角度,清洁设备在触墙后才执行刹车停止,导致清洁设备的姿态在触墙的一瞬间发生变化和偏移,以至于清洁设备经常偏离预设线路。
发明内容
本发明提出一种清洁设备的控制方法及装置,所述方法提高了清洁设备清扫泳池的效率和精度。
本申请实施例的第一方面提供了一种清洁设备的控制方法,所述清洁设备设置有红外传感器和角速度传感器;所述控制方法包括:在所述清洁设备直行时,获取所述红外传感器实时采集的第一ADC值,当所述第一ADC值大于第一预设值时,控制所述清洁设备停止直行;
控制所述清洁设备向预设方向旋转,直到所述红外传感器实时采集的第二 ADC值小于第二预设值时,停止旋转;
根据所述角速度传感器上传角度数据,计算第一旋转角度和第一行走距离;其中,所述角速度传感器用于采集所述清洁设备运行方向与前方障碍物之间的角度;
先控制所述清洁设备向前直行第一行走距离后停止,再控制所述清洁设备向所述预设方向旋转所述第一旋转角度后,控制所述清洁设备直行。
在第一方面的一种可能的实现方式中,所述根据所述角速度传感器上传角度数据,计算第一旋转角度和第一行走距离,其中,计算所述第一旋转角度,具体为:
当所述第一ADC值大于第一预设值时,控制所述清洁设备停止直行,控制角速度传感器用于采集所述清洁设备运行方向与前方障碍物之间的角度,记录为第一角度;
直到所述红外传感器实时采集的第二ADC值小于第二预设值时,停止旋转,控制角速度传感器用于采集所述清洁设备运行方向与前方障碍物之间的角度,记录为第二角度;
根据所述角速度传感器上传所述第一角度和所述第二角度数据,计算第一旋转角度;所述第一旋转角度为所述第一角度与所述第二角度之差的绝对值。
在第一方面的一种可能的实现方式中,所述根据所述角速度传感器上传角度数据,计算第一旋转角度和第一行走距离,其中,计算所述第一行走距离,具体为:
L1=S/sin(|α1-α2|)
其中,L1为所述第一行走距离,α1为所述第一角度,α2为所述第二角度,S 为设定间距。
本申请实施例的第二方面提供了一种清洁设备的控制装置,所述清洁设备设置有红外传感器和角速度传感器;所述控制装置包括:刹车模块、第一旋转模块、计算模块、第二直行模块和第二旋转模块;
所述刹车模块,用于在所述清洁设备直行时,获取所述红外传感器实时采集的第一ADC值,当所述第一ADC值大于第一预设值时,控制所述清洁设备停止直行;
所述第一旋转模块,用于控制所述清洁设备向预设方向旋转,直到所述红外传感器实时采集的第二ADC值小于第二预设值时,停止旋转;
所述计算模块,用于根据所述角速度传感器上传角度数据,计算第一旋转角度和第一行走距离;其中,所述角速度传感器用于采集所述清洁设备运行方向与前方障碍物之间的角度;
所述直行模块,用于控制所述清洁设备向前直行第一行走距离后停止;
所述第二旋转模块,用于控制所述清洁设备向所述预设方向旋转所述第一旋转角度后,控制所述清洁设备直行。
在第二方面的一种可能的实现方式中,所述计算模块,用于根据所述角速度传感器上传角度数据,计算第一旋转角度和第一行走距离,其中,计算所述第一旋转角度,具体为:
当所述第一ADC值大于第一预设值时,控制所述清洁设备停止直行,控制角速度传感器用于采集所述清洁设备运行方向与前方障碍物之间的角度,记录为第一角度;
