激光加工设备
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及激光加工技术领域,尤其涉及一种激光加工设备。
背景技术
在激光加工行业,尤其是加工玻璃等脆性材料的激光加工设备,自动化程度都相对较高。一方面可以节省人工成本,为企业创造更多的利益,另一方面减少人工参与,保证产品的洁净度,提高产品的良率。
但是,现有的激光加工装置,通常设置一个上料位、一个加工位和一个下料位,上料位上设有用于供料的料盒,通过上下料机构(如机械手)来实现上料与下料,但是在上料与下料的过程中,加工位上没有工件可以加工,此时激光加工系统存处于等待状态,另外,当料盒内的料加工完毕后,需要设备停机更换料盒,综上,在上下料和更换料盒的过程中,由于加工位上没有工件,激光加工系统未被利用,导致设备加工效率低下。
发明内容
本发明实施例提供了一种激光加工设备,用于解决现有的激光加工装置在上下料和更换料盒的过程中,激光加工系统处于未被利用,导致设备加工效率低下的问题。
根据本发明实施例,该激光加工设备包括:
上下料部分,所述上下料部分包括第一上下料机构和第二上下料机构,所述第一上下料机构和第二上下料机构分别具有用于放置工件的第一容置位和第二容置位;
工件定位部分,所述工件定位部分包括第一定位机构和第二定位机构,所述第一定位机构包括第一调位模组以及设于所述第一调位模组上的第一定位治具,所述第二定位机构包括第二调位模组以及设于所述第二调位模组上的第二定位治具;
视觉定位系统,用于对位于所述工件定位部分的工件进行视觉定位;
激光加工系统,用于对视觉定位后的工件进行激光加工;以及
移料机构,用于将所述上下料部分的工件移动至所述工件定位部分进行定位和激光加工,以及将加工完毕后的工件移回所述上下料部分。
在所述激光加工设备的一些实施例中,所述第一上下料机构和所述第二上下料机构分别位于所述工件定位部分的两侧,所述第一上下料机构包括第一移动模组、设于所述第一移动模组的第一滑板以及设于所述第一滑板的第一料盒,所述第一容置位形成在所述第一料盒上,所述第二上下料机构包括第二移动模组、设于所述第二移动模组的第二滑板以及设于所述第二滑板的第二料盒,所述第二容置位形成在所述第二料盒上。
在所述激光加工设备的一些实施例中,所述激光加工系统包括第一运动模组、相对于所述第一运动模组固定设置的固定部分以及设于所述第一运动模组上的活动部分,所述第一运动模组位于所述工件定位部分的上方,所述固定部分包括用于发射激光光束的激光器和用于对激光光束进行引导的出射光路组件,所述活动部分包括第二运动模组、激光切割头以及将所述出射光路组件射出的激光光束引导至所述激光切割头的入射光路组件,所述第二运动模组和所述入射光路组件均设于所述第一运动模组上,所述激光切割头设于所述第二运动模组上。
在所述激光加工设备的一些实施例中,所述视觉定位系统设于所述第二运动模组上。
在所述激光加工设备的一些实施例中,所述出射光路组件包括沿激光光束的光路依次设置的扩束镜、第一反射镜片、第二反射镜片和出光管,所述激光器发射的激光光束经所述第一反射镜片和所述第二反射镜片反射后从所述出光管射出,所述扩束镜设于所述激光器与所述第一反射镜片之间。
在所述激光加工设备的一些实施例中,所述入射光路组件包括沿激光光束的光路依次设置的入光管、第三反射镜片和第四反射镜片,所述入光管与所述出光管同轴设置,射入所述入光管的激光光束依次经所述第三反射镜片和所述第四反射镜片反射后进入所述激光切割头。
在所述激光加工设备的一些实施例中,所述移料机构位于所述工件定位部分的上方,所述移料机构包括第一线性模组、第二线性模组和抓取组件,所述第二线性模组与所述第一线性模组组成十字型线性模组,所述抓取组件设于所述第二线性模组的滑块上,用于取放工件。
