一种电动汽车遥控装置
文献发布时间:2023-06-19 11:47:31
技术领域
本发明涉及一种电动汽车遥控装置,属于新能源汽车技术领域
背景技术
目前电动汽车领域已经实现L3级别的自动驾驶技术落地,业界预计L4乃至L5级别全自动驾驶将在数年内实现。L5全自动驾驶实现以后,汽车将不止于交通工具,可以集成许多功能,变成一台行走的机器人、移动的超级电脑。但在非标准的道路上或者无路的野外,在可以预见的十年甚至几十年以内仍将离不开人工接管。
传统驾驶方式,驾驶技术由生疏到熟练,需要比较长时间感官的训练,尤其是手和脚的动作协调,熟悉和协调过程中,对新手而言存在许多人为的失误,对熟手而言,也存在疲劳驾驶的风险。对于以极快的百公里加速作为卖点的电动汽车而言,有超跑的提速感,加速极快但又没有超跑的那种训练有素的门槛、比较强的稳定架构和制动能力,当这种加速怪物在公共道路普遍应用,车速极易提升,遇到复杂路段或紧急情况,想要快速停止下来却又非常困难,这必然隐含巨大的安全风险,并且已经出现越来越多的与之相关的事故。
而且,当前的电动汽车还存在其它诸多缺陷,从燃油车体系过渡而来的操控系统存在多种方案,有些方案在紧急情况下容易发生误操作,由此带来的安全隐患也不可小视。
发明内容
本发明的目的是为了解决在L4-L5自动驾驶技术条件下,针对非标道路提出一种电动汽车遥控装置,一种电动汽车在特定条件下的人工接管操控方案,具有简明、易用、轻松操控、安全等特点。
为了实现上述目的,本发明采用了以下技术方案:
一种电动汽车遥控装置,包括:主机盘,底框架,开关键,转向灯拨杆,速度调节旋钮,急停键,其中的主机盘与底框架构成前轮转向机构。
所述主机盘包括:主机,主显示屏,副显示屏,home键及车标位,触感垫,主机转轴橡胶件,导轨,导轨固定件,位移感应器,方向指示,正向线,音响,前摄像头,后摄像头。其中主机包含主板、存储、芯片、感应装置、信号装置、电池、电源管理等电子部件。
所述的底框架包括:底框架骨架,底框架转轴橡胶件,轴承,导轨橡胶件,硅胶构造件,托手垫,支撑固定位。
所述的主机盘所安装的系统和app软件与电动汽车的驾驶系统通过无线通信方式联网,主机盘与底框架构成的前轮转向机构、转向灯拨杆、速度调节旋钮和急停键均为物理键,这些物理键通过独立的无线信号与电动汽车的驾驶系统通讯,物理键的无线信号优先于app软件联网信号。
所述的前轮转向机构,主机盘安装在底框架上面,人工操控车辆时,双手托住底框架或者把底框架支撑固定,手指搓动主机盘,主机盘相对底框架的转向角度就是车辆前轮的转向角度。
进一步的,主机盘能够相对底框架旋转任意角度。
所述转向灯拨杆包含回正线、拨杆、右转指示、左转指示。当主机盘中的位移传感器感知到主机盘相对底框架的位移方向反转,此时车辆前轮方向开始回正的同时发出回正信号给拨杆,拨杆自动归位对正回正线。
所述的速度调节旋钮包含对格线、速度线、速度值。对格线固定不动,速度线与速度值是一起被拨动的,速度线分成多个刻度,每个刻度对应速度值相应的速度。拨至指定速度给出指令信号,车辆按指定速度行驶,速度范围从负值到零到正值,拨动速度调节旋钮至速度值为负值时能够倒车,拨动速度调节旋钮至速度值为零时可以正常停车,也可以快速拨动速度调节旋钮至速度值为零实施紧急停车。
进一步的,所述的速度调节旋钮的速度调节为无级调速方式,速度线的每一个刻度均可定格在与对格线的对齐位置,拨动半个刻度调速有效但难以定格,对齐定格后可离手,离手后速度调节旋钮保持定格状态,车辆仍继续按速度线与对格线定格的速度值所对应的速度运行。