直到所述红外传感器实时采集的第二ADC值小于第二预设值时,停止旋转,控制角速度传感器用于采集所述清洁设备运行方向与前方障碍物之间的角度,记录为第二角度;
根据所述角速度传感器上传所述第一角度和所述第二角度数据,计算第一旋转角度;所述第一旋转角度为所述第一角度与所述第二角度之差的绝对值。
在第二方面的一种可能的实现方式中,所述计算模块,用于根据所述角速度传感器上传角度数据,计算第一旋转角度和第一行走距离,其中,计算所述第一行走距离,具体为:
L1=S/sin(|α1-α2|)
其中,L1为所述第一行走距离,α1为所述第一角度,α2为所述第二角度,S 为设定间距。
本发明实施例提供的一种清洁设备的控制方法及装置,其有益效果在于:本发明实施例的控制方法,在采集的第一ADC值大于第一预设值时,先控制清洁设备停止直行;其次控制清洁设备向预设方向旋转,当采集的第二ADC值小于第二预设值时,停止旋转;然后计算第一旋转角度和第一行走距离;接着控制所述清洁设备向前直行第一行走距离后停止,最后控制所述清洁设备向所述预设方向旋转所述第一旋转角度后,控制所述清洁设备直行。上述控制方法,在泳池形状不规则时,以清洁设备运行方向与前方障碍物之间的角度为依据,控制清洁设备进行相应角度的转弯,以实现对不规则泳池的全覆盖清洁;通过 ADC值预先对墙壁的距离进行判断,当清洁设备即将触墙时,提前减速,让清洁设备在触墙之前停下来,保证清洁设备精准地按照设定轨道运行,从而最终提高了清洁设备清扫泳池的效率和精度。
附图说明
图1是本发明一实施例提供的一种清洁设备的控制方法的流程示意图;
图2是本发明一实施例提供的现有技术中清洁设备的传统清洁路径与本方案清洁设备的清洁路径的对比示意图;
图3是本发明一实施例提供的一种清洁设备遇墙转弯的路径示意图;
图4是本发明一实施例提供的一种清洁设备的控制装置的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
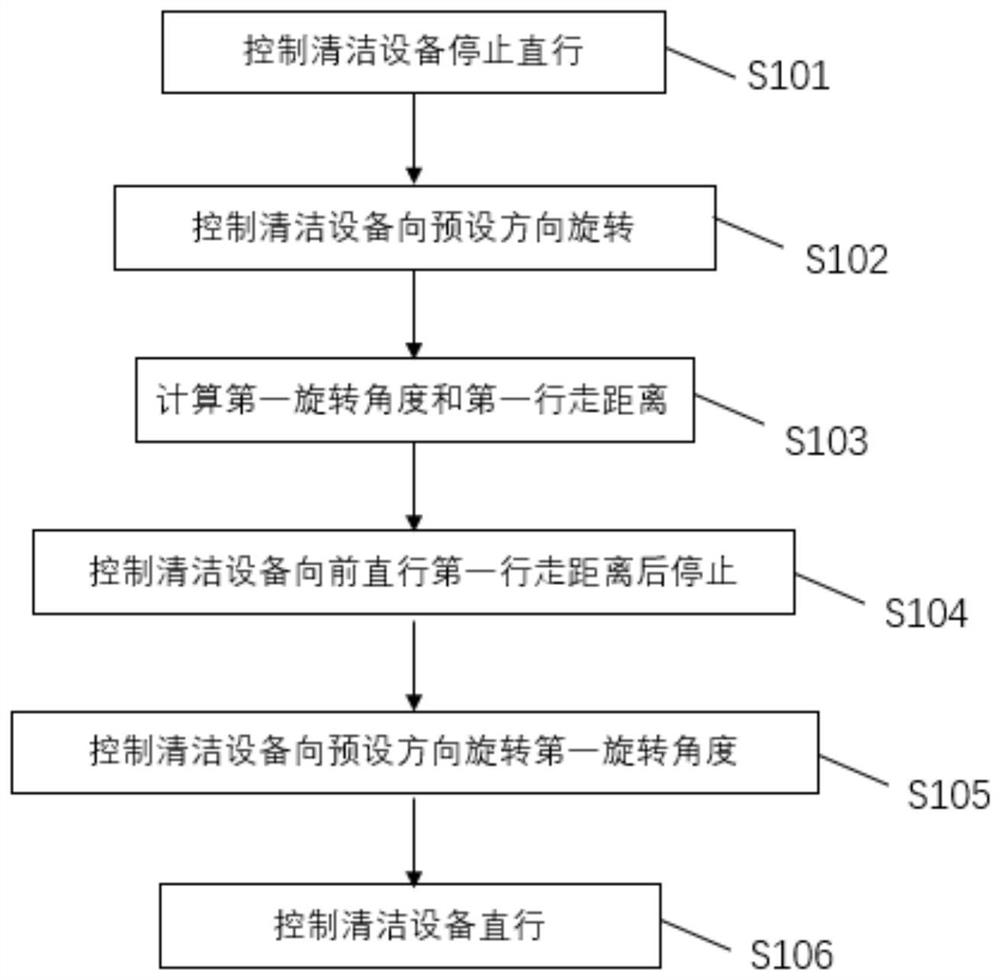
参照图1,图1为本发明一实施例提供的一种清洁设备的控制方法的流程示意图,包括:
S101、控制清洁设备停止直行。
在本实施例中,在清洁设备直行时,获取红外传感器实时采集的第一ADC 值,当第一ADC值大于第一预设值时,控制清洁设备停止直行。
在一具体实施例中,第一预设值可以是1700。
S102、控制清洁设备向预设方向旋转。
在本实施例中,控制清洁设备向预设方向旋转,直到红外传感器实时采集的第二ADC值小于第二预设值时,停止旋转。
在一具体实施例中,第二预设值可以是100。
在本实施例中,预设方向可以是左方、右方中的任意一种。
S103、计算第一旋转角度和第一行走距离。
在本实施例中,根据角速度传感器上传角度数据,计算第一旋转角度和第一行走距离;其中,角速度传感器用于采集清洁设备运行方向与前方障碍物之间的角度。
在一具体实施例中,角度传感器可以是陀螺仪。