在所述激光加工设备的一些实施例中,所述激光加工设备还包括下机柜、设备主体和上罩组件,所述设备主体设于所述下机柜上,所述上下料部分、所述工件定位部分、所述视觉定位系统、所述激光加工系统以及所述移料机构均设于所述设备主体上,所述上罩组件设于所述下机柜的上方,并罩设在所述设备主体、所述上下料部分、所述工件定位部分、所述视觉定位系统、所述激光加工系统以及所述移料机构的外侧。
在所述激光加工设备的一些实施例中,所述设备主体包括设于所述下机柜的上方的底座、设于所述底座的立柱以及设于所述立柱的横梁,所述上下料部分和所述工件定位部分均设于所述底座,所述激光加工系统、所述视觉定位系统和所述移料机构均设于所述横梁。
在所述激光加工设备的一些实施例中,所述下机柜的内部设有控制器,所述控制器与所述上下料部分、所述工件定位部分、所述视觉定位系统、所述激光加工系统以及所述移料机构电性连接,所述上罩组件上包括罩体以及设于所述罩体的外侧并与所述控制器电性连接的报警灯、显示器以及操作面板。
实施本发明实施例,将具有如下有益效果:
通过在上下料部分设置第一上下料机构和第二上下料机构,在工件定位部分设置第一定位机构和第二定位机构,在视觉定位系统和激光加工系统在对第一定位机构上的工件进行视觉定位和激光加工时,移料机构将第一上下料机构上的工件移动至第二定位机构,当第一定位机构上的工件加工完毕后,激光加工系统可对第二定位机构上工件进行加工,同时移料机构将第一定位机构上加工后的工件移回原位置,再从第一定位机构上取出一未加工的工件放置在第一定位机构上,以此类推,当第一上下料机构中的工件全部加工完毕之后,移料机构再从第二上下料机构中取出工件进行加工,此时工人可以更换第一上下料机构上的产品,该设备在取放料和更换产品的过程中激光加工系统无需停机,提高了激光加工系统的利用率,提高了设备的加工效率。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
其中:
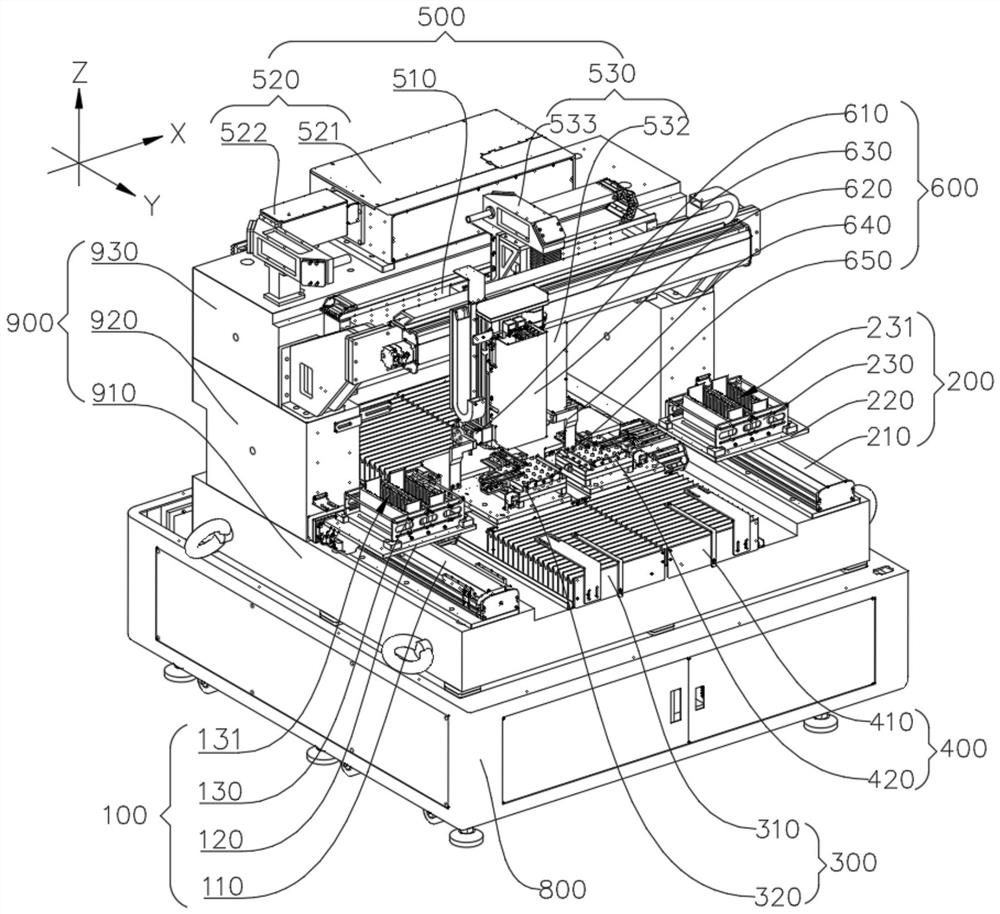
图1是本发明一实施例示出的激光加工设备的整体结构示意图;
图2是本发明一实施例示出的激光加工设备移除上罩组件后的结构示意图;
图3是本发明一实施例示出的激光加工设备的第一上下料机构的结构示意图;
图4是本发明一实施例示出的激光加工设备的第一定位治具的结构示意图;
图5是本发明一实施例示出的激光加工设备的激光加工系统的结构示意图;
图6是本发明一实施例示出的激光加工系统的出射光路组件的结构示意图;
图7是本发明一实施例示出的激光加工系统的入射光路组件的结构示意图;
图8是本发明一实施例示出的激光加工系统的移料机构的结构示意图。
主要元件符号说明:
100-第一上下料机构;110-第一移动模组;120-第一滑板;130-第一料盒;131-第一容置位;
200-第二上下料机构;210-第二移动模组;220-第二滑板;230-第二料盒;231-第二容置位;
300-第一定位机构;310-第一调位模组;311-滑动板;320-第一定位治具;321-吸附治具;322-限位部;323-驱动件;324-推杆;
400-第二定位机构;410-第二调位模组;420-第二定位治具;
500-激光加工系统;510-第一运动模组;511-滑座;520-固定部分;521-激光器;522-出射光路组件;5221-扩束镜;5222-第一反射镜片;5223-第二反射镜片;5224-出光管;530-活动部分;531-第二运动模组;5311-滑台;532-激光切割头;533-入射光路组件;5331-入光管;5332-第三反射镜片;5333-第四反射镜片;
600-移料机构;601-固定座;610-第一线性模组;620-第二线性模组;621-滑块;630-旋转气缸;640-摆臂;650-吸盘;
700-视觉定位系统;
800-下机柜;