进一步的,在对格线对正到速度线与速度值的零值时,车辆已经停止或者正在停车,此时,向上拨动意味着给出倒车的信号,向下拨动意味着给出向前行驶的信号,速度线与速度值的零值附近有1/4~1/2个刻度的零速过渡。
所述急停键与遥控装置其它功能部件分立,能够最高优先级给车辆驾驶系统发送紧急信号,在按下急停键之后,能够在动能回收系统之外立即启动机械制动。
进一步的,物理键的所有功能均能够在app软件上实现,但信号优先级在物理键之下。
优选的,遥控车速最大不超过60-80公里/小时。
优选的,遥控器直径380mm,中间最薄处厚度12-16mm,最厚处厚度36-48mm。
可选的,mini版遥控器直径238mm,中间最薄处厚度9-12mm,最厚处厚度24-32mm。
优选的,遥控器电池采用无线充电。
与现有技术相比,本发明的有益效果在于:
1、本方案所述的电动汽车遥控装置集传统的方向盘、加速踏板、刹车踏板、档位和中控屏于一体,具有简明、易用的特征。
2、本方案所述的主机盘相对底框架的转向角度就是车辆前轮的转向角度,操控上足够直观准确。
3、本方案仅以速度调节旋钮代替了传统的油门和刹车以及倒档,拨至指定速度给出指令信号,车辆按指定速度行驶,即可正常行驶,也可以零速停车、负速度倒车。同时速度标识简明清晰,操控精确,可大大减少行车速度的操作人为失误,即使是新手司机,也可以轻易控制好行车速度,基本可以杜绝非故意超速的可能性。
4、所述急停键与遥控装置其它功能部件分立,优先给车辆驾驶系统发送紧急信号,在按下急停键之后,能够在动能回收系统之外立即启动机械制动,因此可以消减系统误判带来的安全风险,可以大大提高行车安全和道路安全。
附图说明
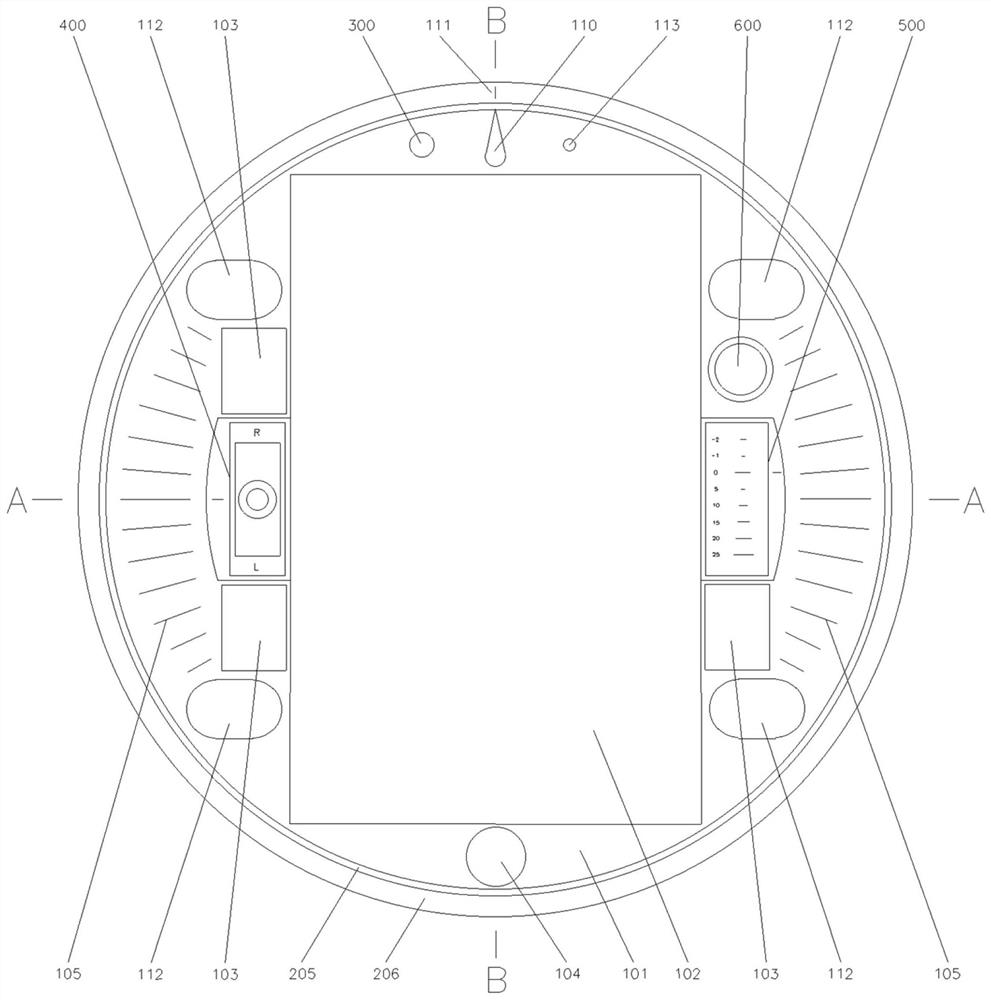
图1为本发明提出的电动汽车遥控装置俯视结构示意图
图2为图1中的转向灯拨杆400放大图
图3为图1中的速度调节旋钮500放大图
图4为图1中的A-A剖面结构示意图
图5为图4中的C标注部分放大图
图6为图4中的D标注部分放大图
图7为图4中的E标注部分放大图
图8为图1中的B-B剖面结构示意图
图9为本发明提出的主机盘100之A-A剖面结构示意图
图10为本发明提出的主机盘100之A-A剖面骨架结构示意图
图11为本发明提出的底框架200之A-A剖面结构示意图
图12为本发明提出的底框架200之A-A剖面骨架结构示意图
图13为本发明提出的主机盘100仰视结构示意图
图14为本发明提出的体现导轨的主机盘100仰视结构示意图
图15为图14中的F标注部分立面示意放大图
图16为本发明提出的导轨示意图
图17为本发明提出的导轨拆分结构示意图
图18为本发明提出的底框架200俯视结构示意图
图19为本发明提出的体现导轨和位移感应器的底框架200俯视结构示意图
图20为本发明提出的电动汽车遥控装置仰视结构示意图
图中:100、主机盘;101、主机;102、主显示屏;103、副显示屏;104、home键及车标位;105、触感垫;106、主机转轴橡胶件;107、导轨;108、导轨固定件;109、位移感应器;110、方向指示;111、正向线;112、音响;113、前摄像头;114、后摄像头;200、底框架;201、底框架骨架;202、底框架转轴橡胶件;203、轴承;204、导轨橡胶件;205、硅胶构造件;206、托手垫;207、支撑固定位;300、开关键;400、转向灯拨杆;401、回正线;402、拨杆;403、右转指示;404、左转指示;500、速度调节旋钮;501、对格线;502、速度线;503、速度值;600、急停键。
具体实施方式
下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“高度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
