一种回收AUV的平移拉入式机械爪
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及自动化技术领域,具体为一种回收AUV的平移拉入式机械爪。
背景技术
机械爪因其效率高、稳定性好、恶劣环境适应性强等优点受到广泛地研究和应用,并在自动化等诸多领域转化为生产力。机械爪作为一种自动化生产设备,是机械化和自动化发展过程中应运而生的产物,可完成指定的作业任务。机械爪的准确性和高效性使之能够代替人工,成为工业自动化生产的重要组成部分,具有广阔的发展前景。
然而传统的机械爪在使用时存在以下缺点:
1、传统机械爪存在兼容性地、灵活性差、自主性弱等缺点;
2、传统的机械爪在使用时,特别在水下工作时,由于水下环境复杂,长期浸泡在水中导致机械爪容易腐蚀受损;
3、传统的机械爪在回收AUV过程中,由于AUV相对于其他夹取物体而言,重量和体型都较为庞大,传统机械爪难以灵活地调整夹取的姿势和力度,容易出现受力不均匀等现象进而损坏机械爪,所以传统的机械爪不能很好地回收任意姿态大小的AUV。
发明内容
本发明的目的在于提供一种回收AUV的平移拉入式机械爪,以解决上述背景技术中提出传统的机械爪难以适应多种不同大小和姿态的AUV,工作效率低、无法智能化夹取与回收AUV,且机械爪容易受损的问题。
为实现上述目的,本发明提供如下技术方案:一种回收AUV的平移拉入式机械爪,包括月牙传动机构,所述月牙传动机构外围嵌套连接有半圆外壳,且半圆外壳的顶端固定连接有双目摄像机,并且半圆外壳的内部设置有舵机主体,所述半圆外壳的底部固定连接有滑翔机回收通道,且滑翔机回收通道的内部轴连接有回收通道滚轮,所述舵机主体上轴连接有舵机中间传动机构,且舵机中间传动机构的顶端铰接有月牙传动机构,所述月牙传动机构尾部固定连接有滑动部件,且滑动部件上轴连接有主驱动轮,所述滑动部件上轴连接有从驱动轮,且从驱动轮的外表面固定连接有驱动轮外壳,所述从驱动轮的下方铰接有三角机械爪,且三角机械爪的内部轴连接有滑轮,所述三角机械爪的内部嵌设有履带,且履带的表面设置有柔性突起部件,所述三角机械爪末端的外表面设置有液压缸转向机构,且液压缸转向机构铰接液压传动机构,并且液压传动机构设置在三角机械爪末端的外表面,所述三角机械爪末端轴连接有弧形副爪,且弧形副爪的外表面固定连接有液压传动机构,所述三角机械爪上设置有力觉传感器。
优选的,所述舵机中间传动机构的结构结构形状为菱形结构,且月牙传动机构为圆弧状结构,并且月牙传动机构铰接在舵机中间传动机构两侧,并且关于舵机中间传动机构的中心点呈中心对称。
优选的,所述三角机械爪绞接在末端的从驱动轮上,且三角机械爪内分别在三角形的三个顶点上固定装有从驱动轮,构成稳定的三角形结构。
优选的,所述三角机械爪的内部设置有多个力觉传感器。
优选的,所述柔性突起部件均匀分布在履带的外表面,且柔性突起部件之间的间隔距离相同。
优选的,所述弧形副爪呈交错式结构,且在机械爪闭合时弧形副爪之间相互铰接。
优选的,所述滑翔机回收通道内部均匀设置有回收通道滚轮,且回收通道滚轮之间的间隔距离相同。
与现有技术相比,本发明的有益效果是:该回收AUV的平移拉入式机械爪可以通过舵机主体实时控制舵机中间传动机构和月牙传动机构的运动,进而驱动三角机械爪做平移拉入式运动,并能根据滑翔机的姿态调整平移幅度的大小,以自适应AUV规格,且从驱动轮在转动的同时带动附着在三角机械爪上的履带进行滚动传输,实现对AUV的灵活回收,回收后的AUV经过回收通道自动传输至后续的接收装置中:
1、通过设置的四组三角机械爪、弧形副爪、从驱动轮经过滑动部件和半圆外壳连接形成一个完整的闭环,使得回收后的AUV至于该装置内部,在舵机主体的驱动下,使得舵机主体中间传动机构和月牙传动机构自动旋转和平移,并配合滑动部件、从驱动轮、三角机械爪以及弧形副爪之间的铰接,实现整体机械爪同步做平移拉入式运动,结构简单,自由度高,且力觉传感器将AUV与机械爪接触时产生的力信息反馈到舵机主体上,使得机械爪的夹取与放松程度变得极易控制;
2、通过设置的履带和柔性突起部件与三角机械爪构成闭合环状结构,当 AUV与履带接触时,从驱动轮工作带动履带滚动运输,履带的运动带动AUV自下而上地传输至滑翔机回收通道,并且由于履带上附有大量柔性突起部件,使得AUV与机械爪之间的摩檫力和阻力增大,能有效防止AUV脱落;
3、通过设置的液压缸转向机构和液压传动机构,配合三角机械爪底部的弧形副爪,当AUV完全进入机械爪内部,液压传动装置驱动两对弧形副爪相互铰接,形成闭合环状结构,能够有效防止AUV完全从机械爪中脱落。
附图说明
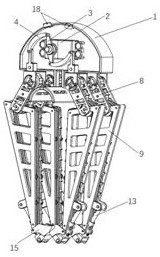
图1为本发明整体结构示意图;
图2为本发明立体侧面结构示意图;
图3为本发明立体俯视结构示意图;
图4为本发明驱动部件正视结构示意图;
图5为本发明弧形副爪张开正侧结构示意图;
图6为本发明弧形副爪闭合正侧结构示意图。