900-设备主体;910-底座;920-立柱;930-横梁;
1000-上罩组件;1010-罩体;1020-报警灯;1030-显示器;1040-操作面板。
具体实施方式
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳的实施例。但是,本发明可以通过许多其他不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。
需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
现有的激光加工装置,通常设置一个上料位、一个加工位和一个下料位,上料位上设有用于供料的料盒,通过上下料机构(如机械手)来实现上料与下料,但是在上料与下料的过程中,加工位上没有工件可以加工,此时激光加工系统存处于等待状态,另外,当料盒内的料加工完毕后,需要设备停机更换料盒,综上,在上下料和更换料盒的过程中,由于加工位上没有工件,激光加工系统未被利用,导致设备加工效率低下。
对此,本发明实施例中的激光加工设备通过在上下料部分设置第一上下料机构和第二上下料机构,在工件定位部分设置第一定位机构和第二定位机构,在视觉定位系统和激光加工系统在对第一定位机构上的工件进行视觉定位和激光加工时,移料机构将第一上下料机构上的工件移动至第二定位机构,当第一定位机构上的工件加工完毕后,激光加工系统可对第二定位机构上工件进行加工,同时移料机构将第一定位机构上加工后的工件移回原位置,再从第一定位机构上取出一未加工的工件放置在第一定位机构上,以此类推,当第一上下料机构中的工件全部加工完毕之后,移料机构再从第二上下料机构中取出工件进行加工,此时工人可以更换第一上下料机构上的产品,该设备在取放料和更换产品的过程中激光加工系统无需停机,提高了激光加工系统的利用率,提高了设备的加工效率。
在一种实施例中,如图2所示,该激光加工设备包括上下料部分、工件定位部分、视觉定位系统700、激光加工系统500和移料机构600。
该上下料部分包括第一上下料机构100和第二上下料机构200,第一上下料机构100和第二上下料机构200分别具有用于放置工件的第一容置位131和第二容置位231。
该工件定位部分包括第一定位机构300和第二定位机构400,第一定位机构300包括第一调位模组310以及设于第一调位模组310上的第一定位治具320,第二定位机构400包括第二调位模组410以及设于第二调位模组410上的第二定位治具420。
具体来说,为保证加工精度,其中第一调位模组310和第二调位模组410均700用选用动态响应性能和定位精度高的直线电机模组,为便于方向说明,在图中建立X/Y/Z三维坐标系,第一调位模组310和第二调位模组410均沿Y轴方向设置。
该视觉定位系统于对位于工件定位部分的工件进行视觉定位。
该激光加工系统500用于对视觉定位后的工件进行激光加工。
该移料机构600用于将上下料部分的工件移动至工件定位部分进行视觉定位和激光加工,以及将加工完毕后的工件移回上下料部分。
在本发明实施例中,通过在上下料部分设置第一上下料机构100和第二上下料机构200,在工件定位部分设置第一定位机构300和第二定位机构400,在视觉定位系统700和激光加工系统500在对第一定位机构300上的工件进行视觉定位和激光加工时,移料机构600将第一上下料机构100上的工件移动至第二定位机构400,当第一定位机构300上的工件加工完毕后,激光加工系统500可对第二定位机构400上工件进行加工,同时移料机构600将第一定位机构300上加工后的工件移回原位置,再从第一定位机构300上取出一未加工的工件放置在第一定位机构300上,以此类推,当第一上下料机构100中的工件全部加工完毕之后,移料机构600再从第二上下料机构200中取出工件进行加工,此时工人可以更换第一上下料机构100上的产品,该设备在取放料和更换产品的过程中激光加工系统500无需停机,提高了激光加工系统500的利用率,提高了设备的加工效率。