除非别作定义,此处使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本发明专利说明书以及权利要求书中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,“一个”或者“一”等类似词语也不表示数量限制,而是表示存在至少一个。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
需要说明的是,对于对称结构的部件,以及在详图或其它图示中标注过的部件,未作全部标注,仅是为了便于简化描述。
参照图1-20,一种电动汽车遥控装置,包括:主机盘100,底框架200,开关键300,转向灯拨杆400,速度调节旋钮500,急停键600,其中的主机盘100与底框架200构成前轮转向机构。
所述主机盘100包括:主机101,主显示屏102,副显示屏103,home键及车标位104,触感垫105,主机转轴橡胶件106,导轨107,导轨固定件108,位移感应器109,方向指示110,正向线111,音响112,前摄像头113,后摄像头114。其中主机101包含主板、存储、芯片、感应装置、信号装置、电池、电源管理等电子部件。
所述的底框架200包括:底框架骨架201,底框架转轴橡胶件202,轴承203,导轨橡胶件204,硅胶构造件205,托手垫206,支撑固定位207。
所述的主机盘100所安装的系统和app软件与电动汽车的驾驶系统通过无线通信方式联网,主机盘100与底框架200构成的前轮转向指挥机构、转向灯拨杆400、速度调节旋钮500和急停键600均为物理键,这些物理键通过独立的无线信号与电动汽车的驾驶系统通讯,物理键的无线信号优先于app软件联网信号。
所述的前轮转向机构,主机盘100安装在底框架200上面,人工操控车辆时,双手托住底框架200或者把底框架200支撑固定,手指搓动主机盘100,主机盘100相对底框架200的转向角度就是车辆前轮的转向角度,主机盘100能够相对底框架200旋转任意角度。
所述转向灯拨杆400包含回正线401、拨杆402、右转指示403、左转指示404。当主机盘100中的位移传感器109感知到主机盘100相对底框架200的位移方向反转,车辆前轮方向开始回正的同时发出回正信号给拨杆402,拨杆402自动归位对正回正线401。
所述的速度调节旋钮500包含对格线501、速度线502、速度值503。对格线501固定不动,速度线502与速度值503是一起被拨动的,速度线502分成多个刻度,每个刻度对应速度值503相应的速度。拨动速度调节旋钮500至指定速度给出指令信号,车辆按指定速度行驶,速度范围从负值到零到正值,拨动速度调节旋钮500至速度值503为负值时能够倒车,拨动速度调节旋钮500至速度值503为零时可以正常停车,也可以快速拨动速度调节旋钮500至速度值503为零实施紧急停车。
进一步的,速度调节旋钮500的速度调节为无级调速方式,但速度线502的每一个刻度均可定格在与对格线501的对齐位置,拨动半个刻度调速有效但难以定格,对齐定格后可离手,离手后速度调节旋钮500保持定格状态,车辆仍继续按速度线502与对格线501定格的速度值503所对应的速度运行。
进一步的,在对格线501对正到速度线502与速度值503的零值时,车辆已经停止或者正在停车,此时,向上拨动意味着给出倒车的信号,向下拨动意味着给出向前行驶的信号,速度线502与速度值503的零值附近有1/4~1/2个刻度的零速过渡。
