一种智能拖地机器人
文献发布时间:2023-06-19 11:44:10
技术领域
本发明涉及智能家居技术领域,具体涉及一种智能拖地机器人。
背景技术
随着科技的发展,越来越多的家庭采用了智能机器人来辅助人们的清洁作业。在现有技术中,智能清洁机器人的结构大同小异,多是在产品底部放置一块平铺的拖布,利用内部的控制器来控制智能机器人的活动轨迹,以此来完成拖地作业。
但是,现有的拖地机器人通常都是在拖地一段时间后,再将拖布拆卸下来对其进行清洗,从而减少了有效清洁时间,降低了清洁效率。
发明内容
针对现有技术中的缺陷,本发明的目的是提供一种智能拖地机器人,以提高清洁效率。
为了实现上述目的,本发明提供一种智能拖地机器人,包括机体,所述机体上设置有滚轮和用于驱动所述滚轮转动的第一驱动装置,还包括:
拖地单元,所述拖地单元安装在所述机体上,所述拖地单元包括:
辊轮轴,两个所述辊轮轴相对平行设置在所述机体上并与所述机体转动连接;
辊轮,两个所述辊轮分别同轴套设在两个所述辊轮轴上并与两个所述辊轮轴固定连接;
环形拖布,所述环形拖布套设在两个所述辊轮上;以及
第二驱动装置,所述第二驱动装置设置在所述机体上,所述第二驱动装置用于驱动所述辊轮轴转动;以及
清洗单元,所述清洗单元设置在所述机体上,所述清洗单元用于对所述环形拖布进行清洗,所述清洗单元包括:
清洗槽,所述清洗槽设置在两个所述辊轮之间,且所述环形拖布的上侧部分具有通过导向轮导入所述清洗槽内的清洗段;
清洗刷,多个所述清洗刷沿纵向依次间隔设置在所述清洗槽内,且所述清洗刷与所述环形拖布的所述清洗段的外侧抵触;
污水槽,所述污水槽设置在所述清洗槽的后侧;
挤压辊,两个所述挤压辊相对设置在所述污水槽的顶部,且所述环形拖布从两个所述挤压辊之间穿过;以及
第三驱动装置,所述第三驱动装置用于驱动所述清洗刷转动,且所述清洗刷的转动方向与所述环形拖布的传动方向相反。
进一步地,还包括集污槽,所述集污槽的侧壁开设有若干第一过滤孔,所述集污槽固定设置在所述清洗槽内,所述环形拖布的所述清洗段的靠近所述清洗刷的一侧穿过所述集污槽。
进一步地,所述集污槽的底部的一侧设置有安装孔,所述去污槽通过所述安装孔与所述集污槽可拆卸连接,所述去污槽的侧壁设置有若干第二过滤孔。
进一步地,所述集污槽的底部设置为倾斜的斜面,所述安装孔开设在斜面的较低端。
进一步地,还包括:
补水壶,所述补水壶固定设置在所述机架上,且所述补水壶通过水泵和第一管道与所述清洗槽连通,所述第一管道上设置有第一电磁阀;以及
液位传感器,两个所述液位传感器沿纵向相对设置在所述清洗槽内,其中一个所述液位传感器位于所述出水口的上方,另一个所述液位传感器位于多个所述清洗刷中的位于最高处的所述清洗刷和位于最低处的所述清洗刷之间。
进一步地,还包括漂浮物清理装置,所述漂浮物清理装置包括设置有吹气孔的吹气件,所述吹气件横向设置在所述集污槽的顶部的一侧,所述吹气孔面向所述集污槽的另一侧并倾斜向下,所述清洗槽的背离所述吹气件的一侧设置有出水口,所述出水口位于所述集污槽内,且所述出水口的底部略低于位于较高处的所述液位传感器,所述出水口的下方设置有接污槽。
进一步地,所述清洗槽和所述污水槽的数量为多个,多个所述清洗槽和多个所述污水槽依次交替间隔设置,所述集污槽设置在位于最前侧的所述清洗槽内。
本发明的有益效果:
本发明所提供的智能拖地机器人,通过设置清洗单元,使得在拖地的过程中即可自行完成对于环形拖布的清洗,从而提高了清洁效率。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
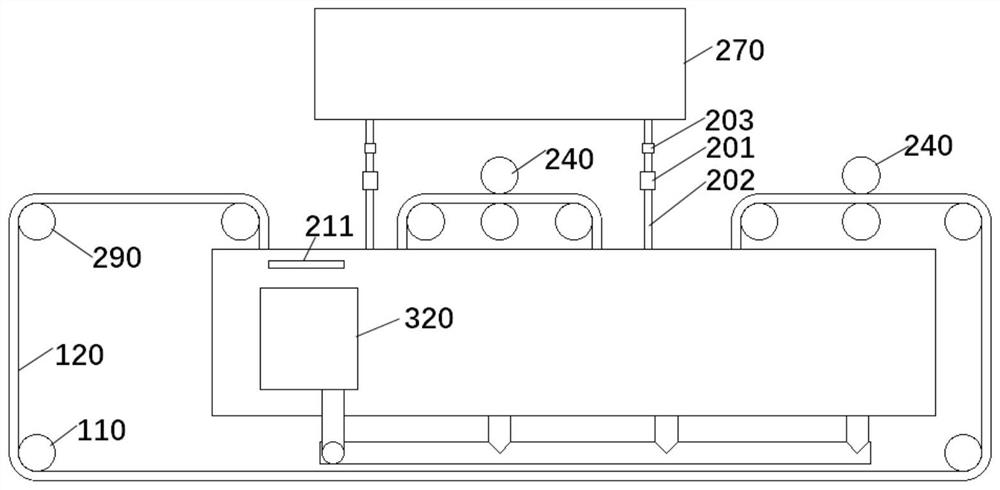
图1为本发明一实施例提供的智能拖地机器人的结构视图;
图2为图1所示的剖视图;
图3为图2所示的A处的放大视图。
附图标记:
110-辊轮、120-环形拖布、210-清洗槽、211-出水口、220-清洗刷、230-污水槽、240-挤压辊、250-集污槽、260-去污槽、270-补水壶、280-液位传感器、290-导向轮、310-吹气件、311-吹气孔、320-接污槽、201-水泵、202-第一管道、203-第一电磁阀。
具体实施方式