在一种实施例中,如图2-3所示,第一上下料机构100和第二上下料机构200分别位于工件定位部分的两侧,第一上下料机构100包括第一移动模组110、设于第一移动模组110的第一滑板120以及设于第一滑板120的第一料盒130,第一容置位131形成在第一料盒130上,第二上下料机构200包括第二移动模组210、设于第二移动模组210的第二滑板220以及设于第二滑板220的第二料盒230,第二容置位231形成在第二料盒230上。
具体来说,第一上下料机构100和第二上下料机构200的结构相同,对称设置在工件定位部分的两侧。第一移动模组110和第二移动模组210可选用直线模组或直线电机,且均沿Z轴方向设置。第一滑板120和第二滑板220分别固定在第一移动模组110和第二移动模组210的移动件上,第一料盒130和第二料盒230分别能够在第一移动模组110和第二移动模组210的驱动下在Y轴方向移动,以移动至位于移料机构600的下方便于移料机构600取放料,以及移动至靠近工人处便于工人更换第一料盒130和第二料盒230。第一料盒130和第二料盒230分别可拆卸地设置在第一滑板120和第二滑板220上,以便于对第一料盒130和第二料盒230进行更换,第一容置位131和第二容置位231均为用于插设工件的插槽。
设备工作时,移料机构600先从其中一上下料组件(如第一上下料机构100)的料盒中取料进行加工,当该上下料组件的料盒中的工件全部加工完毕后再对另一上下料组件(第二上下料机构200)的料盒中的工件进行取料加工。当然,也可以从第一上下料机构100的第一料盒130中取出一个工件放置在第一定位治具320,在激光加工系统500对第一定位治具320上的工件进行加工的过程中,移料机构600从第二上下料机构200的第二料盒230中取出一个工件放置在第二定位治具420,当第一治具上的工件加工完毕后,激光加工系统500对第二定位治具420上的工件进行加工,同时,移料机构600将第一定位治具320上加工好的工件移回第一料盒130中,然后从第一料盒130中再取出一个未加工的工件放置在第一定位治具320上,以此类推,进行交互式加工,使得激光加工系统500不存在停歇时间,以此提高设备的加工效率。
在本发明实施例中,通过将第一上下料机构100和第二上下料机构200分别设于工件定位部分的两侧,便于工人更换料盒和便于移料机构600取料进行交互式加工,第一料盒130和第二料盒230分别设置在第一移动模组110和第二移动模组210的第一滑板120和第二滑板220上,第一料盒130和第二料盒230能够分别在第一移动模组110和第二移动模组210的驱动下移动,便于工人更换第一料盒130和第二料盒230以及便于移料机构600从第一料盒130和第二料盒230中取放工件。
在一种实施例中,如图1和图8所示,移料机构600位于工件定位部分的上方,移料机构600包括第一线性模组610、第二线性模组620、旋转气缸630和抓取组件,第二线性模组620与第一线性模组610组成十字型线性模组,抓取组件设于第二线性模组620的滑块621上,用于抓取工件。
具体来说,第一线性模组610和第二线性模组620均选用直线电机,直线电机结构简单,噪音小,动态响应性能和定位精度高,第一线性模组610和第二线性模组620分别沿X轴方向和Z轴方向设置。抓取组件有两组,分别设置在第二线性模组620的滑块621两侧下方,抓取组件包括旋转气缸630、摆臂640和吸盘650,旋转气缸630设于第二线性模组620的滑块621上,摆臂640设于旋转气缸630上,吸盘650设于摆臂640远离旋转气缸630的一端。第二线性模组620的滑块621上还设置有真空发生器、真空过滤器及电磁阀。