图中:1、半圆外壳;2、舵机主体;3、舵机中间传动机构;4、月牙传动机构;5、滑动部件;6、主驱动轮;7、从驱动轮;8、驱动轮外壳;9、三角机械爪;10、滑轮;11、履带;12、柔性突起部件;13、液压缸转向机构; 14、液压传动机构;15、弧形副爪;16、滑翔机回收通道;17、回收通道滚轮;18、双目摄像机;19、力觉传感器。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-6,本发明提供一种技术方案:一种回收AUV的平移拉入式机械爪,包括半圆外壳1、舵机主体2、舵机中间传动机构3、月牙传动机构4、滑动部件5、主驱动轮6、从驱动轮7、驱动轮外壳8、三角机械爪9、滑轮 10、履带11、柔性突起部件12、液压缸转向机构13、液压传动机构14、弧形副爪15、滑翔机回收通道16、回收通道滚轮17、双目摄像机18、力觉传感器19,月牙传动机构4外围嵌套连接有半圆外壳1,且半圆外壳1的顶端固定连接有双目摄像机18,并且半圆外壳1的内部设置有舵机主体2,半圆外壳1的底部固定连接有滑翔机回收通道16,且滑翔机回收通道16的内部轴连接有回收通道滚轮17,舵机主体2上轴连接有舵机中间传动机构3,且舵机中间传动机构3的顶端铰接有月牙传动机构4,月牙传动机构4尾部固定连接有滑动部件5,且滑动部件5上轴连接有主驱动轮6,滑动部件5上轴连接有从驱动轮7,且从驱动轮7的外表面固定连接有驱动轮外壳8,从驱动轮7 的下方铰接有三角机械爪9,且三角机械爪9的内部轴连接有滑轮10,三角机械爪9的内部嵌设有履带11,且履带11的表面设置有柔性突起部件12,三角机械爪9末端的外表面设置有液压缸转向机构13,且液压缸转向机构13 铰接液压传动机构14,并且液压传动机构14设置在三角机械爪9末端的外表面,三角机械爪9末端轴连接有弧形副爪15,且弧形副爪15的外表面固定连接有液压传动机构14,三角机械爪9上设置有力觉传感器19。
舵机中间传动机构3的结构结构形状为菱形结构,且月牙传动机构4为圆弧状结构,并且月牙传动机构4铰接在舵机中间传动机构3两侧,并且关于舵机中间传动机构3的中心点呈中心对称,能便于使得舵机主体2、舵机中间传动机构3和月牙传动机构4之间可以形成一种可自由旋转和平移的结构。
三角机械爪9绞接在末端的从驱动轮7上,且三角机械爪9内分别在三角形的三个顶点上固定装有从驱动轮7,构成稳定的三角形结构,能便于使得机械爪可以更加的坚固和稳定。
三角机械爪9的内部设置有多个力觉传感器19,能便于与舵机主体2表面的双目摄像机18共同工作,以最佳的夹取方式回收AUV,从而可以避免三角机械爪9由于夹取姿势和受力不当而造成损坏。
柔性突起部件12均匀分布在履带11的外表面,且柔性突起部件12之间的间隔距离相同,能便于在回收AUV的过程中,可以增加履带11表面的摩擦力和阻力。
弧形副爪15呈交错式结构,且在机械爪闭合时弧形副爪15之间相互铰接,能便于保持弧形副爪15结构的稳定,且可以有效防止回收AUV完全从机械爪中脱落。
滑翔机回收通道16内部均匀设置有回收通道滚轮17,且回收通道滚轮 17之间的间隔距离相同,能便于使得回收传输工作更加高效、简便。
工作原理:在使用该回收AUV的平移拉入式机械爪时,根据图1-6所示,首先可以通过双目摄像机18来获取AUV的曝光图像,接着通过舵机主体2来实时控制舵机中间传动机构3和月牙传动机构4进行旋转;
在舵机中间传动机构3和月牙传动机构4进行旋转时,可以带动三角机械爪9做平移拉入式运动,并调整到一个最佳夹取宽度以适应AUV的姿态,当AUV与机械爪接触时,在主驱动轮6的带动下使得从驱动轮7开始转动,且从驱动轮7转动的同时带动履带11滚动运输,并带动AUV自下而上地运输至滑翔机回收通道16,同时,力觉传感器19感知AUV与机械爪接触时产生的力信息,并将力信息反馈回舵机主体2,舵机主体2实时控制传动机构的拉伸状态和机械爪的夹取力度,防止受力不均导致机械爪损坏。
然后,在柔性突起部件12的作用下,AUV与机械爪之间的摩檫力增大,从而使得AUV不轻易脱落机械爪,当AUV完全进入机械爪内部时,液压缸转向机构13配合液压传动机构14使用进而驱动两对弧形副爪15相互铰接,从而使得三角机械爪9与弧形副爪15之可以闭合,使得整个机械爪处于锁紧状态,即可将整个AUV包裹在机械爪内,保证AUV不轻易完全脱落,本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
需要理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为便于描述本发明和简化描述,而不是指示或暗指所指的装置或元件必须具有特定的方位、为特定的方位构造和操作,因而不能理解为对本发明保护内容的限制。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种回收AUV的平移拉入式机械爪
- 一种回收AUV的平移拉入式机械爪