一种用于加油机器人的移动平台及加油机器人
文献发布时间:2023-06-19 11:34:14
技术领域
本发明涉及机器人加油领域,具体为一种用于加油机器人的移动平台及加油机器人。
背景技术
传统的加油方式主要以人工服务为主,其人力成本较高、智能化水平较低。随着技术的进步,现有技术也开发出了一些半自助加油的加油系统和加油方法,但是采用半自助的加油方式需要客户下车后自己操作,一方面导致其客户的加油体验较差,另一方面加油效率也较低下。
公布号为CN112299359A的中国发明专利申请公开了一种具有双臂结构的全自动加油机器人,通过设置两个机械臂,其中一个机械臂上设置有油箱盖启闭装置,用于油箱盖的打开;另一个机械臂上设置有加油装置,用于加油,来实现车辆加油的全自动化。上述专利设置了三轴移动装置,其包括设置在底座上通过横向移动电机实现横向移动的行走架、设置在行走架上通过升降电机实现上下移动的升降座、设置在升降座上通过前后移动电机实现前后移动的前后移动台,这种三轴移动装置的结构较为复杂,装置的占用空间较大,使用起来较为不便。因此,有必要对现有的三轴移动装置的结构进行技术改进,以简化其结构,提高其使用的灵活性,以及减小其占用的空间。
发明内容
本发明的目的是提出一种用于加油机器人的移动平台及加油机器人,通过设置连杆机构同时满足了机械臂工作台在y轴和z轴上的移动,配合支撑架在x轴上的移动,实现了三自由度的移动;连杆机构能够在y轴上进行伸缩,使得移动平台在y轴方向上占用的空间减少,解决了背景技术中提出的问题。
为实现上述目的,本发明一方面提供了一种用于加油机器人的移动平台,包括支撑架和机械臂工作台,所述支撑架沿x轴移动,所述支撑架的一侧上下设置两个连杆机构,所述连杆机构的两端分别与所述支撑架和所述机械臂工作台转动连接,所述连杆机构带动所述机械臂工作台在y轴和z轴上移动。
进一步地,所述连杆机构包括第一连杆和第二连杆,所述第一连杆的一端与所述支撑架转动连接,所述第一连杆的另一端与所述第二连杆的一端转动连接,所述第二连杆的另一端与所述机械臂工作台转动连接。
进一步地,所述第一连杆与所述第二连杆的连接处为弯折处,两个所述连杆机构的所述弯折处相对向内弯折,能够减小连杆机构的占用空间。本领域技术人员可根据需要设置上下两个连杆机构的间距,以防止其相互碰撞。
进一步地,所述连杆机构与所述支撑架的连接处设置有驱动装置,所述驱动装置驱动所述连杆机构转动,使得所述机械臂工作台在y轴和z轴上移动。所述连杆机构只需要在其一端设置驱动装置即可满足使用要求,较佳地,在支撑架与连杆机构的连接处设置驱动装置,将所述驱动装置和驱动支撑架沿x轴移动的支撑架驱动装置集成设置在支撑架内,便于统一管理。当然地,本领域技术人员可以根据需要设置用于驱动连杆机构转动的驱动装置的位置,例如在连杆机构与机械臂工作台的连接处设置所述驱动装置。
进一步地,所述连杆机构与所述支撑架的连接处设置有驱动装置,且所述连杆机构与所述机械臂工作台的连接处设置有驱动装置,所述驱动装置驱动所述连杆机构转动,使得所述机械臂工作台在y轴和z轴上移动。
进一步地,所述机械臂工作台上设置有机械臂。
进一步地,所述机械臂工作台上设置有视觉识别装置。
本发明另一方面提供了一种加油机器人,包括上述用于加油机器人的移动平台。
与现有技术相比,本发明的有益效果是:
(1)本发明结构简单,使用灵活,通过设置连杆机构同时满足了机械臂工作台在y轴和z轴上的移动,配合支撑架在x轴上的移动,实现了三自由度的移动;
(2)连杆机构能够在y轴上进行伸缩,使得移动平台在y轴方向上占用的空间减少;
(3)上下设置两个连杆机构能够让机械臂工作台在移动过程中保持平衡。
(4)通过控制连杆机构的转动角度,使得位于上方的连杆机构的第一连杆与位于下方的连杆机构的第二连杆保持平行,且位于上方的连杆机构的第二连杆与位于下方的连杆机构的第一连杆保持平行,使得机械臂工作台始终保持与支撑架平行,实现了机械臂工作台始终位于竖直位置,能够保证工作的稳定性。
附图说明