取料时,以移料机构600从第一料盒130中取料放置在第一定位治具320为例,第一线性模组610驱动第二线性模组620运动至第一料盒130上方,第二线性模组620驱动滑块621下降,当吸盘650接触第一料盒130内的工件后,真空发生器为吸盘650提供负压,使吸盘650吸附住工件,然后第二线性模组620驱动滑块621上升,将工件从第一料盒130中取出,此时吸盘650处于竖直状态,当滑块621上升到一定高度之后,电磁阀控制旋转气缸630动作,使吸盘650处于水平状态,便于放料,第一线性模组610驱动第二线性模组620移动至第一定位治具320上方,第二线性模组620驱动滑块621下降,吸盘650将工件放置在第一定位治具320上。当移料机构600将第一治具上加工完毕后的工件移回第一料盒130的过程与上述过程相反。
在一些实施例中,如图4所示,第一定位治具320安装在第一调位模组310的滑动板311上,第一定位治具320包括吸附治具321、限位部322、驱动件323以及推杆324,吸附治具321呈矩形,限位部322设于吸附治具321的一相邻两边,两驱动件323分别设于吸附治具321的另外两边,推杆324设置在驱动件323上,用于将位于吸附治具321的工件推至抵在与该驱动件323对应的限位部322。第二定位治具420和第一定位治具320结构相同。
具体来说,限位部322为限位板或限位柱,驱动件323为气缸,以第一定位治具定位工件为例,移料机构600将工件放置在第一定位治具的吸附治具321上后,其中一气缸通过推杆324将工件推至抵在与该气缸对应的限位部322,然后另一气缸通过推杆324将工件推至抵在与该气缸对应的限位部322,最后吸附治具321产生负压将工件吸附在治具表面。
在一种实施例中,如图2和图5-7所示,激光加工系统500包括第一运动模组510、相对于第一运动模组510固定设置的固定部分520以及设于第一运动模组510上的活动部分530,第一运动模组510位于工件定位部分的上方,固定部分520包括用于发射激光光束的激光器521和用于对激光光束进行引导的出射光路组件522,活动部分530包括第二运动模组531、激光切割头532以及将出射光路组件522射出的激光光束引导至激光切割头532的入射光路组件533,第二运动模组531和入射光路组件533均设于第一运动模组510的滑座511上,激光切割头532设于第二运动模组531的滑台5311上。
具体来说,第一运动模组510和第二运动模组531均选用直线电机,直线电机结构简单,噪音小,动态响应性能和定位精度高,能够保证激光切割头532的运动精度,进而保证激光加工质量,第一运动模组510和第二运动模组531分别沿X轴方向和Z轴方向设置,第二运动模组531设于第一运动模组510的滑座511上与第一运动模组510共同构成十字型运动模组。其中激光器521选用皮秒激光器。
包括激光器521的固定部分520相对于第一运动模组510固定设置,包括激光切割头532的活动部分530能够在第一运动模组510的驱动下在X轴方向移动,出射光路组件522与入射光路组件533构成飞行光路,以实现激光切割头532在X轴方向的自由运动。
激光切割头532能够在第二运动模组531的驱动下在Z轴方向运动,以靠近和远离工件定位部分,实现激光焦点的调节,激光切割头532能够在第一运动模组510的驱动下在X轴方向运动,配合由第一调位模组310驱动的第一定位治具和第二调位模组410驱动的第二定位治具420实现对第一定位治具和第二定位治具420上的工件进行激光加工。激光切割头532在第一运动模组510的驱动下实现工位的切换,在加工完第一定位治具上的工件后在第一运动模组510的驱动下运动至第二定位治具420的上方对第二定位治具420上的工件进行加工。