所述急停键600与遥控装置其它功能部件分立,可以优先给车辆驾驶系统发送紧急信号,在按下急停键600之后,能够在动能回收系统之外立即启动机械制动。
进一步的,物理键的所有功能均能够在app软件上实现,但信号优先级在物理键之下。
进一步的,在把遥控器当纯平板电脑使用的时候,可以选择关闭物理键的功能。但在要启动车辆的时候,必须同时开启物理键的功能,系统和app软件才能运行,以避免在app卡顿或闪退的时候仍能通过物理键正常驾驭车辆。
本实施例中,如图1所示,电动汽车遥控装置俯视结构示意图,体现了遥控装置的正面布局,主机盘100安装在底框架200之上,开关键300布置于上方偏左位置,转向灯拨杆400和速度调节旋钮500位于双手左右托住遥控装置以后手指仍然能够方便触摸到的位置,急停键600位于右手侧略往上的位置。其中,主机101包含主板、存储、芯片组、感应装置、信号装置、电池、电源管理等电子部件。主显示屏102居中设置,屏幕尺寸与平板电脑相当,能够显示导航信息、工作文件或者游戏界面,或者分屏显示导航信息和路面状况,主显示屏102全屏或分屏显示路面状态的时候,可以不依靠挡风玻璃观察车外情况。副显示屏103有三块,提供后轮转向控制、鸣笛、雨刮器、灯光等功能控制界面,对于当前行驶环境不必要的功能控制,可以翻页跳过,保留当前行驶环境必要的功能显示。home键及车标位104位于底部居中。触感垫105位于手指轻易可以触碰的两边,手指对触感垫105顺时针或逆时针方向揉搓,通过主机盘100相对底框架200的旋转,触发位移感应器109的发出转向位移信号,转向位移信号最终传送给转向伺服电机,实现对车辆前轮的转向控制。方向指示110位于顶部居中,通过与正向线115的相对位置,能够很直观地显示方向的精准性。音响112四个,分布于四个方位,音响除了娱乐功能,在驾驶过程中,能够播报一些重要的提示或者警报。前摄像头113与开关键300对称布置。
需要说明的是,结构示意图仅是对部分显见结构的描述,为简洁表达的需要,本图及以下示意图并未体现同方向视图的所有构造。
本实施例中,如图2所示,图1中的转向灯拨杆400放大图。转向灯拨杆400包含回正线401,拨杆402,右转指示403,左转指示404。车辆直行时,拨杆402对正回正线401。当车辆需要右转或向右变道时,拨杆402向上拨向右转指示403,车辆右灯闪烁,3秒钟后手指对触感垫105顺时针方向搓动,主机盘100相对底框架200顺时针旋转,车辆前轮向右转向,右转即将到位时,手指对触感垫105逆时针方向搓动,位移感应器109感知到位移方向反转,此时方向开始回正的同时发出回正信号给拨杆402,拨杆402自动向下归位对正回正线401,右灯停闪,当方向指示110与正向线115对正,车辆由右转恢复到直行。同理,当车辆需要左转或向左变道时,拨杆402向下拨向左转指示404,车辆左灯闪烁,3秒钟后手指对触感垫105逆时针方向搓动,主机盘100相对底框架200逆时针旋转,车辆前轮向左转向,左转即将到位时,手指对触感垫105顺时针方向搓动,位移感应器109感知到位移方向反转,此时方向开始回正的同时发出回正信号给拨杆402,拨杆402自动向上归位对正回正线401,左灯停闪,当方向指示110与正向线115对正,车辆由左转恢复到直行。
本实施例中,如图3所示,图1中的速度调节旋钮500放大图。速度调节旋钮500包含对格线501,速度线502,速度值503。对格线501固定不动,速度线502与速度值503是一起被拨动的,速度线502分成多个刻度,每个刻度对应速度值503相应的速度,拨动是无级调速方式,速度线502对应速度值503是正值时,速度线502的每个刻度代表5公里/小时,如果只拨动半个刻度,则增加或减少2.5公里/小时。速度线502的每一个刻度均可定格在与对格线501的对齐位置(拨动半个刻度难以定格),对齐定格后离手,车辆继续按速度线502与对格线501定格的速度值503所对应的速度运行。