下面将结合附图对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本发明的保护范围。
需要注意的是,除非另有说明,本申请使用的技术术语或者科学术语应当为本发明所属领域技术人员所理解的通常意义。
在本申请的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。在本发明的描述中,“多个”的含义是两个以上,除非另有明确具体的限定。
在本申请中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本申请中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
如图1-3所示,本发明提供一种智能拖地机器人,包括机体,机体上设置有滚轮和用于驱动滚轮转动的第一驱动装置。当然机体上还安装有控制器用以控制拖地机器人的工作,这些都是现有技术,在此就不做过多赘述,且在附图中也未示出。
上述拖地机器人还包括拖地单元和清洗单元。
其中,拖地单元安装在机体上,拖地单元包括辊轮轴、辊轮110、环形拖布120和第二驱动装置。
辊轮轴的数量为两个,这两个辊轮轴相对平行安装在机体上并与机体转动连接。具体地,沿横向平行安装在机体上。
辊轮110的数量为两个,两个辊轮110分别同轴套设在两个辊轮轴上并与两个辊轮轴固定连接。
环形拖布120套设在两个辊轮110上。这样就形成一个类似于传送带的结构,使得驱动辊轮轴转动的时候,环形拖布120会跟着一个转动,以便于清洗。具体地,环形拖布120包括基层和清洁层,基层由橡胶或帆布制成,清洁层由超细纤维制成,清洁层粘结在基层上。
第二驱动装置固定安装在机体上,第二驱动装置用于驱动辊轮轴转动。当然,环形拖布120的转动方向与拖地机器人的形式方向相反。
清洗单元固定安装在机体上,清洗单元用于对环形拖布120进行清洗,清洗单元包括清洗槽210、清洗刷220、污水槽230、挤压辊240和第三驱动装置。
其中,清洗槽210固定安装在两个辊轮110之间并位于环形拖布120的内侧,且环形拖布120的上侧部分具有通过导向轮290导入清洗槽210内的清洗段。这样在环形拖布120转动的过程中,在导向轮的作用下,就会依次进入清洗槽210进行清洗。
清洗刷220的数量为多个,这多个清洗刷220沿纵向依次间隔安装在清洗槽210内并与清洗槽210转动连接,且清洗刷220与环形拖布120的清洗段的外侧抵触。具体地,清洗刷220包括转轴和清洗杆,若干清洗杆安装在转轴的外周面上,也就是说类似于卷发梳一样的结构,清洗杆的远离转轴的一端与环形拖布120抵触。这样在清洗刷220转动的过程中,在清洗杆的作用下,将粘附在环形拖布120上的垃圾清理下来。
污水槽230固定安装在清洗槽210的后侧,用于接住从环形拖布120上挤压出来的污水。
两个挤压辊240相对设置在污水槽230的顶部,且环形拖布120从两个挤压辊240之间穿过。这样被清洗过的环形拖布120从两个挤压辊240之间穿过,在挤压辊240的作用下,挤压掉上面的污水,污水在重力的作用下掉落在污水槽230内。
第三驱动装置用于驱动清洗刷220转动,且清洗刷220的转动方向与环形拖布120的传动方向相反。
在一个实施例中,还包括集污槽250,集污槽250的侧壁开设有若干第一过滤孔,用于过滤从环形拖布120上清洗下来的废弃物,以免废弃物落入清洗槽210内,缠绕在导向轮上或进入导向轮与清洗槽210的缝隙中影响导向轮的运转,同时避免废弃物遍布整个清洗槽210,影响对于环形拖布120的清洗。集污槽250固定安装在清洗槽210内,集污槽250上开设有若干第一过滤孔,环形拖布120的清洗段的靠近清洗刷220的一侧穿过集污槽250。具体地,集污槽250的底部开设有通孔,通孔与环形拖布120的厚度相适应,环形拖布120穿过该通孔。
这样在清洗的过程中,环形拖布120上的废弃物被清洗下来,在集污槽250的作用下,废弃物被拦截在集污槽250内,从而不会遍布整个清洗槽210。被清洗过的环形拖布120,从集污槽250外出清洗槽210。因此,不会重新沾上之前清洗下来的废弃物,从而提高清洗效果,与此同时,集污槽250还可以避免废弃物落入清洗槽210内,缠绕在导向轮上或进入导向轮与清洗槽210的缝隙中影响导向轮的运转。