进一步地,出射光路组件522包括沿激光光束的光路依次设置的扩束镜5221、第一反射镜片5222、第二反射镜片5223和出光管5224,激光器521发射的激光光束经第一反射镜片5222和第二反射镜片5223反射后从出光管5224射出,扩束镜5221设于激光器521与第一反射镜片5222之间,用于改变激光光束直径和发散角,起到准直光束的作用。
更进一步地,入射光路组件533包括沿激光光束的光路依次设置的入光管5331、第三反射镜片5332和第四反射镜片5333,入光管5331与出光管5224同轴设置,射入入光管5331的激光光束依次经第三反射镜片5332和第四反射镜片5333反射后进入激光切割头532。
在一种具体的实施例中,如图1和图5所示,视觉定位系统700设于第二运动模组531的滑台5311上,与激光切割头532一同运动,以第一定位机构300为例,当工件在第一定位治具上定位后,配合第二运动模组531和第一调位模组310的共同作用,将第一定位治具上工件移动至视觉定位系统700的CCD相机下方,CCD相机对工件上的Mark点进行捕捉,通过软件计算得出工件的坐标中心点,工艺人员在加工软件里面事先作出激光加工路径,设定一加工坐标系中心点,通过软件系统对两个坐标中心进行关联,配合运动控制卡对激光进行出光控制,然后软件控制激光切割头532沿设定的加工路径进行扫描加工。
在一种实施例中,如图1所示,激光加工设备还包括下机柜800、设备主体900和上罩组件1000,设备主体900设于下机柜800上,上下料部分、工件定位部分、视觉定位系统700、激光加工系统500以及移料机构600均设于设备主体900上,上罩组件1000设于下机柜800的上方,并罩设在设备主体900、上下料部分、工件定位部分、视觉定位系统700、激光加工系统500以及移料机构600的外侧。
进一步地,设备主体900包括设于下机柜800的上方的底座910、设于底座910的立柱920以及设于立柱920的横梁930,上下料部分和工件定位部分均设于底座910,激光加工系统500、视觉定位系统700和移料机构600均设于横梁930。下机柜800的内部设有控制器(图中未示出),控制器与上下料部分、工件定位部分、视觉定位系统700、激光加工系统500以及移料机构600电性连接,上罩组件1000上包括罩体1010以及设于罩体1010的外侧并与控制器电性连接的报警灯1020、显示器1030以及操作面板1040。
具体来说,底座910、立柱920和横梁930均为大理石材质,横梁930沿X轴方向设置,立柱920和横梁930构成龙门结构,激光加工系统500的固定部分520和第一运动模组510均固定在横梁930上,移料机构600的第一线性模组610通过固定座601安装在立柱920上。
罩体1010和下机柜800由型材标准角码连接牢固,罩体1010是标准型材与自制钣金件组成,简化了罩体1010的组装与加工。罩体1010上设有操作门,操作门通过滑动的方式开启和关闭,可以打开操作门进行上下料操作,操作门上还设置透明窗,使得操作人员无需打开操作门即可对激光加工过程进行观察,透明窗为防辐射玻璃,有效保证人员操作安全。控制器对整个设备起到控制作用,可通过工控机实现,显示器1030支持触控,满足技术人员对机台的参数编辑、工艺调试,以及运行状态监控。操作面板1040是该设备电气控制的操作位置,上面设置有电源、复位、急停启动按钮和USB接口等,操作人员由此开关机。报警灯1020具备声光报警,提供本激光加工设备的运行态监控功能。
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 用于激光加工工件的加工设备、用于激光加工工件的加工设备的成套零件以及用于使用这种加工设备激光加工工件的方法
- 激光加工设备、激光加工方法和设置激光加工设备的方法