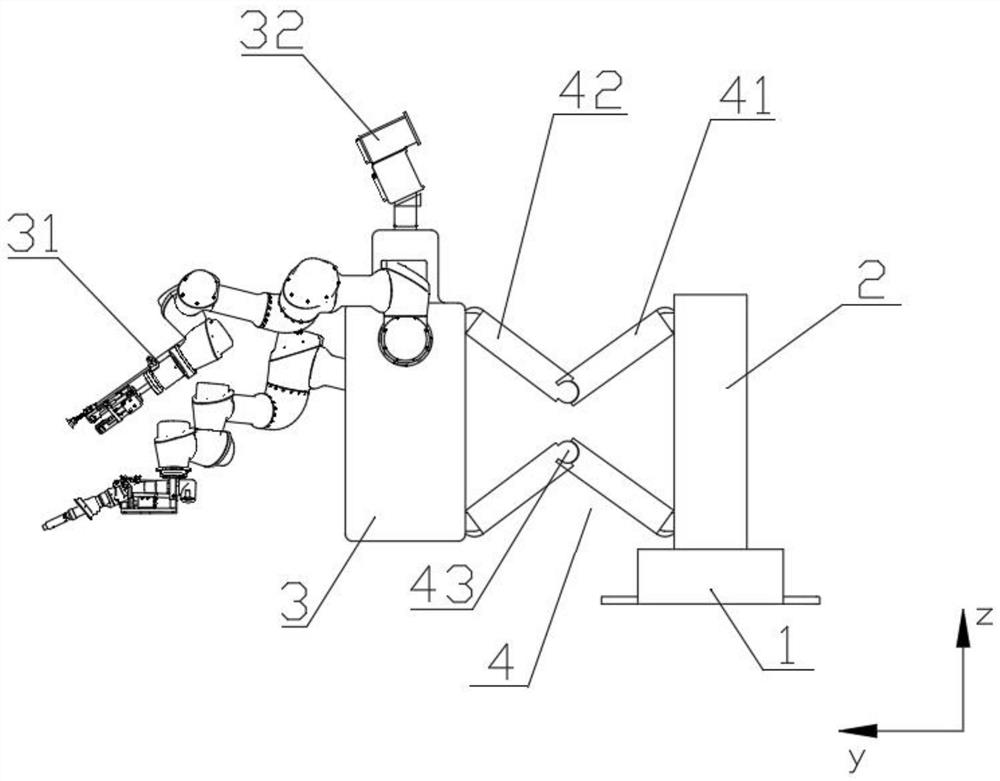
图1为本发明的用于加油机器人的移动平台的正视图;
图2为本发明的用于加油机器人的移动平台的俯视图。
图中:1、底座;2、支撑架;3、机械臂工作台;31、机械臂;32、视觉识别装置;4、连杆机构;41、第一连杆;42、第二连杆;43、弯折处。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。下面对具体实施方式的描述仅仅是示范性的,应当理解,此处所描述的具体实施仅仅用以解释本发明,而绝不是对本发明及其应用或用法的限制。
需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。相反,当元件被称作“直接在”另一元件“上”时,不存在中间元件。相反,当元件被称作“直接”与另一元件连接时,不存在中间元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
在本发明的描述中,需要理解的是,术语“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
图1示出了本实施例的用于加油机器人的移动平台的结构示意图,包括底座1和机械臂工作台3,底座1上设置有支撑架2,支撑架2通过丝杠等驱动装置在x轴上移动,机械臂工作台3上设置有机械臂31和视觉识别装置32。
如图1所示,支撑架2朝向y轴方向上的一侧上下设置两个连杆机构4,连杆机构4的两端分别与支撑架2和机械臂工作台3转动连接,连杆机构4带动机械臂工作台3在y轴和z轴上移动。具体地,连杆机构4包括第一连杆41和第二连杆42,第一连杆41的一端与支撑架2转动连接,第一连杆41的另一端与第二连杆42的一端转动连接,第二连杆42的另一端与机械臂工作台3转动连接。
第一连杆41与第二连杆42的连接处为弯折处43,两个连杆机构4的弯折处43相对向内弯折,能够减小连杆机构4的占用空间。当然地,在其他实施例中,弯折处43也可以相对向外弯折。
连杆机构4只需要在其一端设置驱动装置即可满足使用要求,较佳地,在支撑架2与连杆机构4的连接处设置驱动装置,将上述驱动装置和驱动支撑架2沿x轴移动的支撑架2驱动装置集成设置在支撑架2内,便于统一管理。当然地,本领域技术人员可以根据需要设置用于驱动连杆机构4转动的驱动装置的位置,例如在连杆机构4与机械臂工作台3的连接处设置驱动装置。
在一较佳地实施例中,连杆机构4的两端均设置有驱动装置,通过驱动装置调节连杆机构4的转动角度,使得位于上方的连杆机构4的第一连杆31与位于下方的连杆机构4的第二连杆42保持平行,且位于上方的连杆机构4的第二连杆42与位于下方的连杆机构4的第一连杆41保持平行,使得机械臂工作台3始终保持与支撑架2平行,实现了机械臂工作台3始终位于竖直位置,能够保证工作的稳定性。例如,位于上方的连杆机构4的第一连杆31顺时针转动预设角度,此时控制位于下方的连杆机构4的第二连杆32顺时针转动,即可实现机械臂工作台3向上运动,且机械臂工作台3保持与支撑架2平行。
在机械臂工作台3不使用时,连杆机构4处于收缩状态,上下两个连杆机构4相对向内弯折并沿y轴方向收缩至支撑架2附近,此时整个移动平台的占用空间较小。当机械臂工作台3需要进行加油时,支撑架2沿x轴移动至目标位置,驱动装置驱动连杆机构4转动,第一连杆41通过第二连杆42带动机械臂工作台3在y轴和z轴上移动至目标位置,设置在机械臂工作台3上的机械臂31开始工作,在此过程中,上下两个连杆机构4分别对机械臂工作台3的上部和下部进行支撑,能够让机械臂工作台3在移动过程中保持平衡。
本实施例还提供了一种加油机器人,包括上述用于加油机器人的移动平台。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种用于加油机器人的移动平台及加油机器人
- 一种用于加油站的加油机器人及自动加油的操控方法