进一步的,在对格线501对正到速度线502与速度值503的零值时,车辆已经停止或者正在停车,此时,向上拨动意味着给出倒车的信号,向下拨动意味着给出向前行驶的信号,零值附近的过渡不会也不应该是无级调速的,有1/4~1/2个刻度的零速或不响应过渡。本实施例给出零值上下各1/3个刻度的不响应过渡。
值得说明的是,速度值503是负值时,车辆倒车,此时不建议定格离手,倒车结束后0速刻度线对正对格线501。此实施例中,倒车车速最大5公里/小时,前行车速最大不超过80公里/小时,在未拨动时,速度线502与速度值503所显示的速度范围在-2~25公里/小时。
进一步的,在程序设计时,需要考虑到以下情况。当车辆在以50公里/小时的速度行驶时,此时若需要减速,则向下拨动速度调节旋钮500,若缓慢向下拨动,则给车辆一个缓慢减速的信号,若快速拨动到较低速度,则快速制动到指定速度,或快速拨动到零,则紧急制动。当从较高速度快速拨至速度为负值时,给车辆的信号仍然是立即紧急制动,并不会制动停车后立即倒车,但系统会在主显示屏102给出一个等待倒车的确认信号。
进一步的,当较为频繁使用紧急情况下的机械制动,导致刹车盘温度较高,或者超过警戒温度时,车辆驾驶系统可以警示一个限制车速。
本实施例中,如图4所示,图1中的A-A剖面结构示意图。主机盘100安装在底框架200之上,转向灯拨杆400和速度调节旋钮500安装在主机盘100当中,硅胶构造件205在主机盘100和底框架200之间,硅胶构造件205起到一定程度的密闭作用,以及增加主机盘100和底框架200之间相对旋转时的摩擦系数。图示左右不对称的问题,参考图18、19。关于主机盘100相对底框架200的旋转,后面再详尽说明。
本实施例中,如图5所示,图4中的C标注部分放大图。主机101和底框架骨架201之间,轴承203部分承担着支承和旋转定位的功能,主机转轴橡胶件106和底框架转轴橡胶件202的作用是防止松动,主机转轴橡胶件106和底框架转轴橡胶件202在装配时可以涂抹可固化硅胶以加强防松动效果。
本实施例中,如图6所示,图4中的D标注部分放大图。主机101,触感垫105,底框架骨架201,托手垫206,硅胶构造件205的相对位置,以及底框架骨架201、导轨橡胶件204与导轨107的结构。导轨橡胶件204通过防脱落结构和可固化硅胶固定在底框架骨架201上,导轨橡胶件204与导轨107在主机101和底框架骨架201之间承担支承和旋转定位的功能。导轨橡胶件204的硬度和弹性与主机盘100相对底框架200旋转的摩擦力大小相关。
本实施例中,如图7所示,图4中的E标注部分放大图。主机101,触感垫105,底框架骨架201,托手垫206,硅胶构造件205的相对位置。硅胶构造件205嵌在主机101和底框架骨架201之间,其松紧度决定主机盘100和底框架200之间的密闭程度,以及与主机盘100相对底框架200旋转的摩擦力大小相关。若需要密闭性好一些,旋转的力度大一些,则硅胶构造件205的直径略大一些或者硬度略大一些。若硅胶构造件205的直径略大一些,在嵌入主机101和底框架骨架201之间的时候就被压缩得多一些,相应的摩擦力就会大一些。
本实施例中,如图8所示,图1中的B-B剖面结构示意图。主机盘100安装在底框架200之上,方向指示110和home键及车标位104没有触感垫105那般隆起。关于左右不对称的问题,参考图18、19。