在一具体实施例中,当第一ADC值大于第一预设值时,控制清洁设备停止直行,控制角速度传感器用于采集清洁设备运行方向与前方障碍物之间的角度,记录为第一角度;直到红外传感器实时采集的第二ADC值小于第二预设值时,停止旋转,控制角速度传感器用于采集清洁设备运行方向与前方障碍物之间的角度,记录为第二角度;根据角速度传感器上传第一角度和第二角度数据,计算第一旋转角度;第一旋转角度为第一角度与第二角度之差的绝对值。
在一具体实施例中,第一行走距离通过以下公式计算可得:
L1=S/sin(|α1-α2|)
其中,L1为第一行走距离,α1为第一角度,α2为第二角度,S为设定间距。设定距离S通过以下公式计算可得:
0.5D≤S≤2D
其中,D为清洁设备的机身宽度,D的值可以为50cm。
S104、控制清洁设备向前直行第一行走距离后停止。
S105、控制清洁设备向预设方向旋转第一旋转角度。
S106、控制清洁设备直行。
为了更好地说明,在泳池形状不是规则矩形时,本发明的控制方法与传统的控制方法控制清洁设备在清洁泳池的效果、效率上的区别,请参照图2,图2 为本发明一实施例提供的现有技术中清洁设备的传统清洁路径与本方案清洁设备的清洁路径的对比示意图。
其中,图2中的左图为现有技术中清洁设备的传统清洁路径,图2中的右图为本方案清洁设备的清洁路径。
由此我们明显可得,传统的控制方法在控制清洁设备遇墙转弯时,只能让所述清洁设备按照固定角度90度进行转向,且转弯之前清洁设备的头部需要与池壁垂直,当池底不规则时或者因陀螺仪偏移而清洁设备的头部与池壁不垂直时,会导致转弯效果不佳。而且如果90度转弯后清洁设备的侧边与池壁不平行,如图2左图中的深色区域所示,弓形短边会留下一片三角形区域没有清扫,影响清扫效率。当清洁设备进入短边清扫时,若清洁设备碰墙,则清洁设备会提前转弯,如图1圆圈部分所示,从而导致清洁设备的来回两条线路相隔太近,几乎原路返回,从而使得传统的控制方法控制清洁设备过渡清扫中部区域,而边部区域清洁不足,降低了清扫效率,影响了清扫的效果。
相比之下,本申请方案的控制方法在控制清洁设备遇墙转弯时,清洁设备的头部不需要与池壁垂直,也不是让清洁设备按照固定角度90度进行转向,而是以清洁设备运行方向与前方障碍物之间的角度为依据,控制清洁设备进行相应角度的转弯。如图2中的右图所示,在本申请方案的控制方法的控制下,该清洁设备在遇墙转弯清扫时的行走路径十分贴近墙壁,从而实现对泳池的全覆盖清扫,解决了传统控制方法而导致的漏扫问题。而且本申请方案的控制方法保证了清洁设备来回两条线路的间距一定,不会因为墙的形状不规则而改变,保证清洁轨迹规则、全面覆盖泳池,从而提高了泳池清洁的效率和效果。
为了更好地说明第一行走距离的计算原理,请参照图3,图3本发明一实施例提供的一种清洁设备的控制装置的结构示意图。
图中a(1)为第一旋转角度,L1为第一行走距离,S为设定间距。由图我们清楚可得,第一旋转角度a(1)与第一行走距离L1和设定间距S的关系,满足以下公式:
L1=S/sin(a(1))
由于第一旋转角度a(1)为第一角度α1与第二角度α2之差的绝对值,即:
a(1)=|α1-α2|
于是第一旋转角度a(1)与第一行走距离L1和设定间距S的关系可以表达为:
L1=S/sin(a(1))=S/sin(|α1-α2|)