此结构提高了清洗效果。
在一个实施例中,还包括去污槽260,集污槽250的底部的一侧开设有安装孔,去污槽260通过安装孔与集污槽250可拆卸连接,去污槽260的侧壁设置有若干第二过滤孔。具体地,第二过滤孔的孔径小于等于第一过滤孔的孔径。
这样在清理请集污槽250时,只需将集污槽250内的废弃物导入去污槽260内,然后取出去污槽260即可对其进行清理。具体地,首先放掉清洗槽210内的清洗液,然后将集污槽250内的废弃物冲入去污槽260内,取出去污槽260即可。
此结构便于清理集污槽250内的废弃物。
在一个实施例中,集污槽250的底部设置为倾斜的斜面,安装孔开设在斜面的较低端。
此结构有助于清理集污槽250内的废弃物。
在一个实施例中,还包括补水壶270和液位传感器280。
其中,补水壶270固定安装在机架上,且补水壶270通过水泵201和第一管道202与清洗槽210连通,第一管道202上还安装有第一电磁阀203。补水壶270用于向清洗槽210内补充清洗液。
液位传感器280的数量为两个,两个液位传感器280沿纵向安装在清洗槽210内,其中一个液位传感器280位于多个清洗刷220中的位于最高处的清洗刷220的上方,另一个液位传感器280位于多个清洗刷220中的位于最高处的清洗刷220和位于最低处的清洗刷220之间。
因为,在清洗的过程中,清洗槽210内的清洗液会被环形拖布120带走,从而使得清洗槽210内的清洗液随着清洗的进行越来越少,当液位下降至使得所有清洗刷220均露出液面时,便不再具有清洗效果。
因此,通过补水壶270和液位传感器280,清洗槽210内的液面下降至位于较低位置的液位传感器280处时,补水壶270向清洗槽210内添加清洗液,当液位上升至位于较高位置的液位传感器280处时,补水壶270停止向清洗槽210内添加清洗液。
此结构,可以保证清洗槽210内的液位不会下降至使得所有清洗刷220均露出液面的位置,从而保证了清洗效果。
在一个实施例中,还包括漂浮物清理装置,漂浮物清理装置包括开设有吹气孔311的吹气件310,吹气件310横向安装在集污槽的顶部的一侧,吹气孔311面向集污槽的另一侧并倾斜向下,清洗槽的背离吹气件的一侧开设有出水口211,出水口位于集污槽内,且出水口的底部略低于位于较高处的一个液位传感器,出水口的下方安装有接污槽320。当然吹气件通过第三管道与吹风机连通。
这样在使用时,打开吹风机,吹气件就会向水面吹风,从而将漂浮在水面上的废弃物吹向集污槽的另一侧。当向清洗槽补水时,因为出水口略低于位于较高处的液位传感器,因此,漂浮在水面上的废弃物就会通过出水口流进接污槽320,从而将集污槽内的漂浮物清理掉,如此就可以降低更换清洗槽内的水的频率。
此结构,有助于清理掉集污槽内的漂浮物。
在一个实施例中,清洗槽210和污水槽230的数量相等且均为多个,多个清洗槽210和多个污水槽230依次间隔设置。经过多级清洗,从而提高清洗效果,进而提高清洁效果。
当然,为了清理清洗槽、污水槽和接污槽,清洗槽、污水槽和接污槽的底部均设置有排水孔,排水孔通过第二管道与外界连通,该管道上安装有第二电磁阀,以便于排出清洗槽和污水槽内的脏水。
本发明的工作原理如下:
使用时,在拖地的过程中,第二驱动装置驱动环形拖布120转动,当然环形拖布120的转动方向与拖地机器人的形式方向相反。第三驱动装置驱动清洗刷220转动。拖过地面的环形拖布120依次进入清洗槽210内,在清洗刷220的作用下,将环形拖布120清洗干净。
本发明所提供的拖地机器人,在拖地的过程中即可完成对于环形拖布120的清洗从而提高了拖地效率。
本发明的说明书中,说明了大量具体细节。然而,能够理解,本发明的实施例可以在没有这些具体细节的情况下实践。在一些实例中,并未详细示出公知的方法、结构和技术,以便不模糊对本说明书的理解。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
- 智能机器人的拖地方法和芯片及拖地机器人
- 一种机器人仿人工拖地方法和芯片及智能拖地机