本实施例中,如图9所示,主机盘100之A-A剖面结构示意图。主机101,触感垫105,主机转轴橡胶件106,导轨107的标注。
本实施例中,如图10所示,主机盘100之A-A剖面骨架结构示意图。主机101,导轨107的标注。
本实施例中,如图11所示,底框架200之A-A剖面结构示意图。底框架骨架201,底框架转轴橡胶件202,轴承203,导轨橡胶件204以及托手垫206的标注。图示左右不对称的问题,参考图18、19。
本实施例中,如图12所示,底框架200之A-A剖面骨架结构示意图。
本实施例中,如图13所示,主机盘100仰视结构示意图。体现转向灯拨杆400、速度调节旋钮500所占空间在主机101的相对位置。
本实施例中,如图14所示,体现导轨107的主机盘100仰视结构示意图。其中标注F的部位,有导轨107的至少六个导轨固定件108当中的一个。
本实施例中,如图15所示,图14中的F标注部分立面示意放大图。在图6的基础上,体现了导轨固定件108的相对位置。在遥控装置生产装配时,可以先把导轨107固定在导轨橡胶件204当中,导轨固定件108两端车螺纹,其中一端拧入预先攻有螺孔的导轨107当中,另一端在主机101当中固定,最后装上触感垫105完成装配。
本实施例中,如图16所示,导轨107示意图。
本实施例中,如图17所示,导轨107拆分结构示意图。导轨107拆分成两个的目的,是可以适应多种装配工艺的需要。在导轨橡胶件204有足够弹性,把导轨107挤压装入导轨橡胶件204而不影响性能的情况下,且与其它装配要求不冲突,此时导轨107可以是一个整体,不作拆分需要。
本实施例中,如图18所示,底框架200俯视结构示意图。其中体现的导轨橡胶件204没有严格的左右和上下对称,在A-A剖面图和B-B剖面图中,也就体现了存在和不存在的结构。
本实施例中,如图19所示,体现导轨107和位移感应器109的底框架200俯视结构示意图。
进一步的,结合图1、4、14、15、19所示,本实施例中,主机盘100能够相对底框架200旋转任意角度。主机盘100在相对底框架200旋转的过程中,主机盘100与底框架200通过轴承203中心定位,主机盘100当中的导轨107在底框架200当中的导轨橡胶件204固定下旋转,导轨107与导轨橡胶件204之间有一定的摩擦力,嵌在主机101和底框架骨架201之间的硅胶构造件205也提供一定的摩擦力,位移感应器109感知移动距离,发送转向信号给车辆驾驶系统,最终转向信号传递给转向驱动电机,完成转向的目的。
进一步的,主机盘100相对底框架200顺时针及逆时针分别转向90度,即可达到车辆前轮向任意方向转向的目的。
需要说明的是,在人工接管驾驶中,车辆后轮的转向不常用,不特别启用后轮转向功能的物理键,但可以在app中实现车辆后轮的转向。
本实施例中,如图20所示,遥控装置仰视结构示意图。体现底框架骨架201,托手垫206,以及支撑固定位207和后摄像头114的分布。后摄像头114所处位置有足够的厚度,可以采用具有高倍数的光学变焦或者长焦功能的镜头。
进一步的,本实施例中,经四个支撑固定位207配合,采用支架连接固定遥控装置,搓动触感垫105,可以像搓动传统方向盘一样的手感控制车辆的转向。
需要说明的是,无论遥控装置无论是否支架固定,都可以单手操控。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但是本发明并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些均应包含在本发明的保护范围之内。
- 一种电动汽车遥控装置
- 一种遥控装置的智能控制方法及一种智能遥控装置