通过图3,可以清楚地了解第一行走距离的计算原理;同时根据上述公式,在第一旋转角度不同的前提下,通过计算不同的第一行走距离,保证清洁设备来回两条线路的间距为预设间距S不变,从而使清洁设备的清洁轨迹保持规则有序。
为了进一步说明清洁设备的控制装置,请参照图4,图4为本发明一实施例提供的一种清洁设备的控制装置的结构示意图,包括:刹车模块201、第一旋转模块202、计算模块203、第二直行模块204和第二旋转模块205。
刹车模块201,用于在清洁设备直行时,获取红外传感器实时采集的第一 ADC值,当第一ADC值大于第一预设值时,控制清洁设备停止直行。
在一具体实施例中,第一预设值可以是1700。
第一旋转模块202,用于控制清洁设备向预设方向旋转,直到红外传感器实时采集的第二ADC值小于第二预设值时,停止旋转。
在一具体实施例中,第二预设值可以是100。
在本实施例中,预设方向可以是左方、右方中的任意一种。
计算模块203,用于根据所述角速度传感器上传角度数据,计算第一旋转角度和第一行走距离;其中,角速度传感器用于采集清洁设备运行方向与前方障碍物之间的角度。
在一具体实施例中,当第一ADC值大于第一预设值时,控制清洁设备停止直行,控制角速度传感器用于采集清洁设备运行方向与前方障碍物之间的角度,记录为第一角度;直到红外传感器实时采集的第二ADC值小于第二预设值时,停止旋转,控制角速度传感器用于采集清洁设备运行方向与前方障碍物之间的角度,记录为第二角度;根据角速度传感器上传第一角度和第二角度数据,计算第一旋转角度;第一旋转角度为第一角度与第二角度之差的绝对值。
在一具体实施例中,第一行走距离通过以下公式计算可得:
L1=S/sin(|α1-α2|)
其中,L1为第一行走距离,α1为第一角度,α2为第二角度,S为设定间距。设定距离S通过以下公式计算可得:
0.5D≤S≤2D
其中,D为清洁设备的机身宽度,D的值可以为50cm。
第二直行模块204于控制清洁设备向前直行第一行走距离后停止。
第二旋转模块205用于控制清洁设备向预设方向旋转第一旋转角度后,控制清洁设备直行。
本发明实施例先通过刹车模块201,在采集的第一ADC值大于第一预设值时,先控制清洁设备停止直行;其次通过第一旋转模块202,控制清洁设备向预设方向旋转,当采集的第二ADC值小于第二预设值时,停止旋转;然后通过计算模块203,计算第一旋转角度和第一行走距离;接着通过第二直行模块204,控制所述清洁设备向前直行第一行走距离后停止,最后通过第二旋转模块205,控制所述清洁设备向所述预设方向旋转所述第一旋转角度后,控制所述清洁设备直行。上述控制装置,在泳池形状不规则时,以清洁设备运行方向与前方障碍物之间的角度为依据,控制清洁设备进行相应角度的转弯,以实现对不规则泳池的全覆盖清洁;通过ADC值预先对墙壁的距离进行判断,当清洁设备即将触墙时,提前减速,让清洁设备在触墙之前停下来,保证清洁设备精准地按照设定轨道运行,从而最终提高了清洁设备清扫泳池的效率和精度。
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
- 一种自动清洁设备控制方法、装置、自动清洁设备和介质
- 清洁设备的控制方法、装置、清洁设备及可读存储介质